H-811.I2
Miniatur-Hexapod; BLDC-Motor; 5 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; 0,5 m Kabellänge. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.

H-811.I2HS
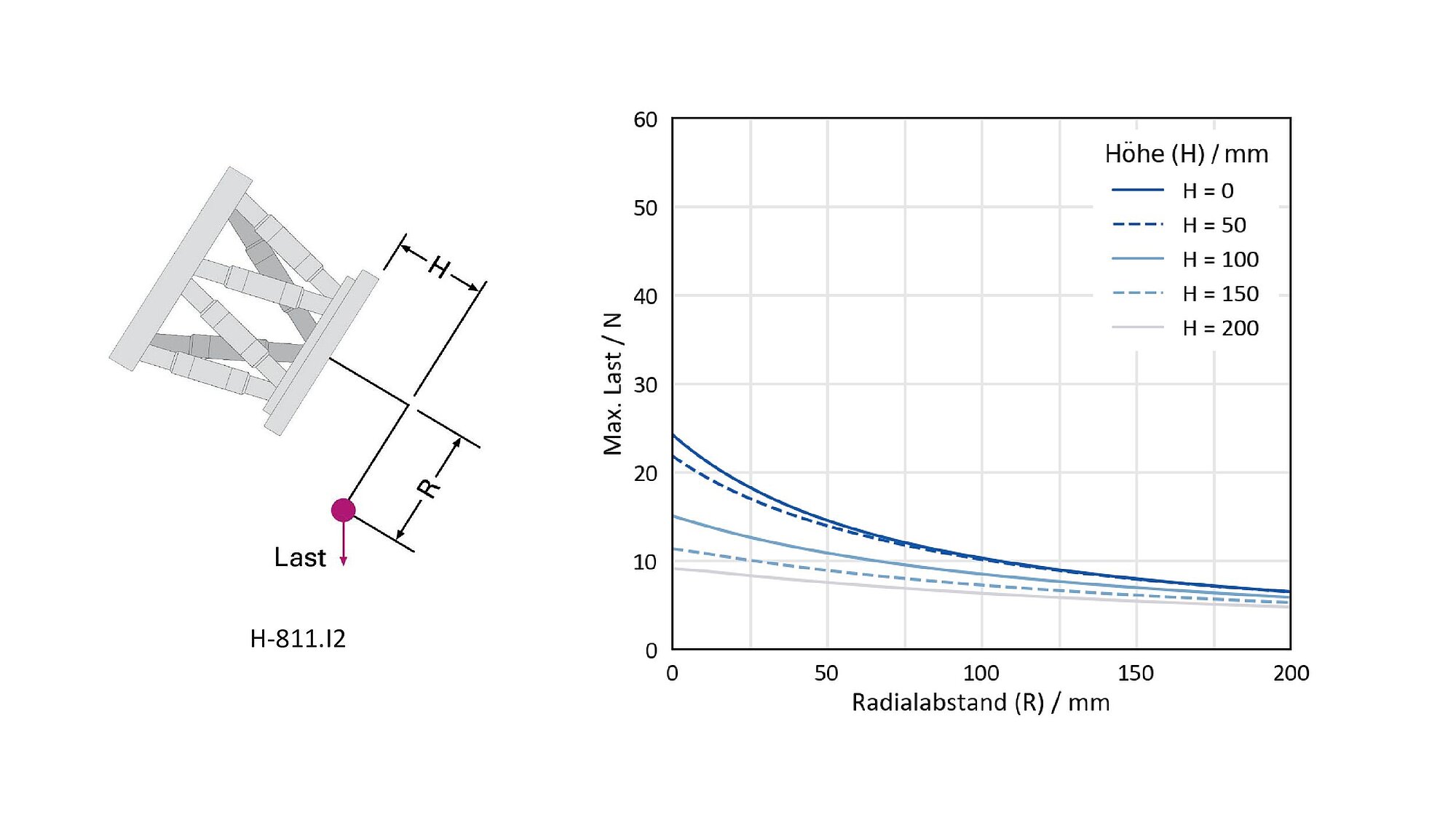
