H-860.S2H
Hochdynamischer Motion-Hexapod; Voice-Coil-Antrieb; 1 kg Nutzlast; 250 mm/s maximale Geschwindigkeit; Festkörpergelenke; Hochleistungsnetzteil; 3 m Kabelsatz
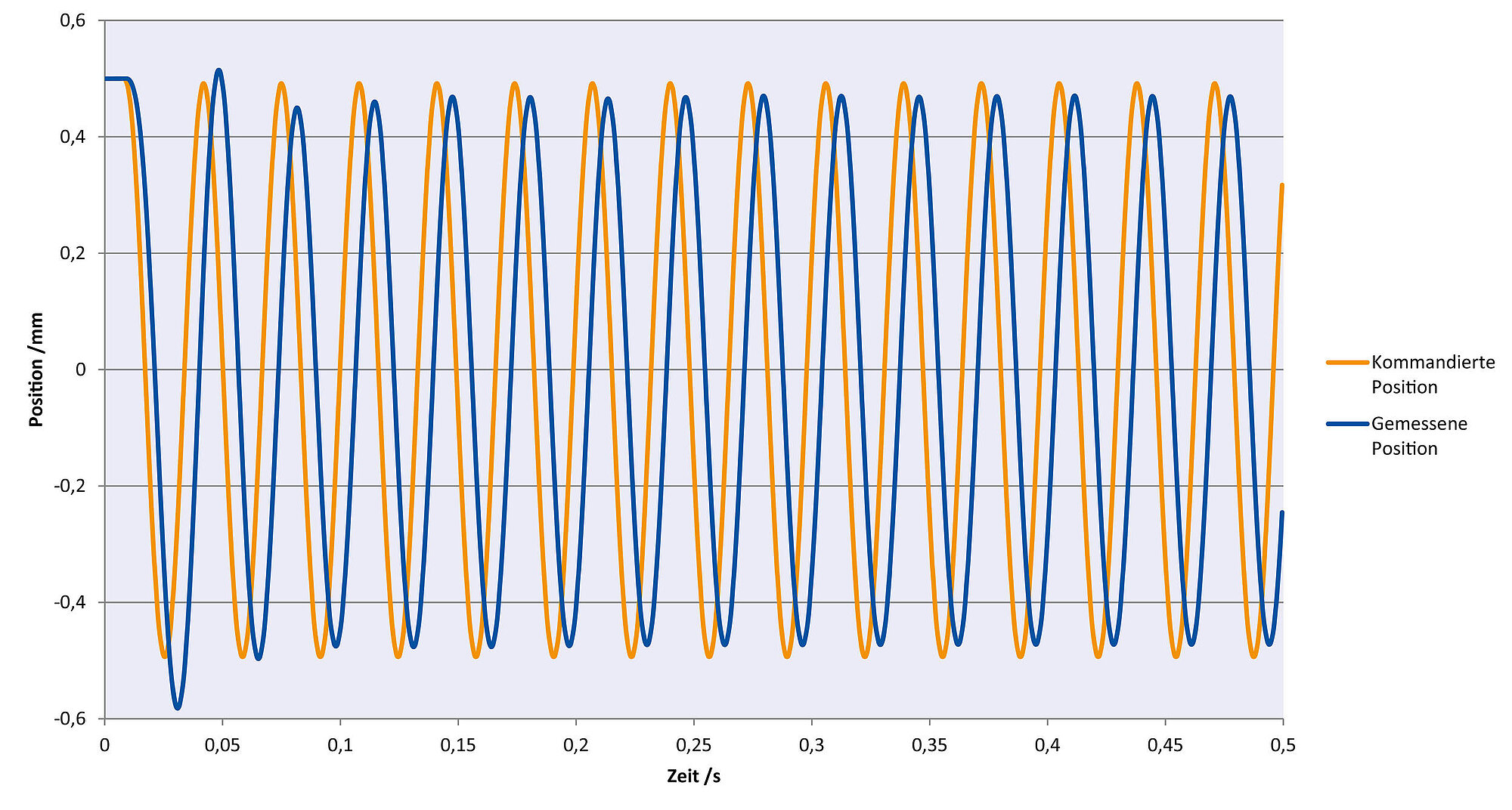
Sinusförmige Schwingung mit 30 Hz in Z. Präzise folgt der H-860 der vorgegebenen Bahnkurve.
