H-825.G2A
Kompakter Hexapod; bürstenloser DC-Getriebemotor; Absolutencoder; 30 kg Nutzlast; 2,5 mm/s maximale Geschwindigkeit. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.

Belastungsgrenzen des H-825.G2A bei horizontaler Montage

Belastungsgrenzen des H-825.G2A bei vertikaler Montage

Belastungsgrenzen des H-825.G2A bei Montage unter ungünstigstem Winkel

Maximal zulässige Krafteinwirkung auf den H-825.G2A bei horizontaler Montage
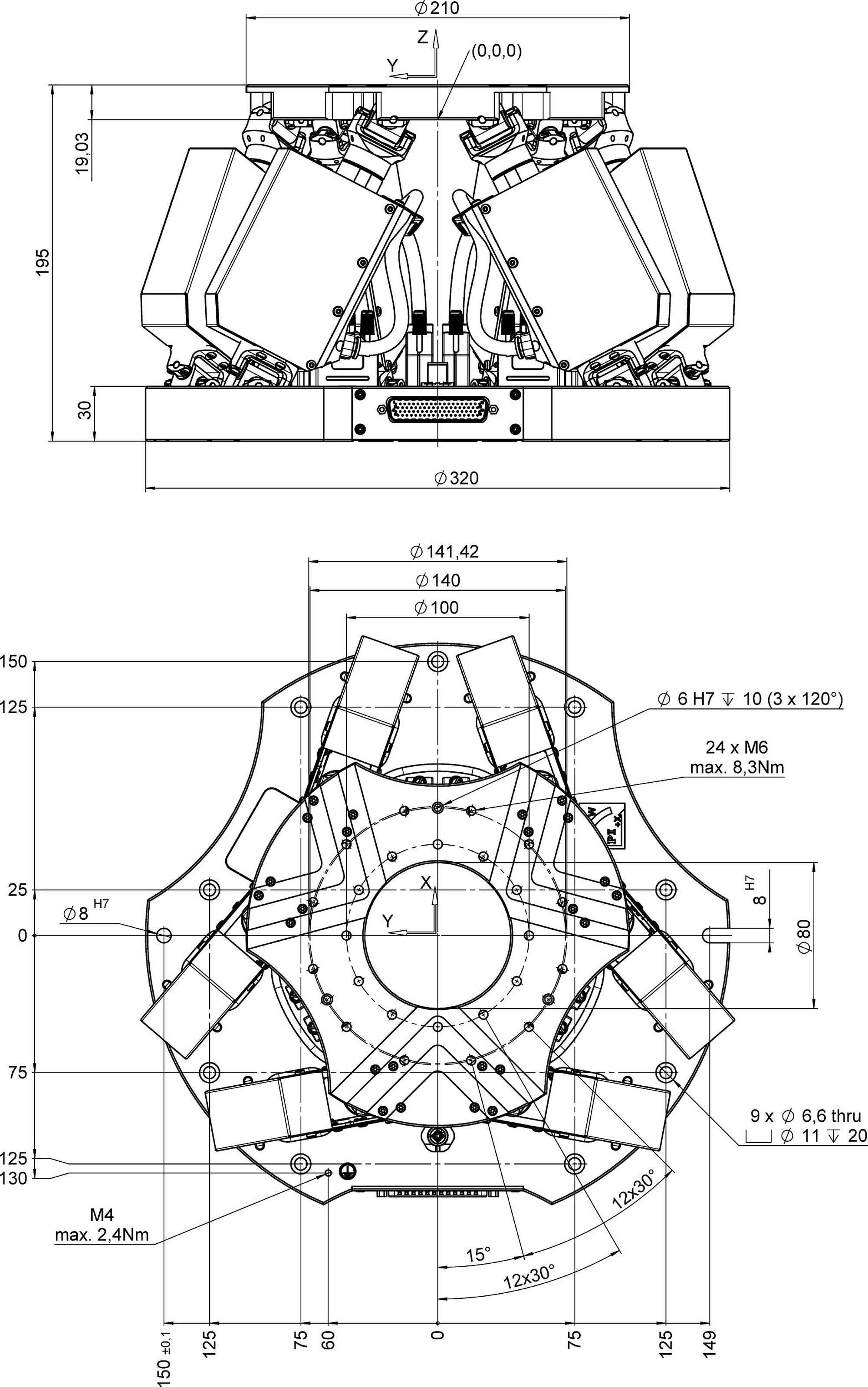
H-825, Abmessungen in mm, bei Nullposition des Nominalstellweges