Belastungsgrenzen des H-811.I2 und .I2HS bei horizontaler Montage

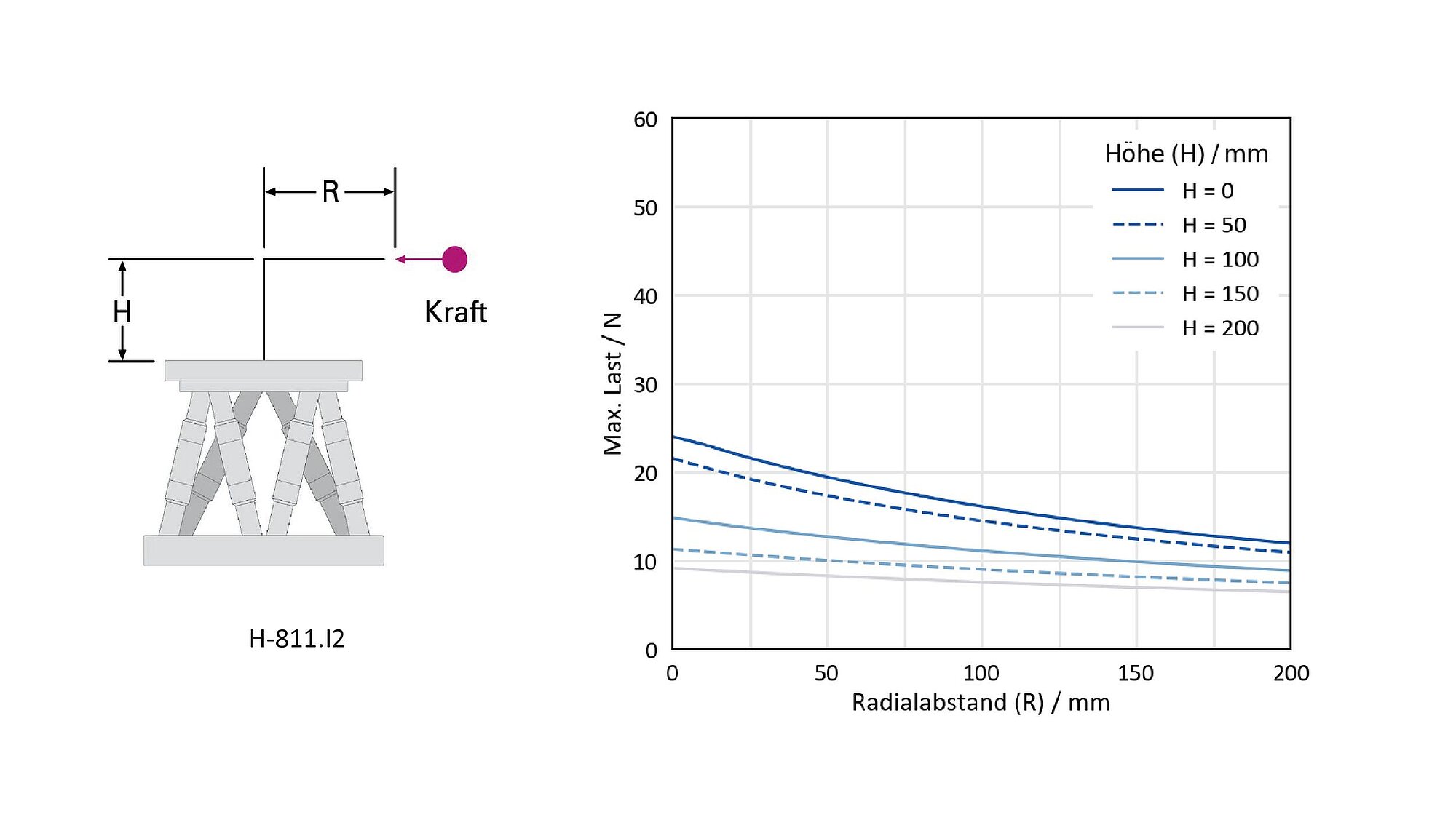
Belastungsgrenzen des H-811.I2 und .I2HS bei vertikaler Montage
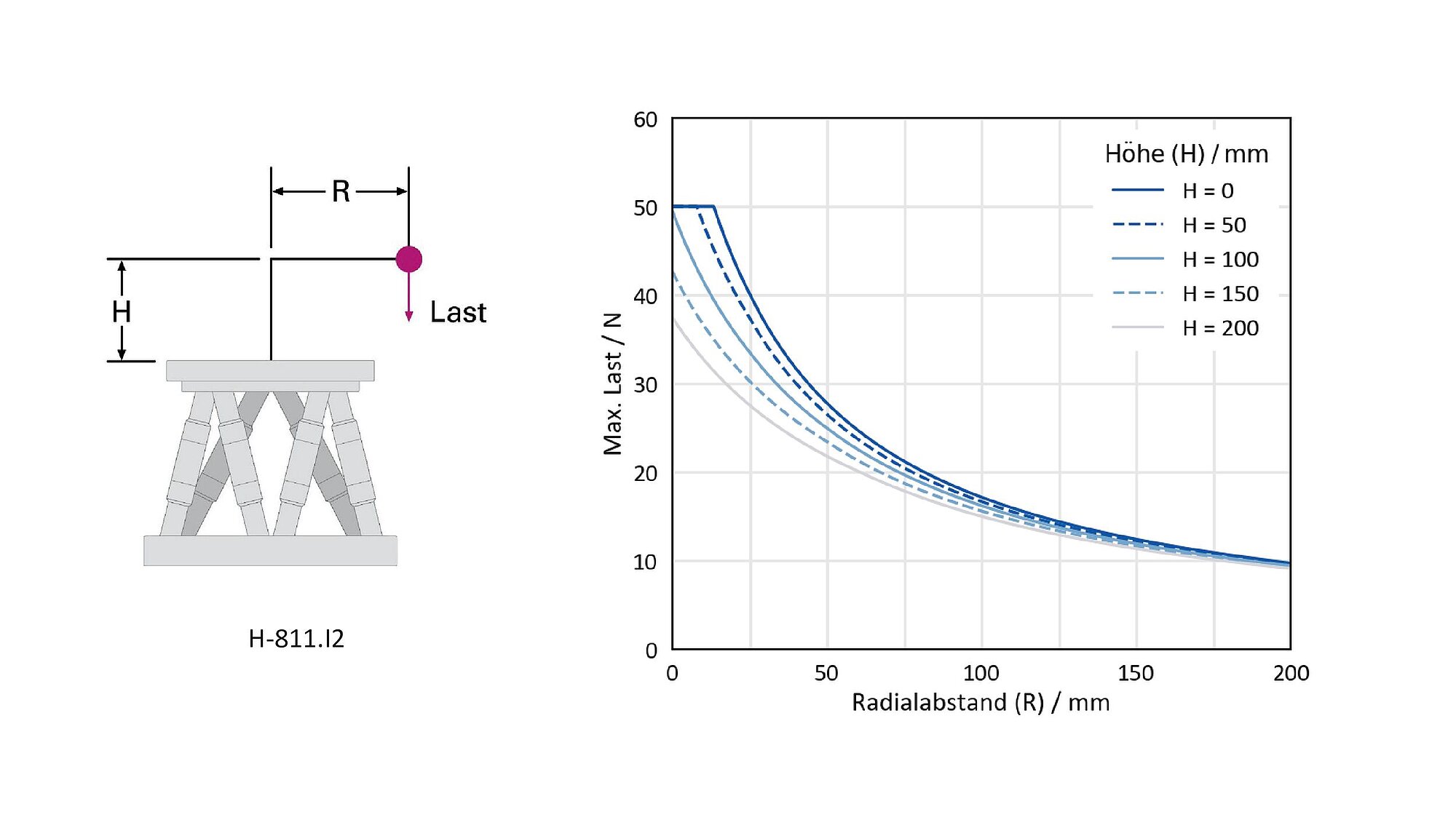