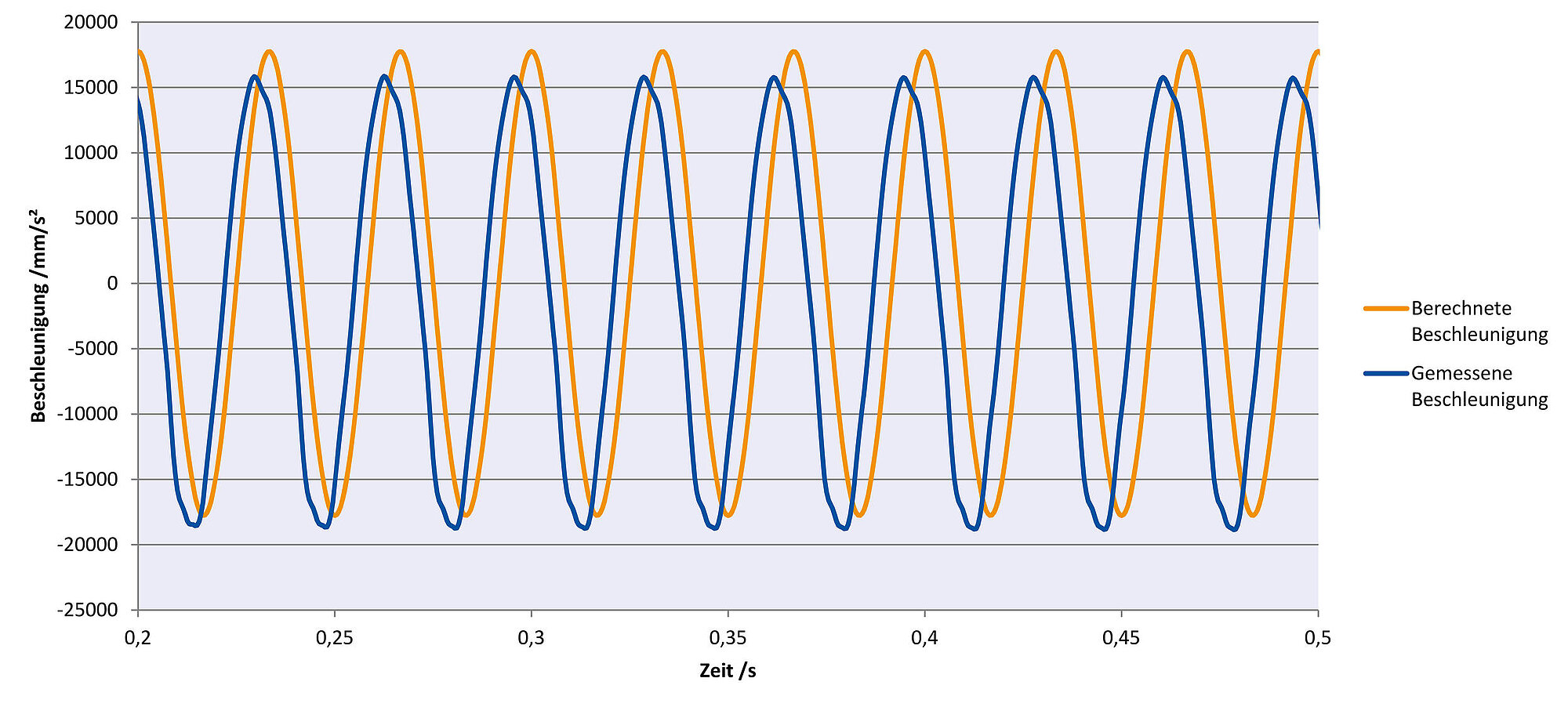
Sinusförmige Schwingung mit 30 Hz in Z, Amplitude 0,5 mm. Dank der hohen Dynamik und geringen bewegten Massen kann der H-860 präzise Beschleunigungen simulieren. Die Beschleunigung wurde mit einem externen Beschleunigungssensor direkt an der Bewegungsplattform in Z-Richtung gemessen.