Parallelkinematischer Aufbau für 6 Freiheitsgrade, dadurch wesentlich kompakter und steifer als Seriellkinematiksysteme, höhere Dynamik, keine bewegten Kabel: höhere Zuverlässigkeit, reduzierte Reibung
BLDC-Motor
Bürstenlose DC-Motoren eignen sich besonders gut für hohe Drehzahlen. Sie lassen sich sehr genau regeln und sorgen für hohe Präzision. Durch den Verzicht auf Schleifkontakte sind sie laufruhig und verschleißarm und erreichen somit eine hohe Lebensdauer.
Absolutencoder
Absolutencoder liefern eindeutige Lageinformationen, die eine sofortige Feststellung der Position ermöglichen. Somit ist keine Referenzierung beim Einschalten erforderlich, Effizienz und Sicherheit im Betrieb können gesteigert werden.
PIVirtualMove
Die Simulationssoftware simuliert die Grenzen des Arbeitsraums und der Nutzlast eines Hexapoden. Damit kann bereits vor einer Kaufentscheidung überprüft werden, ob ein bestimmtes Hexapod-Modell die auftretenden Lasten, Kräfte und Momente in einer Anwendung aufnehmen kann. Das Simulationstool berücksichtigt dazu die Lage und die Bewegung des Hexapoden, sowie die Position des Pivotpunkts und verschiedene Bezugskoordinatensysteme.
Einsatzgebiete
Industrie und Forschung. Für Mikromontage, Biotechnologie, Halbleiterfertigung, Optische Justage.
| Bewegen | H-825.G2A | Toleranz |
|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 27,5 mm | |
| Stellweg in Y | ± 25 mm | |
| Stellweg in Z | ± 14 mm | |
| Rotationsbereich in θX | ± 11,5 ° | |
| Rotationsbereich in θY | ± 10,5 ° | |
| Rotationsbereich in θZ | ± 19 ° | |
| Maximale Geschwindigkeit in X | 2,5 mm/s | |
| Empfohlene Geschwindigkeit in X | 2 mm/s | |
| Maximale Geschwindigkeit in Y | 2,5 mm/s | |
| Empfohlene Geschwindigkeit in Y | 2 mm/s | |
| Maximale Geschwindigkeit in Z | 2,5 mm/s | |
| Empfohlene Geschwindigkeit in Z | 2 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 27 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 5,5 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 27 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 5,5 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 27 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 5,5 mrad/s | |
| Positionieren | H-825.G2A | Toleranz |
| Kleinste Schrittweite in X | 0,3 µm | typ. |
| Kleinste Schrittweite in Y | 0,3 µm | typ. |
| Kleinste Schrittweite in Z | 0,25 µm | typ. |
| Kleinste Schrittweite in θX | 3,5 µrad | typ. |
| Kleinste Schrittweite in θY | 3,5 µrad | typ. |
| Kleinste Schrittweite in θZ | 4 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,5 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,25 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,1 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in θX | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θY | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 2,5 µrad | typ. |
| Umkehrspiel in X | 3 µm | typ. |
| Umkehrspiel in Y | 3 µm | typ. |
| Umkehrspiel in Z | 1 µm | typ. |
| Umkehrspiel in θX | 20 µrad | typ. |
| Umkehrspiel in θY | 20 µrad | typ. |
| Umkehrspiel in θZ | 25 µrad | typ. |
| Integrierter Sensor | Absoluter Rotationsencoder, Multiturn | |
| Antriebseigenschaften | H-825.G2A | Toleranz |
| Antriebstyp | Bürstenloser DC-Getriebemotor | |
| Mechanische Eigenschaften | H-825.G2A | Toleranz |
| Steifigkeit in X | 1,7 N/µm | |
| Steifigkeit in Y | 1,7 N/µm | |
| Steifigkeit in Z | 7 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 30 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 15 kg | |
| Maximale Haltekraft, passiv, Grundplatte horizontal | 300 N | |
| Maximale Haltekraft, passiv, Grundplatte in beliebiger Ausrichtung | 150 N | |
| Gesamtmasse | 10 kg | |
| Material | Aluminium | |
| Anschlüsse und Umgebung | H-825.G2A | Toleranz |
| Betriebstemperaturbereich | -10 bis 50 °C | |
| Anschluss Datenübertragung | HD D-Sub 78 (m) | |
| Anschluss Versorgungsspannung | M12 4-polig (m) | |
| Empfohlene Controller/Treiber | C-887.5x |
Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
H-825 Kompakter Hexapod-Mikroroboter
Technical Note für das Auspacken des Hexapods
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Kompakter Hexapod; bürstenloser DC-Getriebemotor; Absolutencoder; 30 kg Nutzlast; 2,5 mm/s maximale Geschwindigkeit. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
PI bietet Bewegungs- und Steuerungslösungen für höchste Anforderungen der Masken-, Wafer- und Optikpositionierung in der Halbleiterfertigung

Mikromontage verlangt heute nach präzisen Positioniersystemen, die möglichst kompakt sein sollen, um sich gut in die Fertigungseinheiten zu integrieren.

Flexibilität in der Produktion: Durch Hexapod-Systeme kann die benötigte Installationsfläche für die Robotik erheblich reduziert werden.