Belastungsgrenzen des H-811.I2 und .I2HS bei Montage unter ungünstigstem Winkel
Maximal zulässige Krafteinwirkung auf den H-811.I2 und .I2HS bei horizontaler Montage
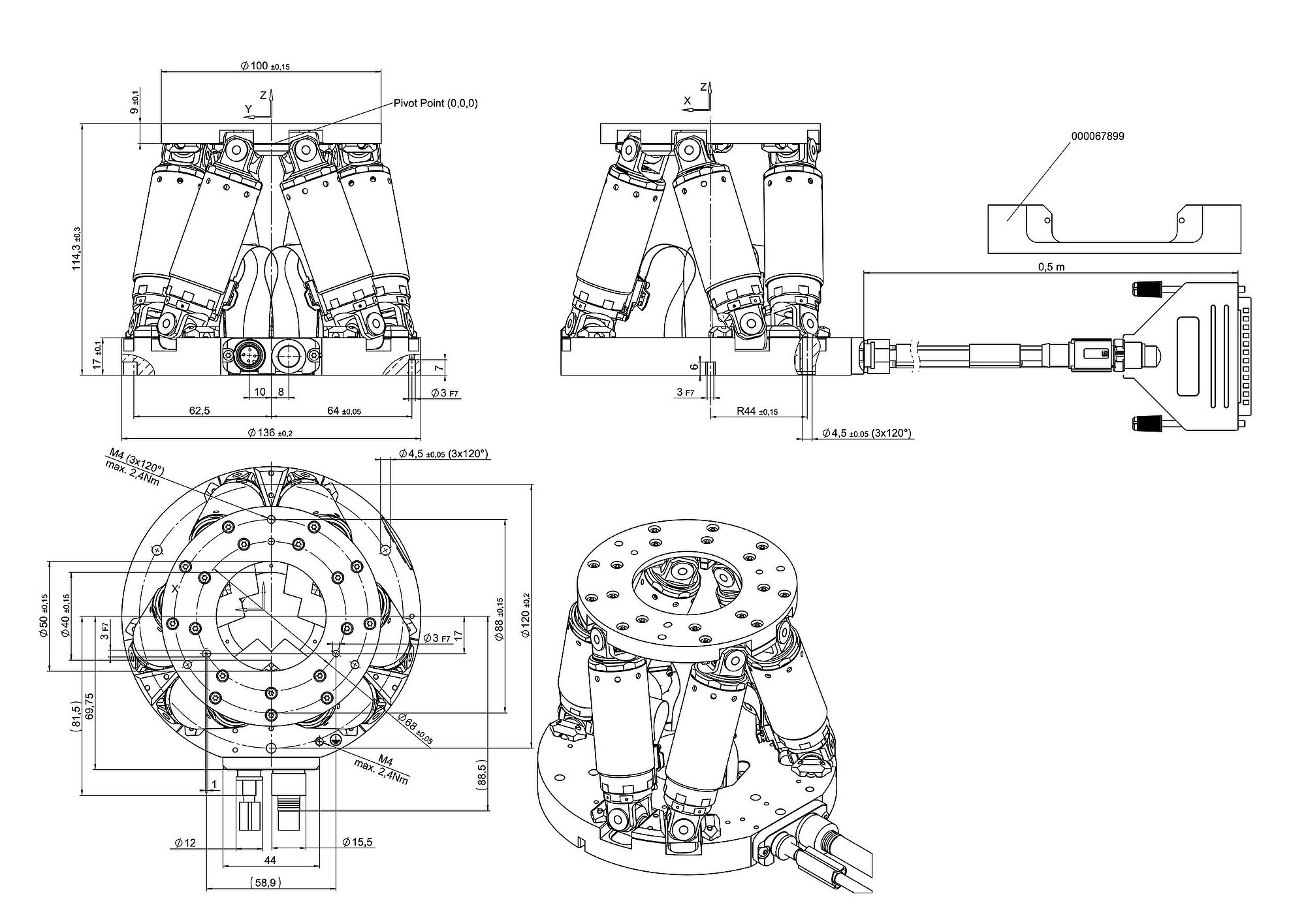