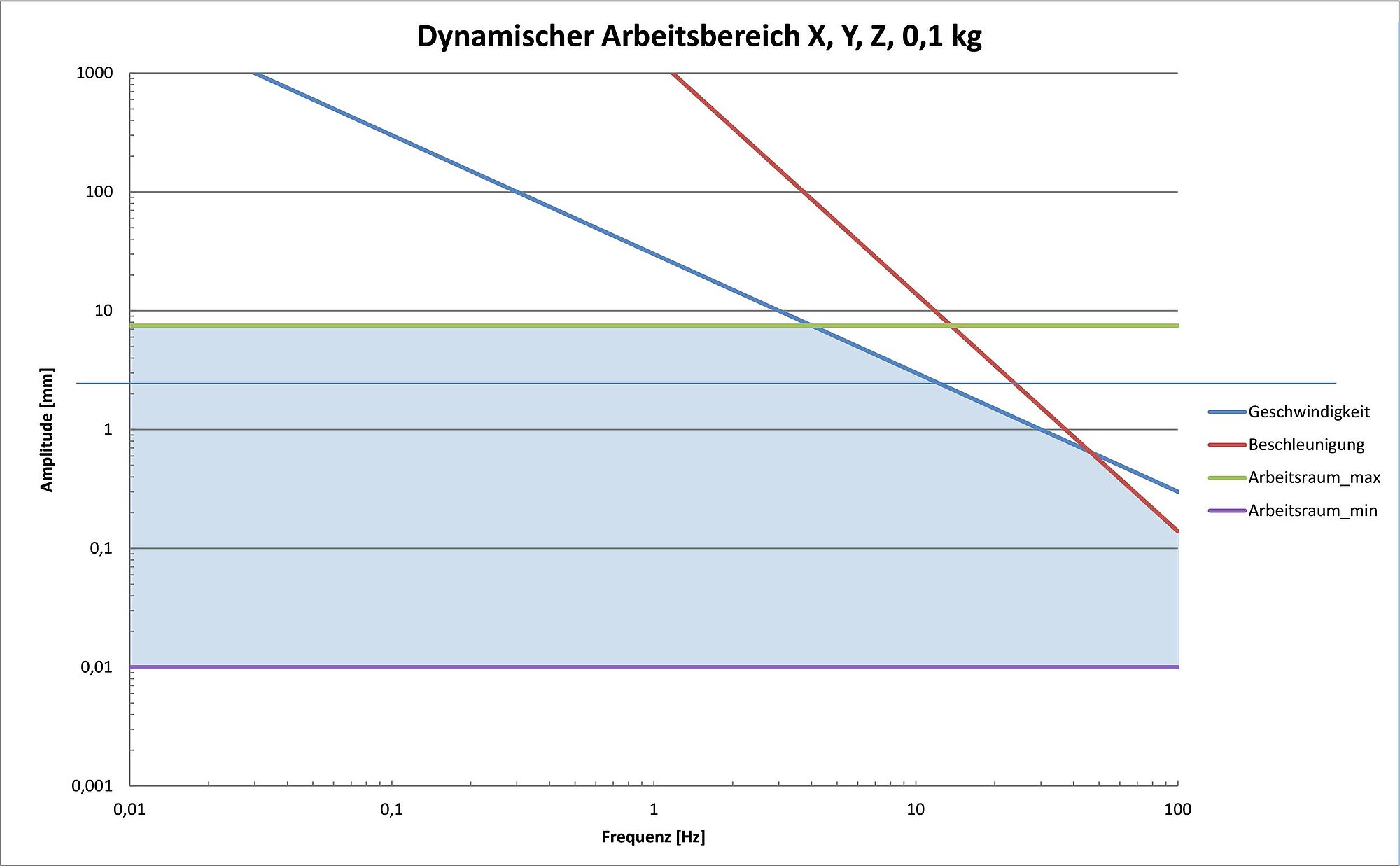
Dynamischer Arbeitsbereich des H-860.S2H, X, Y und Z, 0,1 kg
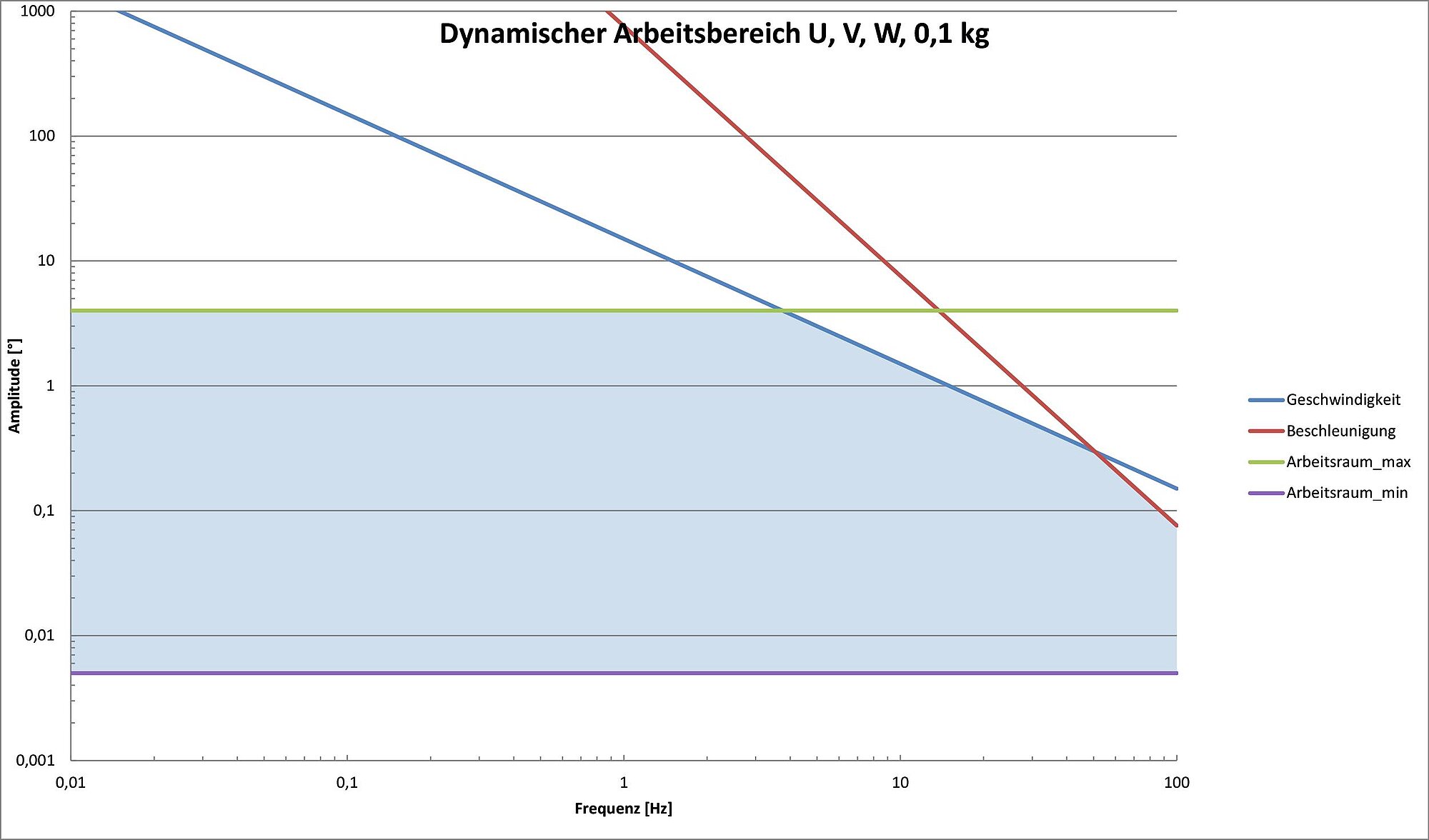
Dynamischer Arbeitsbereich des H-860.S2H, U (ƟX), V (ƟY) und W (ƟZ), 0,1 kg
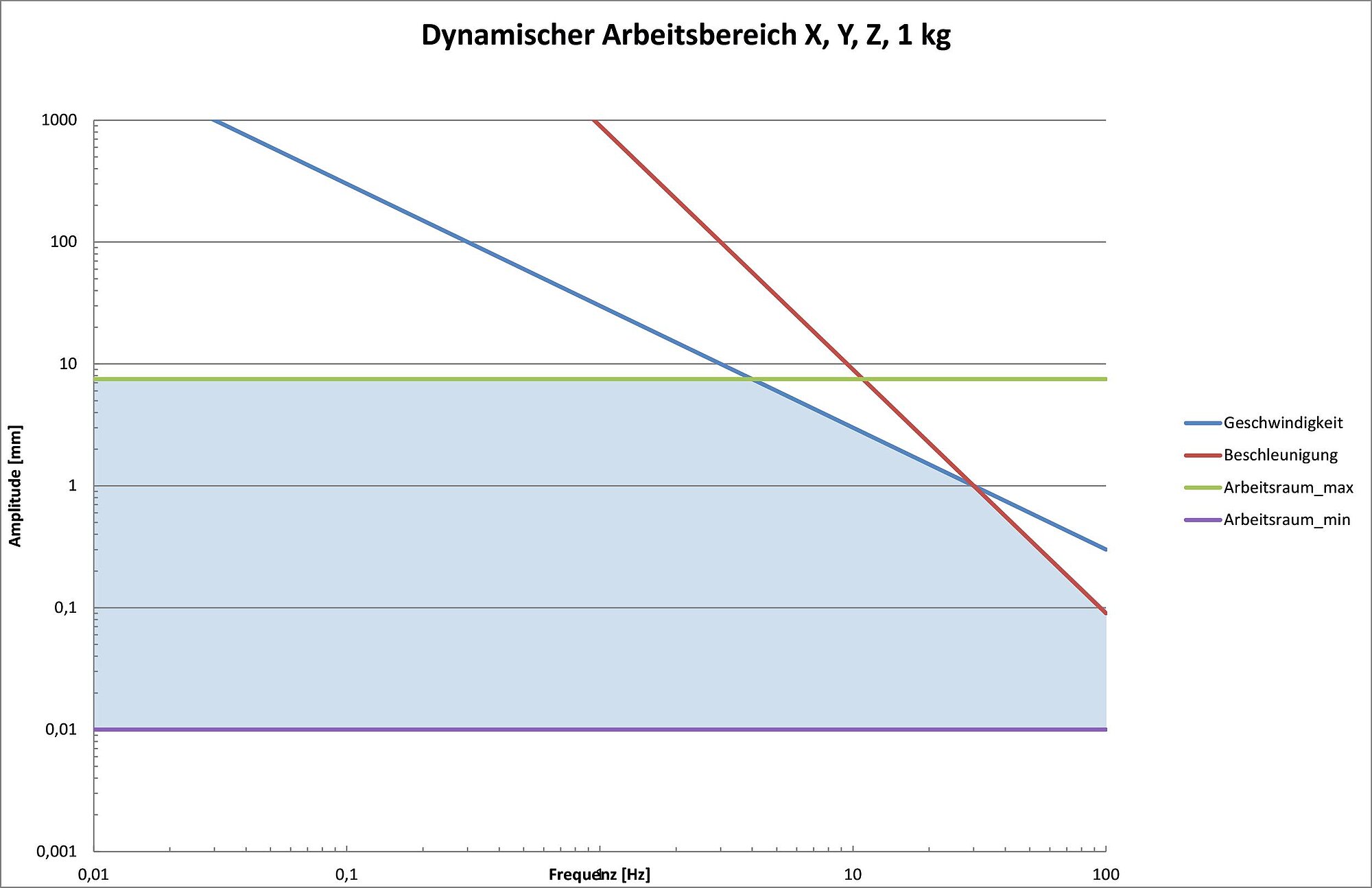
