|
Aktive Achsen
|
X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ
|
|
|
Stellweg in X
|
± 17 mm
|
|
|
Stellweg in Y
|
± 16 mm
|
|
|
Stellweg in Z
|
± 6,5 mm
|
|
|
Rotationsbereich in θX
|
± 10 °
|
|
|
Rotationsbereich in θY
|
± 10 °
|
|
|
Rotationsbereich in θZ
|
± 21 °
|
|
|
Maximale Geschwindigkeit in X
|
10 mm/s
|
|
|
Empfohlene Geschwindigkeit in X
|
5 mm/s
|
|
|
Maximale Geschwindigkeit in Y
|
10 mm/s
|
|
|
Empfohlene Geschwindigkeit in Y
|
5 mm/s
|
|
|
Maximale Geschwindigkeit in Z
|
10 mm/s
|
|
|
Empfohlene Geschwindigkeit in Z
|
5 mm/s
|
|
|
Maximale Winkelgeschwindigkeit in θX
|
250 mrad/s
|
|
|
Empfohlene Winkelgeschwindigkeit in θX
|
120 mrad/s
|
|
|
Maximale Winkelgeschwindigkeit in θY
|
250 mrad/s
|
|
|
Empfohlene Winkelgeschwindigkeit in θY
|
120 mrad/s
|
|
|
Maximale Winkelgeschwindigkeit in θZ
|
250 mrad/s
|
|
|
Empfohlene Winkelgeschwindigkeit in θZ
|
120 mrad/s
|
|
|
Positionieren
|
H-811.I2V
|
Toleranz
|
|
Kleinste Schrittweite in X
|
0,2 µm
|
typ.
|
|
Kleinste Schrittweite in Y
|
0,2 µm
|
typ.
|
|
Kleinste Schrittweite in Z
|
0,08 µm
|
typ.
|
|
Kleinste Schrittweite in θX
|
2,5 µrad
