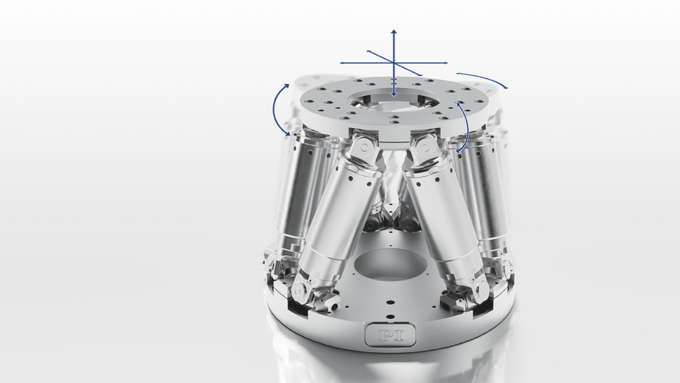
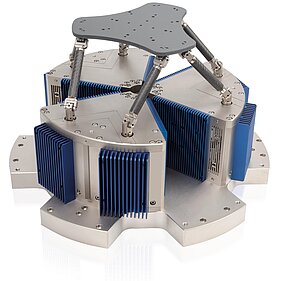
Ein Hexapod ist eine parallelkinematische Bewegungsplattform, die Lasten in sechs Freiheitsgraden bewegt, positioniert und ausrichtet – in drei translatorischen Achsen (X, Y, Z) und drei rotatorischen Achsen (ΘX, ΘY, ΘZ).
Die typische Struktur eines Hexapods, auch als Stewart-Plattform bezeichnet, besteht aus sechs längenveränderlichen Aktoren, die über Gelenke mit der Grundplatte und einer Bewegungsplattform verbunden sind, die die Last trägt. Aufgrund des parallelkinematischen Designs können Hexapoden komplexe mehrachsige Bewegungsprofile mit hoher Wiederholgenauigkeit, Dynamik und Stabilität ausführen. Gleichzeitig zeichnen sie sich durch eine kompakte Bauform aus.

In den Präzisionshexapoden von PI stecken mehr als drei Jahrzehnte Entwicklungs- und Fertigungserfahrung. Das breite Portfolio an Antriebstechnologien – von piezoelektrisch bis elektromagnetisch – versetzt PI bei Kombination mit entsprechender Sensorik, Software und Bewegungssteuerung in die Lage, Hexapoden für unterschiedlichste Spezifikationsanforderungen und Einbausituationen anzubieten. Dank leistungsstarker, intuitiver Controller und Software lassen sich die Hexapoden einfach ansteuern. Der vom Nutzer frei definierbare Drehpunkt bietet außerdem größtmögliche Flexibilität in der Anwendung.
Hexapoden von PI sind in verschiedenen Größen und Konfigurationen erhältlich und decken eine Vielzahl von Anwendungen ab – von der Probenpositionierung in Experimenten über die aktive Ausrichtung optischer Fasern und Elemente bis hin zur automatisierten Montage.
Entdecken Sie unsere breite Palette an Präzisionshexapoden für Lasten von 1 kg bis 250 kg Standardwert und Wiederholgenauigkeiten bis zu ±0,06 µm. Kundenspezifische Präzisionshexapoden können sogar Lasten von mehr als 2.000 kg tragen.


Die hochpräzisen Miniaturhexapoden von PI bieten ein perfektes Gleichgewicht zwischen Größe, Nutzlast und Leistung. Anwendungen wie die Positionierung von Werkzeugen oder Werkstücken in der Mikromontage, die Ausrichtung optischer Fasern in der Siliziumphotonik oder die Simulation von Bewegungen für Funktionstests profitieren von den ultrakompakten Hexapoden. Für den Einsatz im Vakuum sind auch Varianten für Vakuumumgebungen bis 10-6 hPa erhältlich.








Die mittelgroßen Präzisionshexapoden von PI sind in einer Vielzahl von Varianten für unterschiedlichste Anwendungsanforderungen erhältlich – von dynamischen Hexapoden für die Bewegungssimulation über Systeme mit höchster Wiederholgenauigkeit für präzises Ausrichten bis hin zu Hexapoden mit gefalteten Antriebssträngen, die bei kompakter Bauform mittlere Lasten positionieren können.






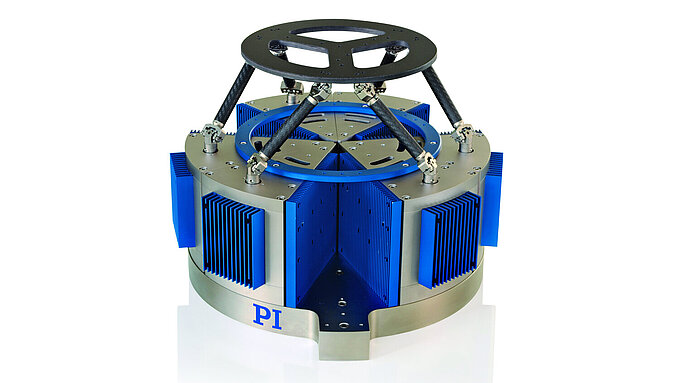
Hochlasthexapoden von PI positionieren große Lasten unabhängig von der Orientierung und Einbausituation sicher und präzise. Spezielle kardanische Gelenke mit Z-Versatz und weitere spielfreie und steife Komponenten machen dies möglich. Die Anwendungen reichen von der Bewegung schwerer Bauteile und Optiken über die Positionierung von Inspektionswerkzeugen in Industrie und Forschung bis hin zur Ausrichtung von Reflektoren in Teleskopen.