Dynamischer Arbeitsbereich des H-860.S2H, X, Y und Z, 1 kg
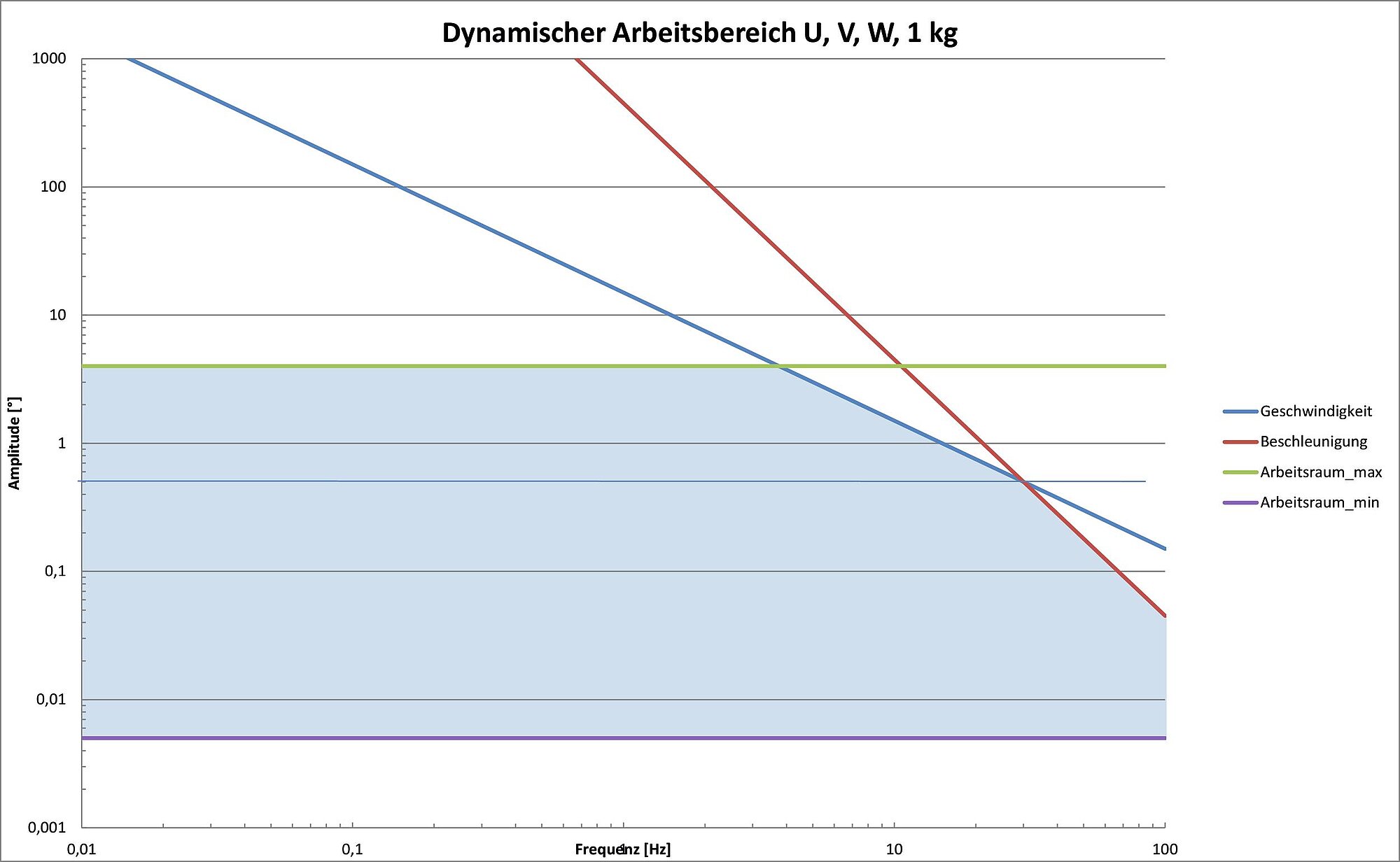
Dynamischer Arbeitsbereich des H-860.S2H, U (ƟX), V (ƟY) und W (ƟZ), 1 kg
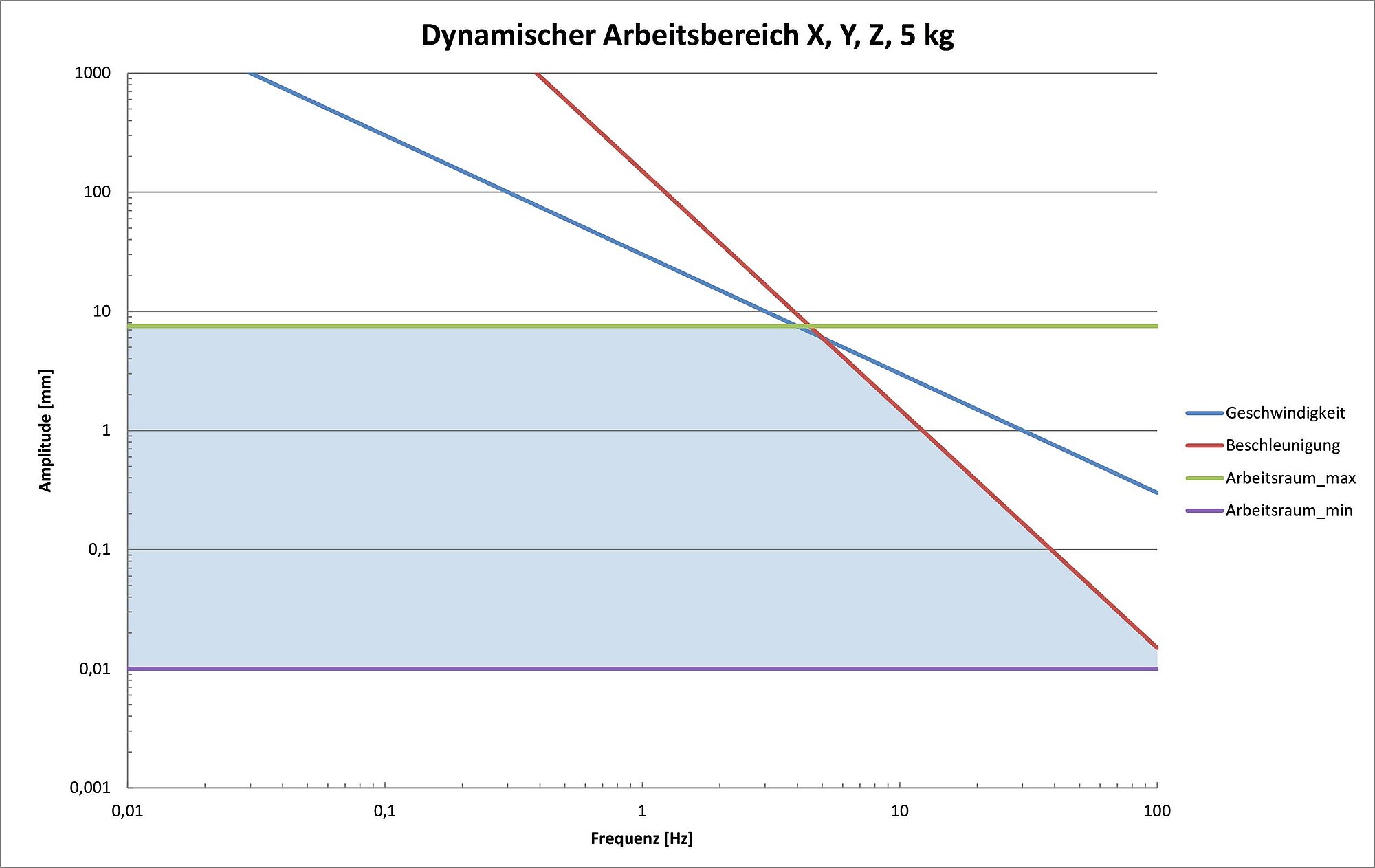
Dynamischer Arbeitsbereich des H-860.S2H, X, Y und Z, 5 kg
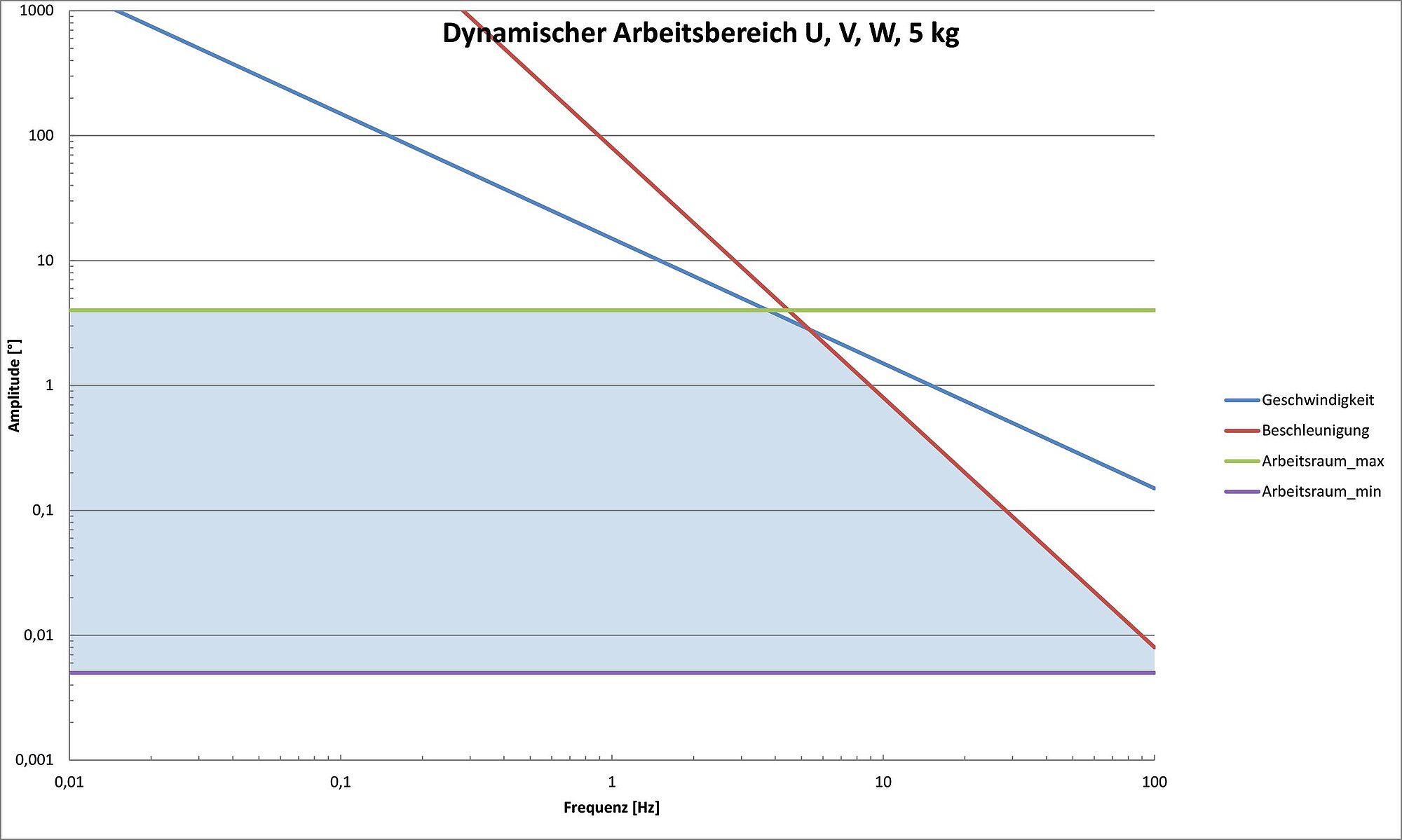