H-811.I2, Abmessungen in mm, bei Nullposition des Nominalstellweges
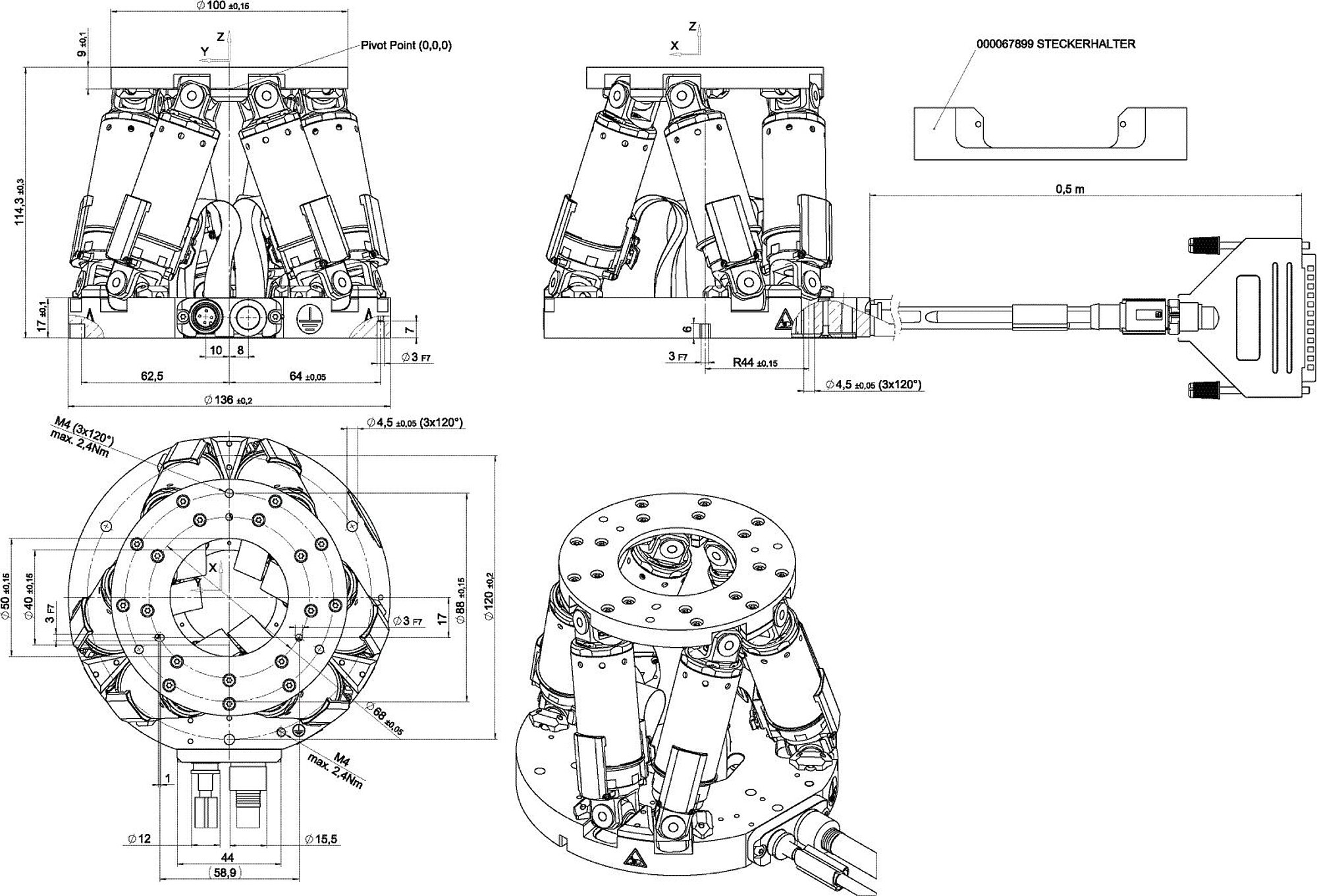
H-811.I2HS, Abmessungen in mm, bei Nullposition des Nominalstellweges
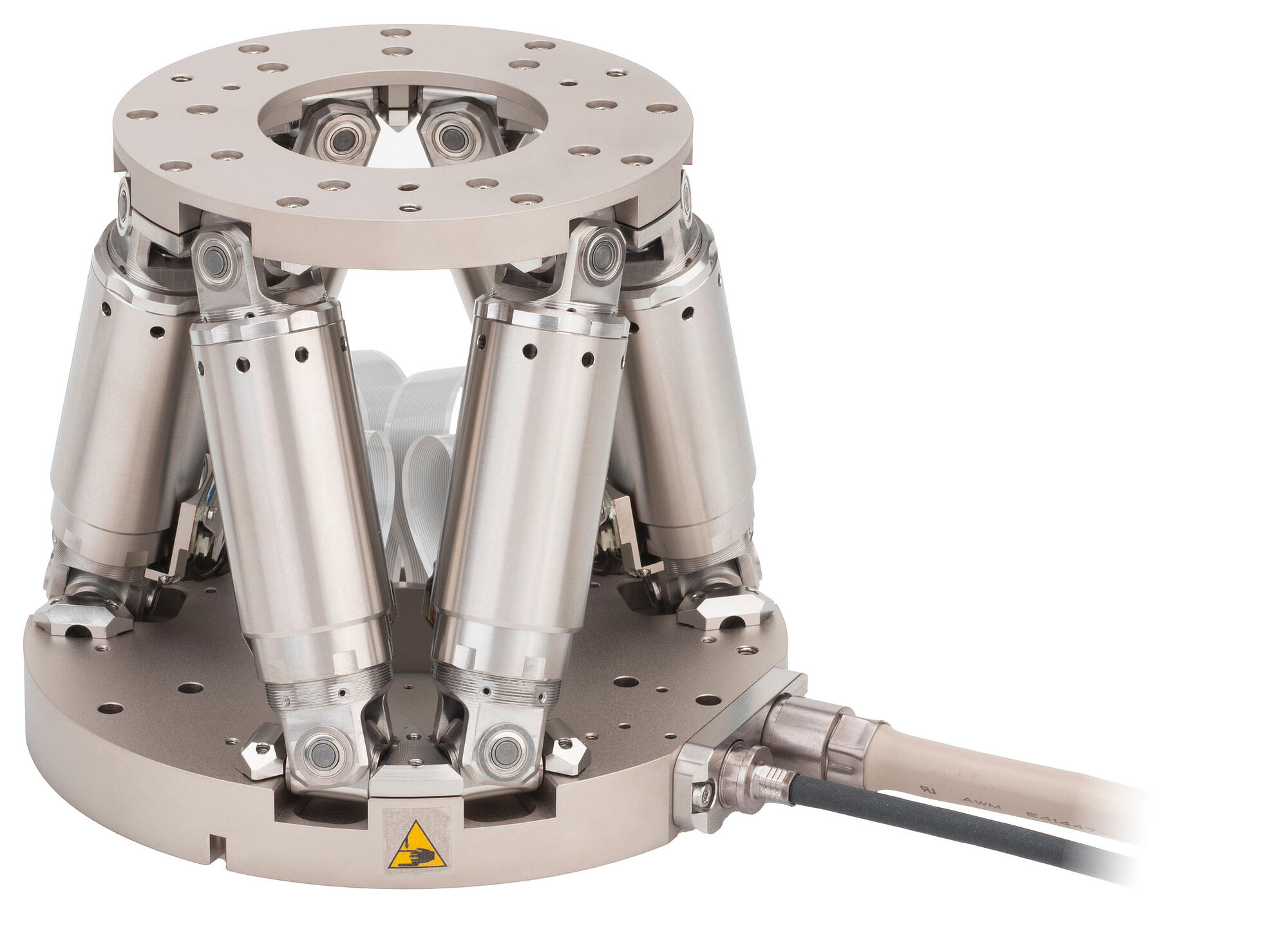
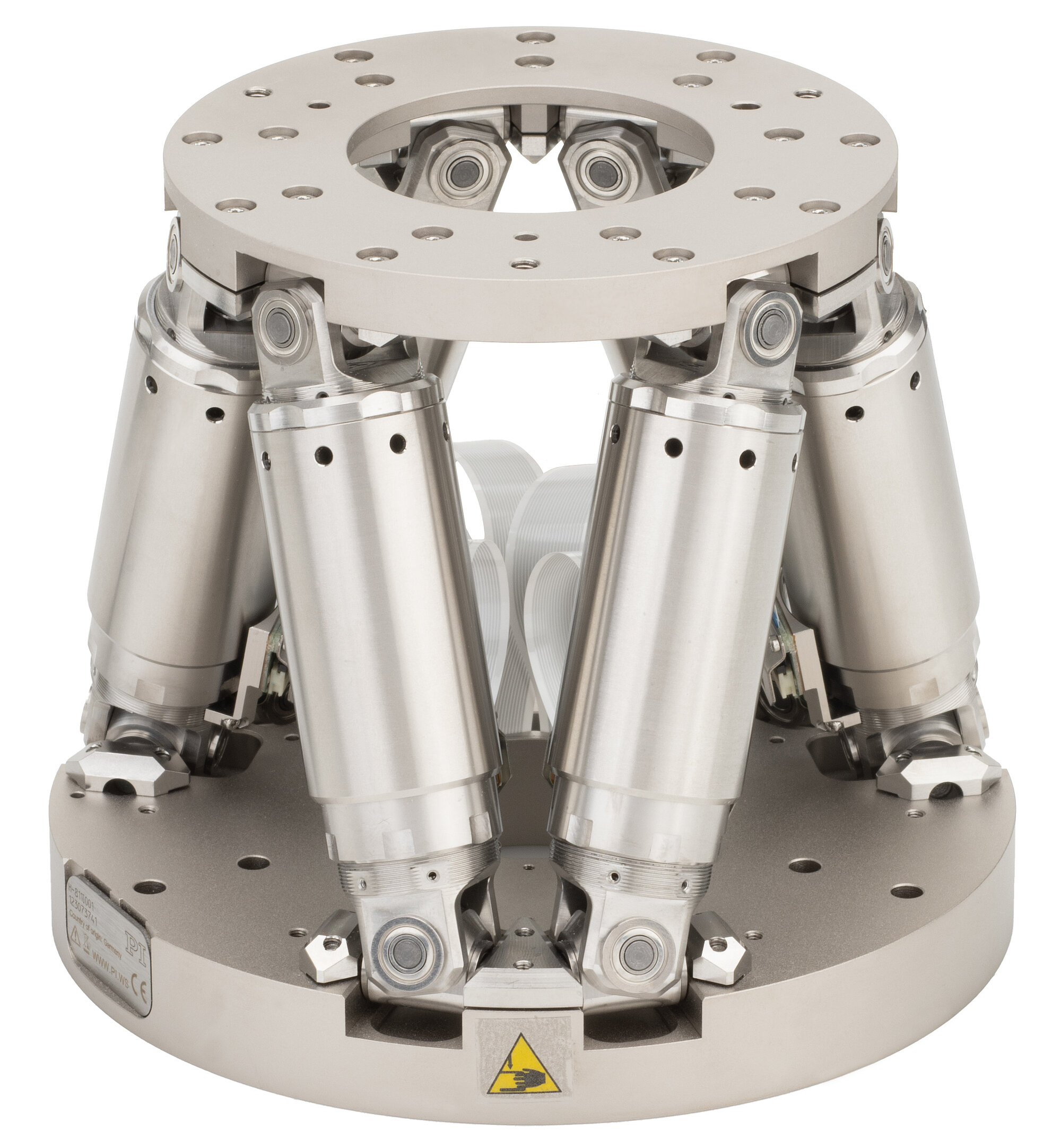
