H-824.D2
Kompakter Hexapod; Direktantrieb; 5 kg Nutzlast; 25 mm/s maximale Geschwindigkeit; D-Sub-Stecker. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.

Belastungsgrenzen des H-824.D2 bei horizontaler Montage

Belastungsgrenzen des H-824.D2 bei vertikaler Montage

Belastungsgrenzen des H-824.D2 bei Montage unter ungünstigstem Winkel

Maximal zulässige Krafteinwirkung auf den H-824.D2 bei horizontaler Montage

Belastungsgrenzen des H-824.G2 bei horizontaler Montage

Belastungsgrenzen des H-824.G2 bei vertikaler Montage

Belastungsgrenzen des H-824.G2 bei Montage unter ungünstigstem Winkel

Maximal zulässige Krafteinwirkung auf den H-824.G2 bei horizontaler Montage
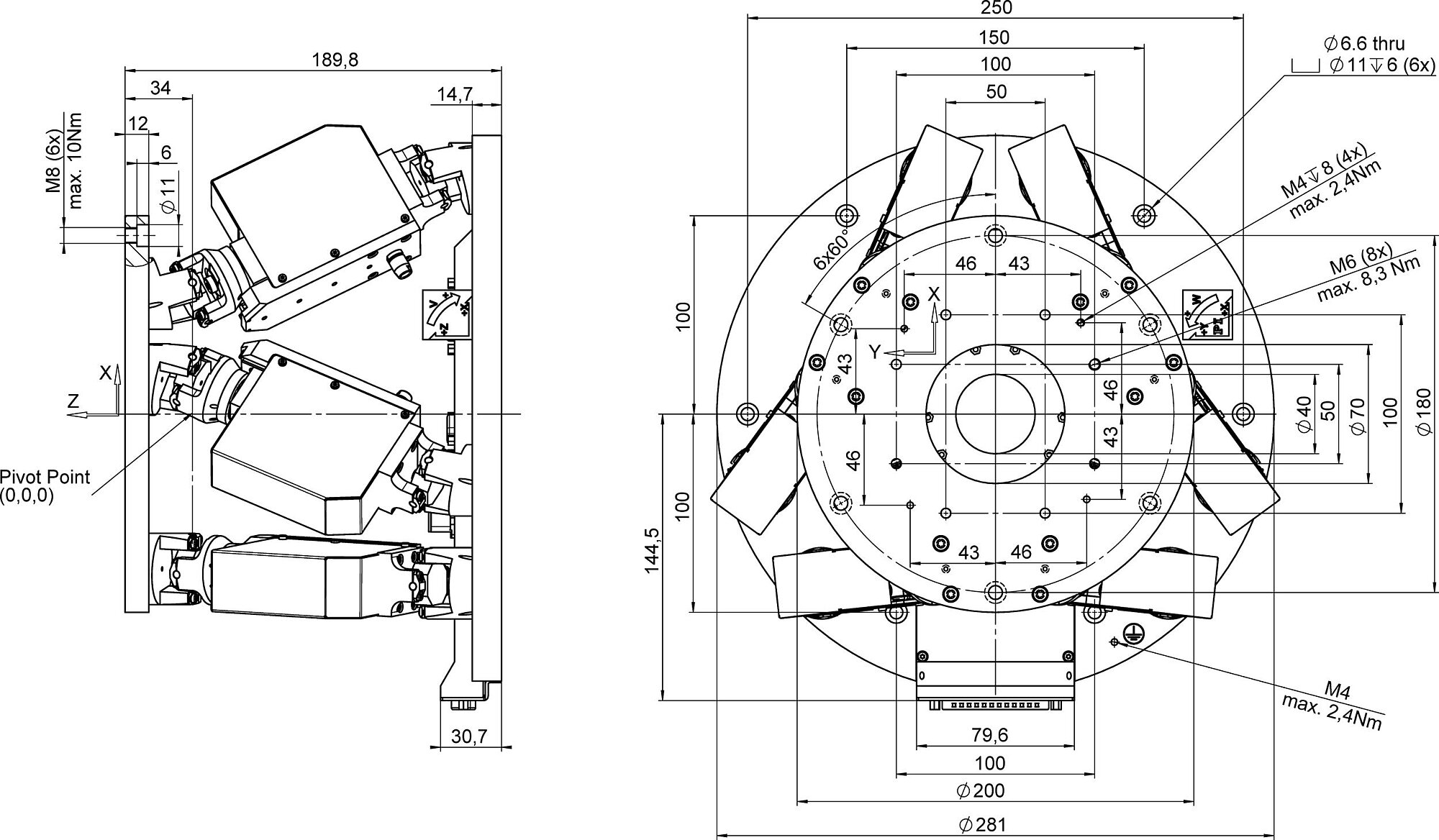
H-824, Abmessungen in mm, bei Nullposition des Nominalstellweges