Dynamischer Arbeitsbereich des H-860.S2H, U (ƟX), V (ƟY) und W (ƟZ), 5 kg
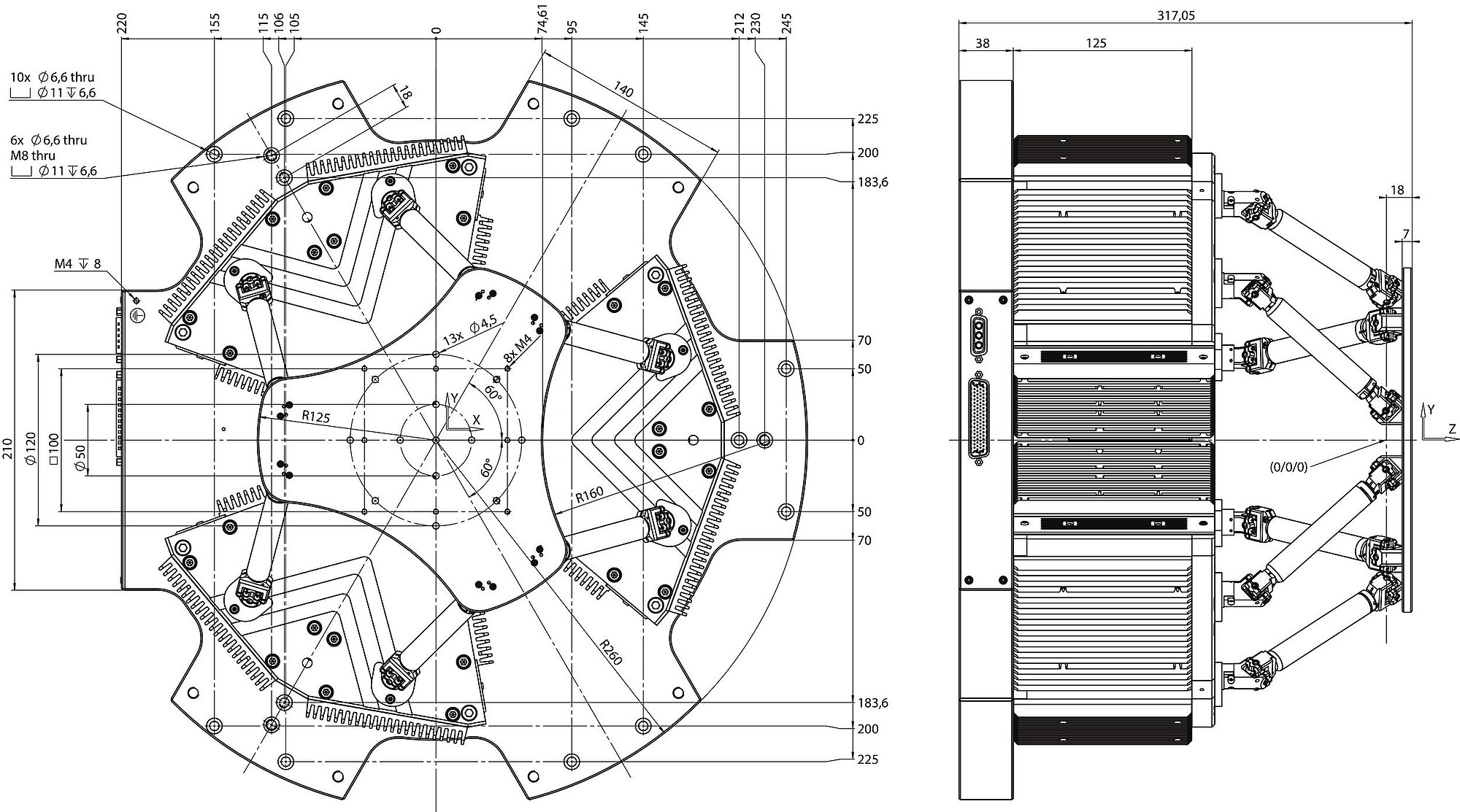
H-860.S2H, Abmessungen in mm, bei Nullposition des Nominalstellweges










Durch seine hervorragenden dynamischen Eigenschaften ist der H-860 ideal geeignet für die Bewegungssimulation. Der Hexapod wird für Testsysteme z. B. für Bildstabilisierung in Kameras und mobilen Endgeräten eingesetzt. Weitere Einsatzgebiete sind die Qualitätssicherung von Kameratestsystemen und Bildstabilisierungssoftware, Schwingungssimulation, Eye Tracking, Simulation von menschlicher und künstlicher Bewegung.