Ansicht des H-811.I2 mit Kabelabgang
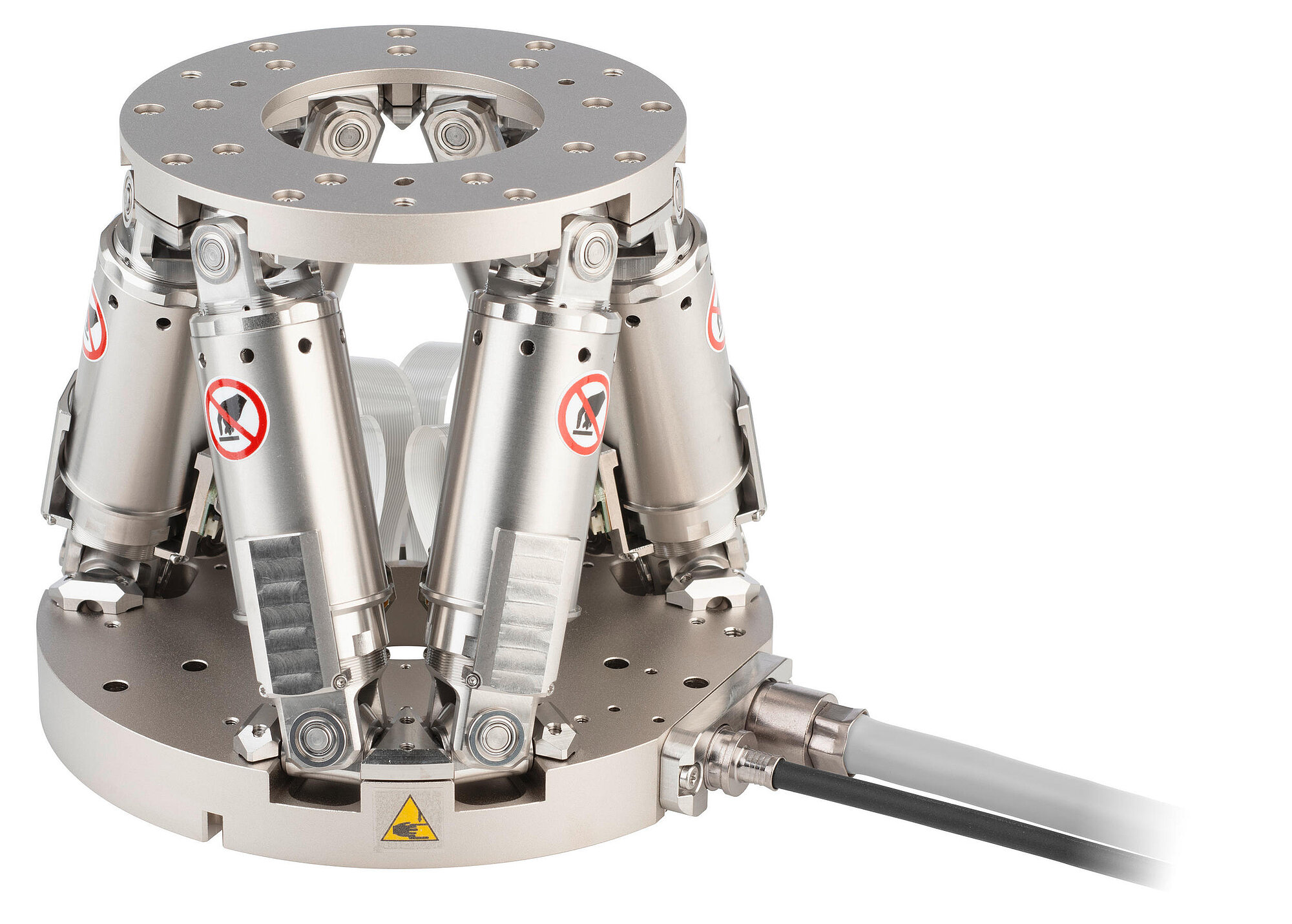
Ansicht des H-811.I2HS mit Kabelabgang











Einsatzgebiete
Aufgrund des kleinen Formfaktors und seiner bewährten Zuverlässigkeit in Anwendungen mit hohen Zyklenzahlen wird der H-811 typischerweise in der Photonik und in der Präzisionsmontage eingesetzt. Hier trägt er wesentlich dazu bei, die Produktivität komplexer Fertigungs- oder Messverfahren zu steigern.
