|
Funktion
|
ACS-Treibermodul IDMsm mit Anschlüssen für Positionierer von PI
|
|
|
Ausführung
|
19-Zoll-Rackeinschub-Gehäuse
|
|
|
Motortypen
|
2- und 3-phasige AC-Servomotoren / bürstenlose DC-Motoren, bürstenbehaftete DC-Motoren, Voice-Coil-Motoren, Schrittmotoren
|
|
|
Anzahl Antriebsachsen
|
4
|
|
|
Bewegung und Regler
|
G-902.R1I001 / G-902.R2I001
|
|
|
Abtast-/Update-Rate des Regelkreises
|
20 kHz Position20 kHz Geschwindigkeit20 kHz Strom
|
|
|
Regelungsalgorithmen
|
Kaskadierte PIVFF-Reglerstruktur mit Filtern zur RegelkreisoptimierungGeschwindigkeits-VorsteuerungMIMO- (Multiple Input Multiple Output-) Gantry-RegelalgorithmusDual-Loop-RegelungStörungsunterdrückungGain-SchedulingFeldorientierte RegelungRaumzeiger-Modulation
|
|
|
Profilerzeugung
|
3. Ordnung mit gleichmäßiger Endpunkt-Modifizierung während des Betriebs
|
|
|
Encoder
|
1 × je Achse, unterstützte Typen:Inkrementell: 1 Vss, RS-422Absolut: BiSS-C, EnDat 2.1 & 2.2, Smart-Abs, SSI, Sanyo-Denki, Panasonic A6
|
|
|
Endschalter
|
2 × je AchseStandard: 5 V Sinking (NPN)Optionale Konfiguration: 24 V; Sourcing (PNP)
|
|
|
Referenzschalter
|
Standard: 1 × je Achse, 5 V Sinking (NPN)Optionale Konfiguration: 24 V; Sourcing (PNP); Nutzung als digitale Mehrzweck-Eingänge auf dem Anschluss Digital I/O (HD D-Sub 15 (f))
|
|
|
Motorbremse
|
1 × je AchseIntegrierter PWM-Bremsentreiber mit Stromreduzierung für verringerte Erwärmung der Bremse
|
|
|
Funktionale Sicherheit
|
STO (Safe Torque Off):Elektrische Schnittstelle: Zweikanaliger Eingang, 24 V, isoliertSicherheitsnormen:EN/IEC 61800-5-2 Ed. 2 (Second Environment)EN/IEC 61800-5-1IEC 61508IEC 62061Performance-Level PLe und Kategorie 3 gemäß:EN ISO 13849-1/-2SS1 (Safe Stop 1):Abbremszeit bis zur STO-Aktivierung: 110-230 msDer genaue Wert für die Abbremszeit ist ein fester Wert (SS1-t-Funktionalität) und hängt von der Produktkonfiguration ab.
|
|
|
Elektrische Eigenschaften
|
G-902.R1I001
|
G-902.R2I001
|
|
Zwischenkreisspannung
|
48 V
|
48 V
|
|
Ausgangsleistung Zwischenkreis, Dauer / Spitze (max. 10 s)
|
550 W / 550 W bei 40 °C
|
1000 W / 1200 W bei 40 °C
|
|
Ausgangsleistung pro Achse (Effektivwert), Dauer / Spitze (max. 1 s)
|
186 W* / 363 W*
|
186 W / 363 W
|
|