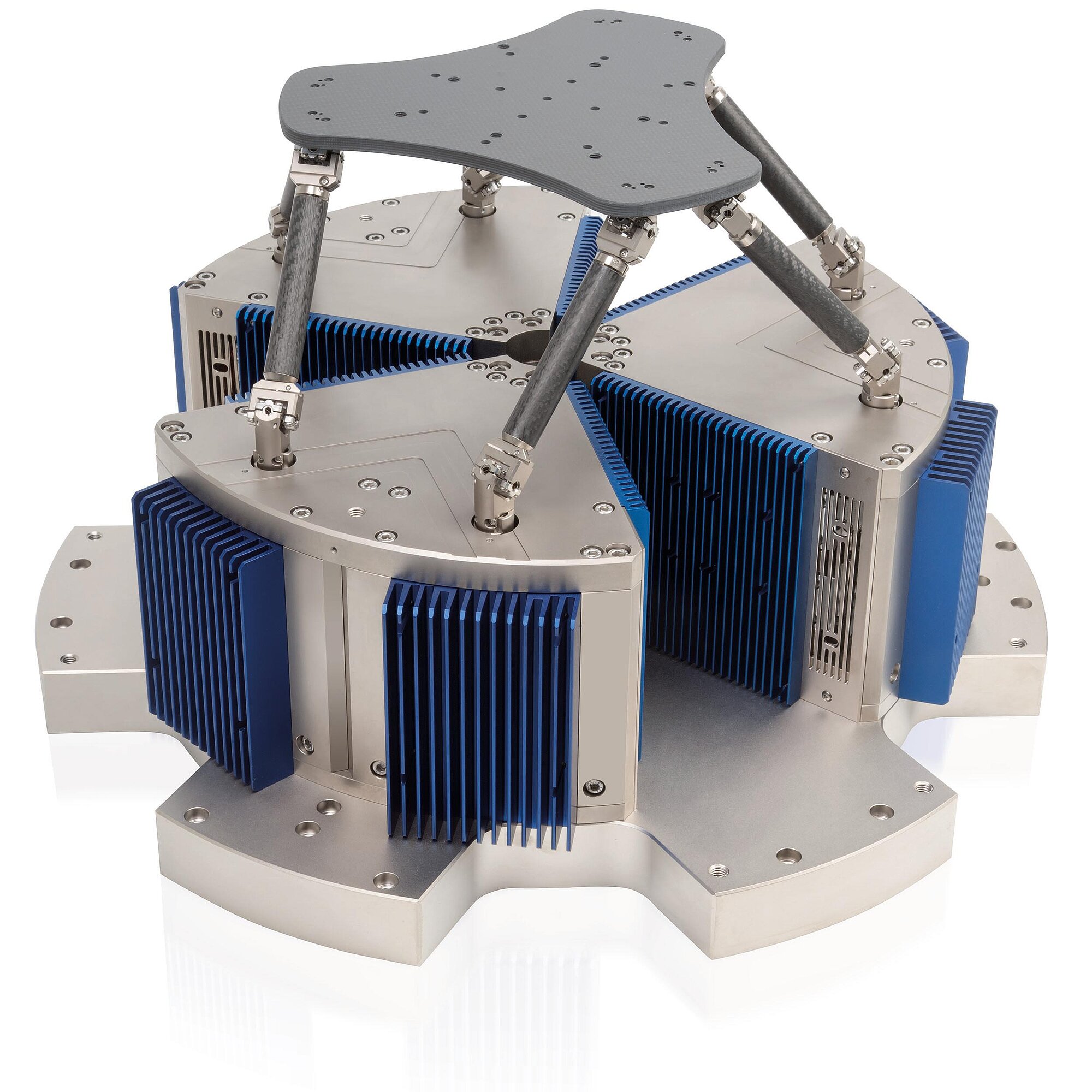
Das reibungsfreie Antriebsdesign basiert auf Voice-Coil-Antrieben und Festkörperführungen. Streben und Plattform bestehen aus Carbonfaser für minimale bewegte Masse und Trägheit.
Parallelkinematisches 6-Achsen-System
Parallelkinematischer Aufbau für 6 Freiheitsgrade, dadurch wesentlich kompakter und steifer als Seriellkinematiksysteme, keine bewegten Kabel. Präzises Abfahren vordefinierter Trajektorien mit hoher Bahntreue: Sinuskurven und frei definierbare Bahnen.