Hohe Dynamik bei äußerster Zuverlässigkeit
Aufgrund des parallelkinematischen Designs kann der Hexapod Bewegungen in 6 Achsen in äußerst kompakter Bauform ausführen. Durch den Einsatz bürstenloser DC-Motoren und durch seine steife mechanische Konstruktion bietet der H-811 die Dynamik, die für aktive Ausrichtungsanwendungen erforderlich ist, selbst wenn externe Störungen (z. B. bei Klebeprozessen) auftreten. Umfangreiche Softwaretools bieten Unterstützung, indem sie die Systemabstimmung vereinfachen und automatische Routinen für die Ausrichtung auf ein externes analoges Steuersignal bereitstellen.
Bewegungssimulation zum Schutz des Gesamtsystems
Die Software PIVirtualMove, die kostenfrei heruntergeladen werden kann, simuliert den Stellweg, die Ausrichtung und die zulässigen Kräfte und Momente des H-811, um eine optimale Systemkonfiguration zu ermöglichen. Dabei wird sowohl der gewählte Drehpunkt als auch der Lastschwerpunkt berücksichtigt.
Work- und Tool-Koordinatensysteme sowie ein Emulationstool sind in dem kostenfreien Softwarepaket enthalten, das zum Lieferumfang des Hexapod-Controllers gehört. Die bereitgestellten Tools helfen, kritische Komponenten wie z. B. optische oder photonische Bauteile zu schützen.
H-811 mit externen mechanischen Anschlägen als optionale Ausstattung
Der auf der bewährten H-811 Plattform basierende Hexapod mit externen mechanischen Anschlägen ist für industrielle Anwendungen optimiert und wird damit den steigenden Anforderungen der Industrie an Robustheit und Zuverlässigkeit gerecht. Die mechanischen Anschläge schützen den Aktor vor mechanischen Beschädigungen, insbesondere während Montage, Handhabung oder Betrieb. Gleichzeitig ermöglichen die mechanischen Anschläge eine nahtlose Integration in die Montageabläufe der Kunden. Das Ergebnis: deutlich reduzierte Ausfallzeiten, weniger Serviceeinsätze und ein insgesamt geringerer Supportaufwand.
| Bewegen | H-811.I2 | H-811.I2HS | Toleranz |
|---|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 17 mm | ± 17 mm | |
| Stellweg in Y | ± 16 mm | ± 16 mm | |
| Stellweg in Z | ± 6,5 mm | ± 6,5 mm | |
| Rotationsbereich in θX | ± 10 ° | ± 10 ° | |
| Rotationsbereich in θY | ± 10 ° | ± 10 ° | |
| Rotationsbereich in θZ | ± 21 ° | ± 21 ° | |
| Maximale Geschwindigkeit in X | 20 mm/s | 20 mm/s | |
| Empfohlene Geschwindigkeit in X | 10 mm/s | 10 mm/s | |
| Maximale Geschwindigkeit in Y | 20 mm/s | 20 mm/s | |
| Empfohlene Geschwindigkeit in Y | 10 mm/s | 10 mm/s | |
| Maximale Geschwindigkeit in Z | 20 mm/s | 20 mm/s | |
| Empfohlene Geschwindigkeit in Z | 10 mm/s | 10 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 500 mrad/s | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 250 mrad/s | 250 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 500 mrad/s | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 250 mrad/s | 250 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 500 mrad/s | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 250 mrad/s | 250 mrad/s | |
| Positionieren | H-811.I2 | H-811.I2HS | Toleranz |
| Kleinste Schrittweite in X | 0,2 µm | 0,2 µm | typ. |
| Kleinste Schrittweite in Y | 0,2 µm | 0,2 µm | typ. |
| Kleinste Schrittweite in Z | 0,08 µm | 0,08 µm | typ. |
| Kleinste Schrittweite in θX | 2,5 µrad | 2,5 µrad | typ. |
| Kleinste Schrittweite in θY | 2,5 µrad | 2,5 µrad | typ. |
| Kleinste Schrittweite in θZ | 5 µrad | 5 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,15 µm | ± 0,15 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,15 µm | ± 0,15 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,06 µm | ± 0,06 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in θX | ± 2 µrad | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θY | ± 2 µrad | ± 2 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 3 µrad | ± 3 µrad | typ. |