Strombegrenzung pro Motorphase (Amplitude Sinus), Dauer / Spitze (max. 1 s)
|
5 A / 10 A
|
5 A / 10 A
|
|
Schnittstellen und Bedienung
|
G-902.R1I001 / G-902.R2I001
|
|
|
Motoranschluss
|
4 × HD D-Sub 26 (f)
|
|
|
Sensoranschluss
|
4 × HD D-Sub 26 (f) oder über die MotoranschlüsseAnschlussauswahl pro Achse über DIP-Schalter
|
|
|
Digitale Eingänge
|
Standard:4 × NPN 5 V Sinking für Referenzschalter auf den Motor- und Encoder-AnschlüssenOptionale Konfiguration:Bis zu 4 Mehrzweck-Eingänge, PNP 24 V Source, parallel auf 2 × HD D-Sub 15 (f)
|
|
|
Digitale Ausgänge
|
2 × HD D-Sub 15 (f):4 × Ausgang PNP 24 V Source; Verwendung zur Ansteuerung der BremsentreiberD-Sub 25 (f):8 × Mehrzweck-Ausgang, differenziell (RS-422)
|
|
|
Analoge Ein-/Ausgänge
|
HD D-Sub 15 (m):2 differenzielle analoge Eingänge: ±10 V, 12-bit2 differenzielle analoge Ausgänge: ±10 V, 10-bit
|
|
|
Ausgänge für Position Event Generator (PEG)
|
Parallel auf HD D-Sub 15 (m) und HD D-Sub 15 (f):4 differenzielle Ausgänge (RS-422) für Pulse an programmierbaren Positionen, Pulsweite 27 ns bis 1,745 ms, max. 10 MHz; nur möglich mit inkrementellem Encoder
|
|
|
Eingänge für STO Sicherheitsfunktion
|
D-Sub 9 (f):2 Eingänge (STO1, STO2): 24 V, bis zu 50 mA pro STO-Eingang, mit einem Einschaltstrom von weniger als 70 mA
|
|
|
LEDs
|
Zustand der Sicherungen für die 24 V Spannungsversorgung, STO-Signale, Logikversorgung
|
|
|
Kommunikations-Schnittstellen
|
EtherCAT IN und OUT: RJ-45Ethernet (TCP/IP, Ethernet/IP, Modbus/TCP): RJ-45RS-232: D-Sub 9 (m)
|
|
|
Bedienersoftware
|
ACS SPiiPlus MMI Application Studio
|
|
|
Schnittstellen zur Anwendungsprogrammierung
|
Programmierbibliotheken für C/C++, COM, .NET, MATLAB verfügbar
|
|
|
Programmierung
|
ACSPL+ Echtzeit-Skriptsprache: bis zu 4 simultan laufende Programme (Buffer)
|
|
|
Umgebung
|
G-902.R1I001 / G-902.R2I001
|
|
|
Betriebsspannung
|
100-240 V AC, 50-60 Hz
|
|
|
Erforderliche Absicherung pro Netzanschluss
|
IEC: 12-16 A bei 250 V AC; 50 HzUL/CSA: 12-20 A bei 125/250 V AC; 60 Hz
|
|
|
Betriebstemperaturbereich
|
5 bis 40 °C (Temperaturschutz schaltet bei zu hohen Temperaturen ab)
|
|
|
Masse
|
10 kg
|
|
|
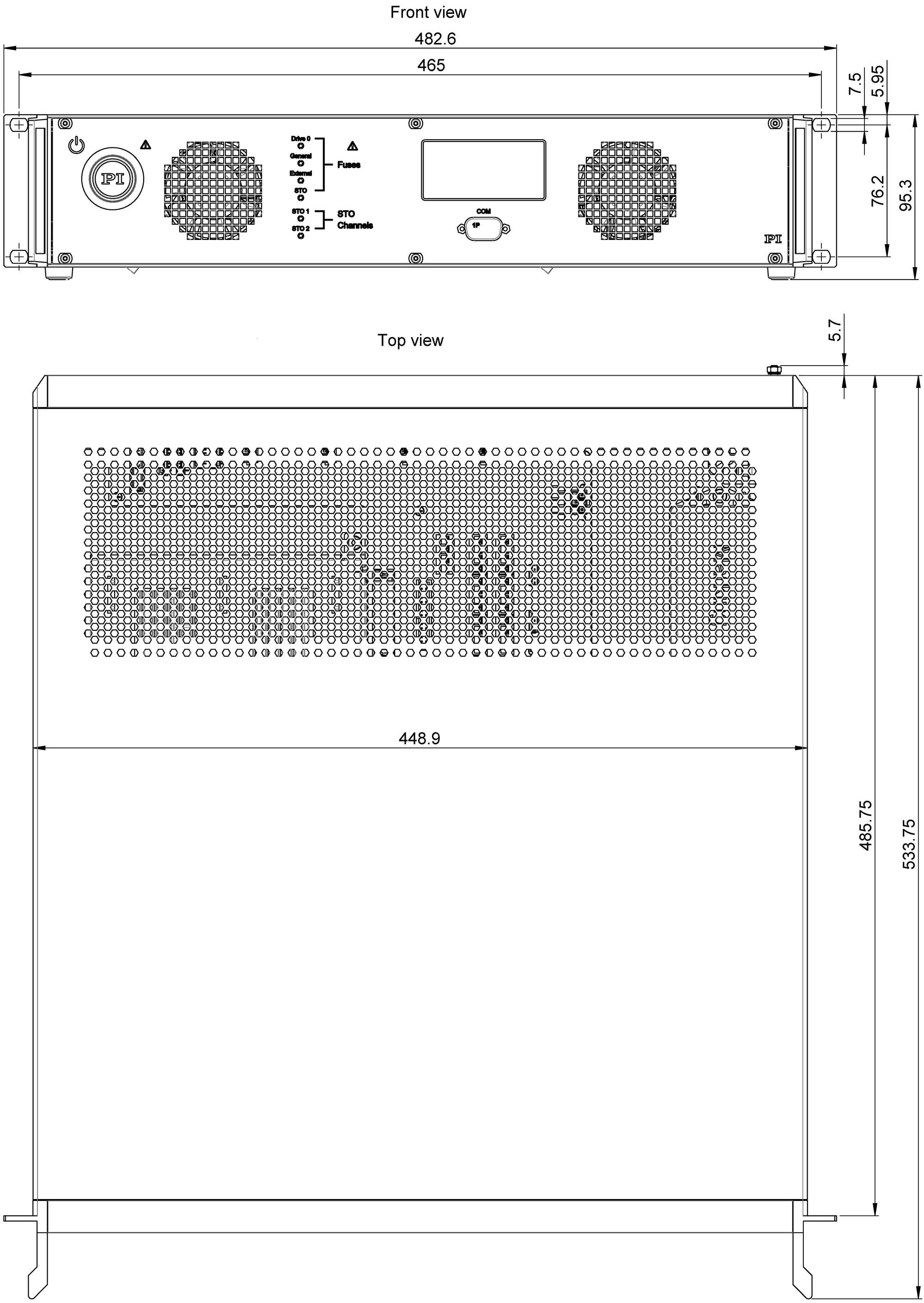
Abmessungen
|
482,6 mm × 533,75 mm × 95,3 mm (inklusive Griffe)
|
|