PIMag® Voice-Coil-Antrieb
Voice-Coil-Antriebe bestehen aus zwei wesentlichen Komponenten: einem Dauermagneten und einer Spule, die sich im Luftspalt des Magnetfelds befindet. Voice-Coil-Antriebe eignen sich durch ihr geringes Gewicht und das reibungsfreie Antriebsprinzip sehr gut für Anwendungen, die hohe Dynamik und hohe Geschwindigkeiten bei begrenzten Stellwegen erfordern. Hohe Scanfrequenzen und präzise Positionierung sind mit diesen Antrieben ebenfalls möglich, da sie frei von Hystereseeffekten sind.
PIVirtualMove
Die Simulationssoftware simuliert die Grenzen des Arbeitsraums und der Nutzlast eines Hexapoden. Damit kann bereits vor einer Kaufentscheidung überprüft werden, ob ein bestimmtes Hexapod-Modell die auftretenden Lasten, Kräfte und Momente in einer Anwendung aufnehmen kann. Das Simulationstool berücksichtigt dazu die Lage und die Bewegung des Hexapoden, sowie die Position des Pivotpunkts und verschiedene Bezugskoordinatensysteme.
| Bewegen | H-860.S2H | Toleranz |
|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 7,5 mm | |
| Stellweg in Y | ± 7,5 mm | |
| Stellweg in Z | ± 7,5 mm | |
| Rotationsbereich in θX | ± 4 ° | |
| Rotationsbereich in θY | ± 4 ° | |
| Rotationsbereich in θZ | ± 4 ° | |
| Maximale Geschwindigkeit in X | 250 mm/s | |
| Empfohlene Geschwindigkeit in X | 20 mm/s | |
| Maximale Geschwindigkeit in Y | 250 mm/s | |
| Empfohlene Geschwindigkeit in Y | 20 mm/s | |
| Maximale Geschwindigkeit in Z | 250 mm/s | |
| Empfohlene Geschwindigkeit in Z | 20 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 125 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 10 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 125 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 10 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 125 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 10 mrad/s | |
| Amplitude-Frequenz-Produkt in X | 30 mm·Hz | |
| Amplitude-Frequenz-Produkt in Y | 30 mm·Hz | |
| Amplitude-Frequenz-Produkt in Z | 30 mm·Hz | |
| Amplitude-Frequenz-Produkt in θX | 15 °·Hz | |
| Amplitude-Frequenz-Produkt in θY | 15 °·Hz | |
| Amplitude-Frequenz-Produkt in θZ | 15 °·Hz | |
| Amplitudenfehler | 10 % | max. |
| Phasenfehler | 60 ° | max. |
| Maximale Frequenz | 30 Hz | |
| Positionieren | H-860.S2H | Toleranz |
| Kleinste Schrittweite in X | 1 µm | typ. |
| Kleinste Schrittweite in Y | 1 µm | typ. |
| Kleinste Schrittweite in Z | 1 µm | typ. |
| Kleinste Schrittweite in θX | 9 µrad | typ. |
| Kleinste Schrittweite in θY | 9 µrad | typ. |
| Kleinste Schrittweite in θZ | 9 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,5 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,5 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,5 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in θX | ± 9 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θY | ± 9 µrad | typ. |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 9 µrad | typ. |
| Umkehrspiel in X | 0,2 µm | typ. |
| Umkehrspiel in Y | 0,2 µm | typ. |
| Umkehrspiel in Z | 0,06 µm | typ. |
| Umkehrspiel in θX | 4 µrad | typ. |
| Umkehrspiel in θY | 4 µrad | typ. |
| Umkehrspiel in θZ | 4 µrad | typ. |
| Integrierter Sensor | Absoluter Linearencoder | |
| Antriebseigenschaften | H-860.S2H | Toleranz |
| Antriebstyp | Voice-Coil | |
| Maximale Leistungsaufnahme | 300 W | |
| Mechanische Eigenschaften | H-860.S2H | Toleranz |
| Steifigkeit in X | 0,7 N/µm | |
| Steifigkeit in Y | 0,7 N/µm | |
| Steifigkeit in Z | 8 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 1 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 1 kg | |
| Gesamtmasse | 30 kg | |
| Material | Edelstahl, Aluminium | |
| Anschlüsse und Umgebung | H-860.S2H | Toleranz |
| Betriebstemperaturbereich | 0 bis 50 °C | |
| Anschluss | HD D-Sub 78 (m) | |
| Empfohlene Controller/Treiber | C-887.5x |
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
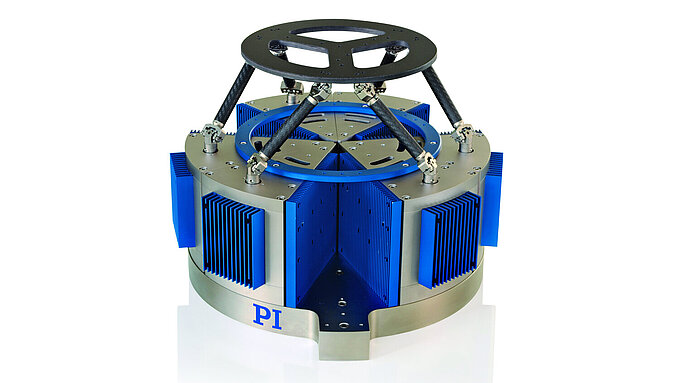
H-860 Hexapod mit magnetischem Direktantrieb für hohe Geschwindigkeit
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Hochdynamischer Motion-Hexapod; Voice-Coil-Antrieb; 1 kg Nutzlast; 250 mm/s maximale Geschwindigkeit; Festkörpergelenke; Hochleistungsnetzteil; 3 m Kabelsatz
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
Bewegungssimulatoren haben höhere Anforderungen an die Dynamik der Bewegung (Shaker).

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.

Magnetische Direktantriebe bieten vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen.