PI verfügt über langjährige Erfahrung in der Vakuumtechnik sowie über eine hohe Fertigungstiefe. Daher ist PI in der Lage, Standard- und kundenspezifische Hexapoden anzubieten, die an die Anforderungen der Vakuumanwendungen angepasst sind: angefangen bei der Auswahl des passenden Designs über geeignete Antriebskomponenten, Materialien und Zubehöre bis hin zu entsprechenden Fertigungsprozessen und Qualitätskontrollen.
Standardhexapoden sind für Vakuumumgebungen bis 10-6 hPa erhältlich, kundenspezifische Hexapoden können auch für höhere Vakuumklassen ausgelegt werden.



Controller, Software und Integration
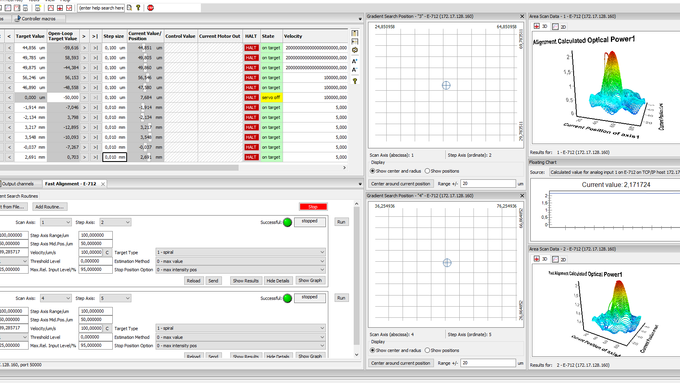
Der Hexapod-Controller ermöglicht eine einfache und intuitive Ansteuerung parallelkinematischer 6-DoF-Systeme: Alle Zielpositionen können in kartesischen Koordinaten kommandiert werden. Die Berechnungen für die Ansteuerung der einzelnen Beine und der daraus resultierenden gewünschten Bewegung der Plattform übernimmt der Controller.
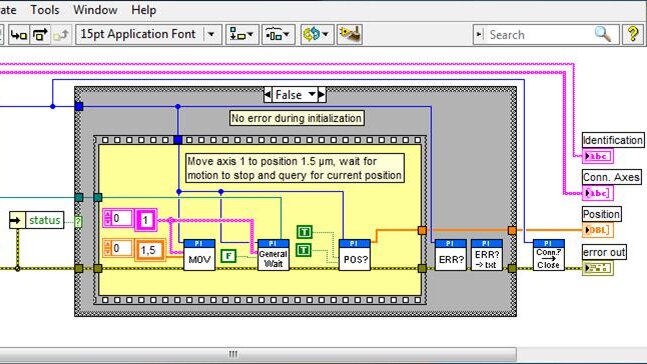
Die Lage und Ausrichtung sowohl des Bezugskoordinatensystems als auch des Drehpunkts können komfortabel in der Software definiert und auf die Anwendung abgestimmt werden. Mit der universellen GUI von PI lassen sich nicht nur alle Hexapod-Systeme, sondern auch alle anderen Positioniersysteme von PI mit jeglicher Antriebstechnologie ansteuern und in Betrieb nehmen. Die PI Software Suite, ein umfangreiches Softwarepaket, bietet darüber hinaus Treiber und Bibliotheken für viele gängige Programmiersprachen.
Die Emulation des Controllers erleichtert die Einbindung in die kundenseitige Programmierung bereits vor der Bereitstellung des Hexapods. So können Kunden schon vor Erhalt des Systems Anwenderprogramme entwickeln, testen und optimieren und den Hexapod in die Produktivumgebung integrieren.
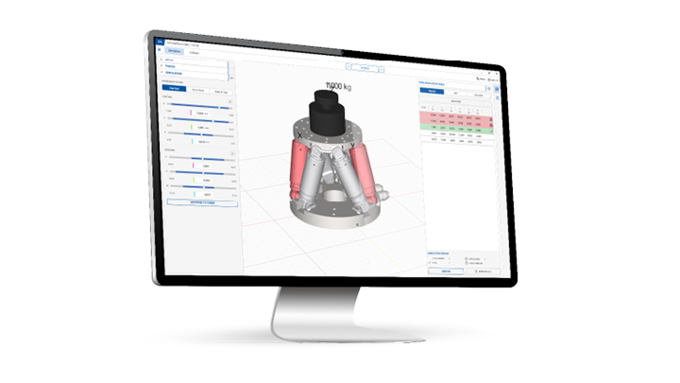
Für die Vereinfachung der Implementierung kann auch das Simulationsprogramm für Parallelkinematiken genutzt werden, das die Berechnung und Darstellung des Arbeitsraums und von Lastverhältnissen ermöglicht. Für die Einbindung in Automatisierungsprozesse steht optional auch eine industrielle EtherCAT-Schnittstelle zur Verfügung.