| Umkehrspiel in X | 0,2 µm | 0,2 µm | typ. |
| Umkehrspiel in Y | 0,2 µm | 0,2 µm | typ. |
| Umkehrspiel in Z | 0,06 µm | 0,06 µm | typ. |
| Umkehrspiel in θX | 2 µrad | 2 µrad | typ. |
| Umkehrspiel in θY | 2 µrad | 2 µrad | typ. |
| Umkehrspiel in θZ | 4 µrad | 4 µrad | typ. |
| Antriebseigenschaften | H-811.I2 | H-811.I2HS | Toleranz |
| Antriebstyp | Bürstenloser DC-Motor | Bürstenloser DC-Motor | |
| Mechanische Eigenschaften | H-811.I2 | H-811.I2HS | Toleranz |
| Steifigkeit in X | 0,7 N/µm | 0,7 N/µm | |
| Steifigkeit in Y | 0,7 N/µm | 0,7 N/µm | |
| Steifigkeit in Z | 8 N/µm | 8 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 5 kg | 5 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 2,5 kg | 2,5 kg | |
| Maximale Haltekraft, passiv, Grundplatte horizontal | 15 N | 15 N | |
| Maximale Haltekraft, passiv, Grundplatte in beliebiger Ausrichtung | 2,5 N | 2,5 N | |
| Gesamtmasse | 2,2 kg | 2,2 kg | |
| Material | Edelstahl, Aluminium | Edelstahl, Aluminium | |
| Anschlüsse und Umgebung | H-811.I2 | H-811.I2HS | Toleranz |
| Betriebstemperaturbereich | 0 bis 50 °C | 0 bis 50 °C | |
| Anschluss Datenübertragung | HD D-Sub 78 (m) | HD D-Sub 78 (m) | |
| Anschluss Versorgungsspannung | M12 4-polig (m) | M12 4-polig (m) | |
| Kabellänge | 0,5 m | 0,5 m | |
| Kabel-Außendurchmesser Versorgungsspannung | 4,95 mm | 4,95 mm | |
| Minimaler Kabel-Biegeradius bei Festinstallation, Versorgungsspannung | 25 mm | 25 mm | |
| Kabel-Außendurchmesser Datenübertragung | 9,5 mm | 9,5 mm | |
| Minimaler Kabel-Biegeradius bei Festinstallation, Datenübertragung | 95 mm | 95 mm | |
| Empfohlene Controller/Treiber | C-887.5x | C-887.5x |
Die Fixkabel des H-811.I2 und .I2HS haben jeweils eine Länge von 0,5 m.
Die Fixkabel des H-811.I2 und .I2HS sind nicht schleppkettentauglich.
Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
H-811 Miniatur-Hexapoden
Technical Note für das Auspacken des Hexapods
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Miniatur-Hexapod; BLDC-Motor; 5 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; 0,5 m Kabellänge. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Miniatur-Hexapod; BLDC-Motor; 5 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; 0,5 m Kabellänge; Beine mit mechanischem Anschlag. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
In vielen Anwendungsfeldern gibt es die Anforderung, Komponenten bis auf Nanometer genau auszurichten. Optische Komponenten wie z.B. die Linsen oder Linsenbaugruppen in kleinen Kameras, ebenso wie der CCD Chip selbst, müssen mit zunehmender Genauigkeit positioniert werden.

EtherCAT Netzwerke integrieren PI-Controller als Slave. ACS Motion Controller können als EtherCAT Master oder untergeordnet in einer bestehenden Busarchitektur eingebunden werden.

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.
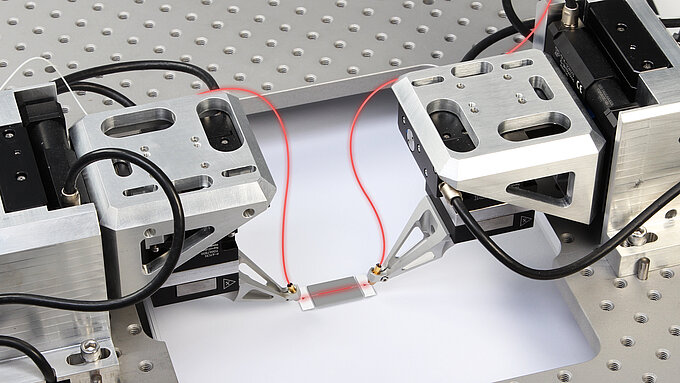
Ausrichtung ist der wichtigste Kostenfaktor für Durchsatz und Produktionskosten bei Prüfung, Aufbau und Verbindung von photonischen Bauteilen. Maximale Leistung erfordert die optimale Kombination aus Genauigkeit, Geschwindigkeit und intelligenter Automatisierung.

Investigation of the structural properties of thin films under high-vacuum conditions.

At the X-ray light source PETRA III at the DESY research center in Hamburg operates the Imaging Beamline P05.

At Diamond Light Source, UK, beamline I07 is a high-resolution X-ray diffraction beamline dedicated to investigate the structure of surfaces and interfaces.

Mikromontage verlangt heute nach präzisen Positioniersystemen, die möglichst kompakt sein sollen, um sich gut in die Fertigungseinheiten zu integrieren.

Flexibilität in der Produktion: Durch Hexapod-Systeme kann die benötigte Installationsfläche für die Robotik erheblich reduziert werden.