6-Achs-Positioniersystem der Präzisionsklasse
Parallelkinematischer Aufbau für 6 Freiheitsgrade, dadurch wesentlich kompakter und steifer als Seriellkinematiksysteme, höhere Dynamik, keine bewegten Kabel: höhere Zuverlässigkeit, reduzierte Reibung. Kompakt durch gefaltetes Antriebsdesign.
PIVirtualMove
Die Simulationssoftware simuliert die Grenzen des Arbeitsraums und der Nutzlast eines Hexapoden. Damit kann bereits vor einer Kaufentscheidung überprüft werden, ob ein bestimmtes Hexapod-Modell die auftretenden Lasten, Kräfte und Momente in einer Anwendung aufnehmen kann. Das Simulationstool berücksichtigt dazu die Lage und die Bewegung des Hexapoden, sowie die Position des Pivotpunkts und verschiedene Bezugskoordinatensysteme.
Einsatzgebiete
Industrie und Forschung. Für Mikromanipulation, Biotechnologie, Halbleiterfertigung
| Bewegen | H-824.D2 | H-824.G2 | Toleranz |
|---|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 22,5 mm | ± 22,5 mm | |
| Stellweg in Y | ± 22,5 mm | ± 22,5 mm | |
| Stellweg in Z | ± 12,5 mm | ± 12,5 mm | |
| Rotationsbereich in θX | ± 7,5 ° | ± 7,5 ° | |
| Rotationsbereich in θY | ± 7,5 ° | ± 7,5 ° | |
| Rotationsbereich in θZ | ± 12,5 ° | ± 12,5 ° | |
| Maximale Geschwindigkeit in X | 25 mm/s | 1 mm/s | |
| Empfohlene Geschwindigkeit in X | 10 mm/s | 0,5 mm/s | |
| Maximale Geschwindigkeit in Y | 25 mm/s | 1 mm/s | |
| Empfohlene Geschwindigkeit in Y | 10 mm/s | 0,5 mm/s | |
| Maximale Geschwindigkeit in Z | 25 mm/s | 1 mm/s | |
| Empfohlene Geschwindigkeit in Z | 10 mm/s | 0,5 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 270 mrad/s | 11 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 55 mrad/s | 5,5 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 270 mrad/s | 11 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 55 mrad/s | 5,5 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 270 mrad/s | 11 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 55 mrad/s | 5,5 mrad/s | |
| Positionieren | H-824.D2 | H-824.G2 | Toleranz |
| Kleinste Schrittweite in X | 2 µm | 0,3 µm | typ. |
| Kleinste Schrittweite in Y | 2 µm | 0,3 µm | typ. |
| Kleinste Schrittweite in Z | 1 µm | 0,3 µm | typ. |
| Kleinste Schrittweite in θX | 12 µrad | 3,5 µrad | typ. |
| Kleinste Schrittweite in θY | 12 µrad | 3,5 µrad | typ. |
| Kleinste Schrittweite in θZ | 14 µrad | 3,5 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,5 µm | ± 0,25 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,5 µm | ± 0,25 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,15 µm | ± 0,1 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in θX | ± 3 µrad | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θY | ± 3 µrad | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 2,5 µrad | ± 2 µrad | typ. |
| Umkehrspiel in X | 1,5 µm | 2 µm | typ. |
| Umkehrspiel in Y | 1,5 µm | 2 µm | typ. |
| Umkehrspiel in Z | 1 µm | 0,7 µm | typ. |
| Umkehrspiel in θX | 15 µrad | 14 µrad | typ. |
| Umkehrspiel in θY | 15 µrad | 14 µrad | typ. |
| Umkehrspiel in θZ | 30 µrad | 17 µrad | typ. |
| Antriebseigenschaften | H-824.D2 | H-824.G2 | Toleranz |
| Antriebstyp | DC-Motor | DC-Getriebemotor | |
| Nennspannung | 24 V | 24 V | |
| Mechanische Eigenschaften | H-824.D2 | H-824.G2 | Toleranz |
| Steifigkeit in X | 1,7 N/µm | 1,7 N/µm | |
| Steifigkeit in Y | 1,7 N/µm | 1,7 N/µm | |
| Steifigkeit in Z | 7 N/µm | 7 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 5 kg | 10 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 2,5 kg | 5 kg | |
| Maximale Haltekraft, passiv, Grundplatte horizontal | 15 N | 100 N | |
| Maximale Haltekraft, passiv, Grundplatte in beliebiger Ausrichtung | 5 N | 50 N | |
| Gesamtmasse | 8 kg | 8 kg | |
| Material | Aluminium | Aluminium | |
| Anschlüsse und Umgebung | H-824.D2 | H-824.G2 | Toleranz |
| Betriebstemperaturbereich | -10 bis 50 °C | -10 bis 50 °C | |
| Anschluss Datenübertragung | HD D-Sub 78 (m) | HD D-Sub 78 (m) | |
| Anschluss Versorgungsspannung | M12 4-polig (m) | M12 4-polig (m) | |
| Empfohlene Controller/Treiber | C-887.5x | C-887.5x |
Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
H-824 Kompakter Hexapod-Mikroroboter
Technical Note für das Auspacken des Hexapods
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Kompakter Hexapod; Direktantrieb; 5 kg Nutzlast; 25 mm/s maximale Geschwindigkeit; D-Sub-Stecker. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Kompakter Hexapod; getriebeübersetzt; 10 kg Nutzlast; 1 mm/s maximale Geschwindigkeit; D-Sub-Stecker. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

EtherCAT Netzwerke integrieren PI-Controller als Slave. ACS Motion Controller können als EtherCAT Master oder untergeordnet in einer bestehenden Busarchitektur eingebunden werden.

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.

Investigation of the structural properties of thin films under high-vacuum conditions.

At the X-ray light source PETRA III at the DESY research center in Hamburg operates the Imaging Beamline P05.

At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

Flexibilität in der Produktion: Durch Hexapod-Systeme kann die benötigte Installationsfläche für die Robotik erheblich reduziert werden.