|
typ.
|
|
Kleinste Schrittweite in θY
|
2,5 µrad
|
typ.
|
|
Kleinste Schrittweite in θZ
|
5 µrad
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in X
|
± 0,15 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in Y
|
± 0,15 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in Z
|
± 0,06 µm
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in θX
|
± 2 µrad
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in θY
|
± 2 µrad
|
typ.
|
|
Unidirektionale Wiederholgenauigkeit in θZ
|
± 3 µrad
|
typ.
|
|
Umkehrspiel in X
|
0,2 µm
|
typ.
|
|
Umkehrspiel in Y
|
0,2 µm
|
typ.
|
|
Umkehrspiel in Z
|
0,06 µm
|
typ.
|
|
Umkehrspiel in θX
|
2 µrad
|
typ.
|
|
Umkehrspiel in θY
|
2 µrad
|
typ.
|
|
Umkehrspiel in θZ
|
4 µrad
|
typ.
|
|
Antriebseigenschaften
|
H-811.I2V
|
Toleranz
|
|
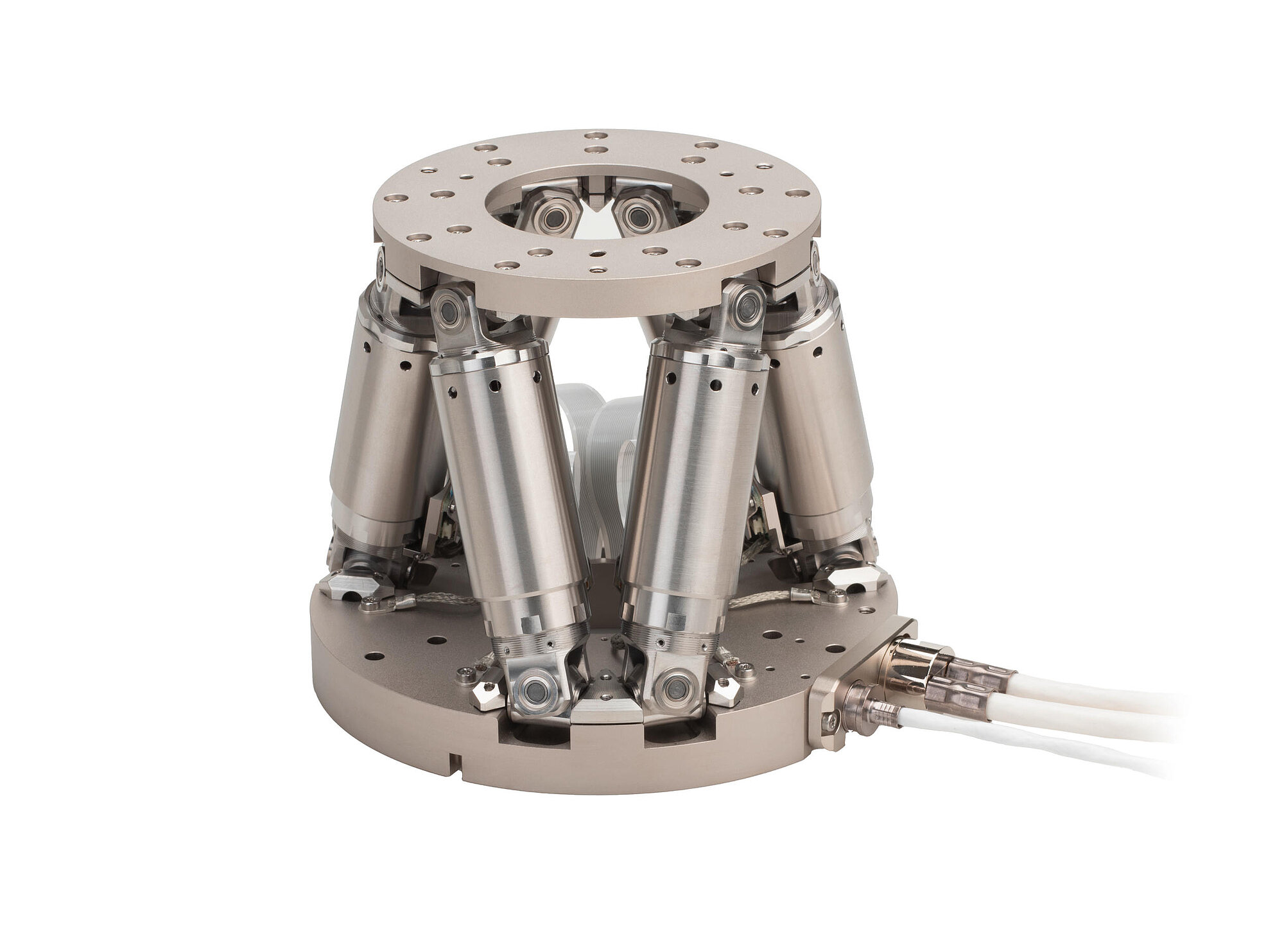
Antriebstyp
|
Bürstenloser DC-Motor
|
|
|
Mechanische Eigenschaften
|
H-811.I2V
|
Toleranz
|
|
Steifigkeit in X
|
0,7 N/µm
|
|
|
Steifigkeit in Y
|
0,7 N/µm
|
|
|
Steifigkeit in Z
|
8 N/µm
|
|
|
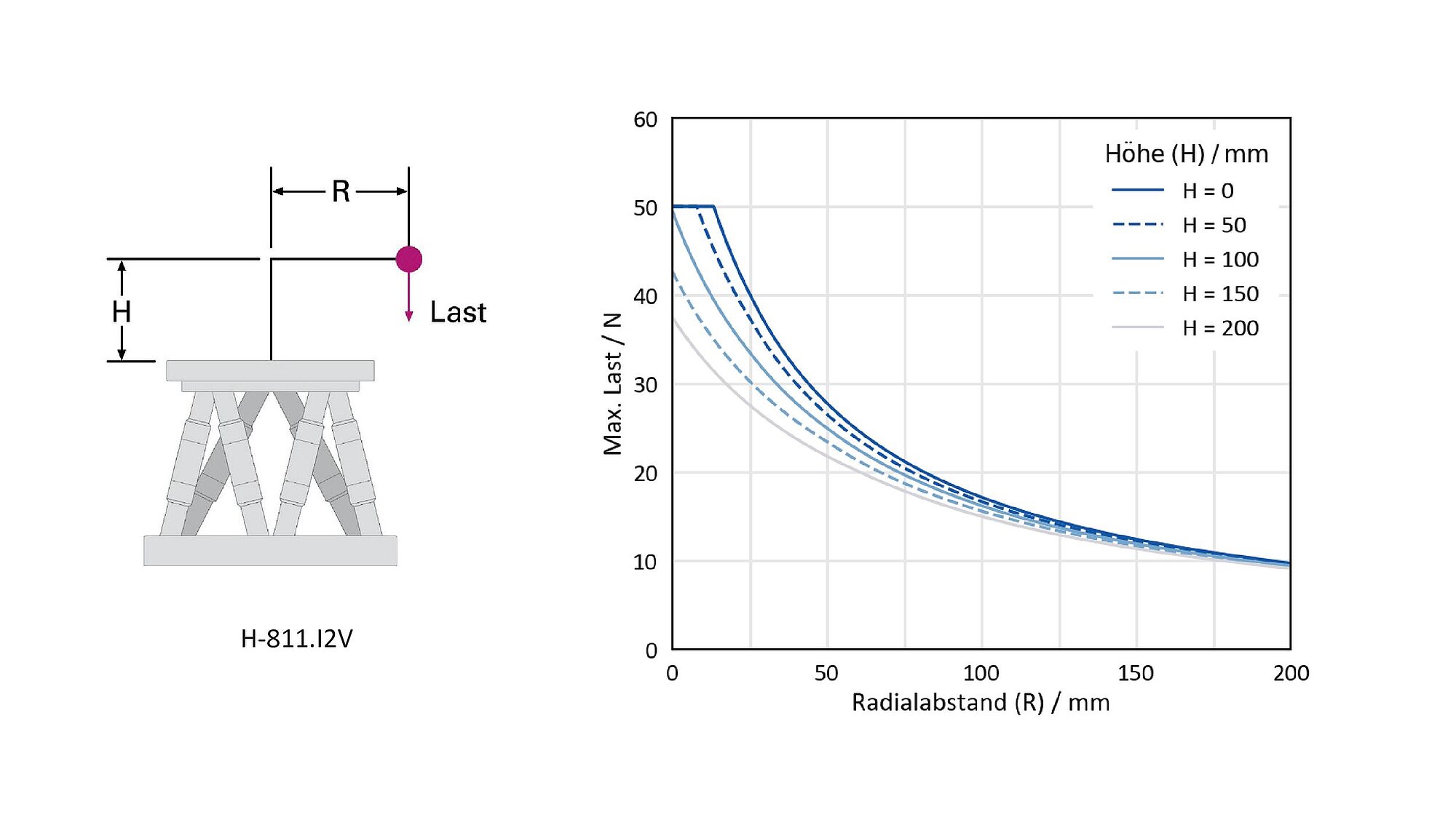
Maximale Nutzlast, Grundplatte horizontal
|
5 kg
|
|
|
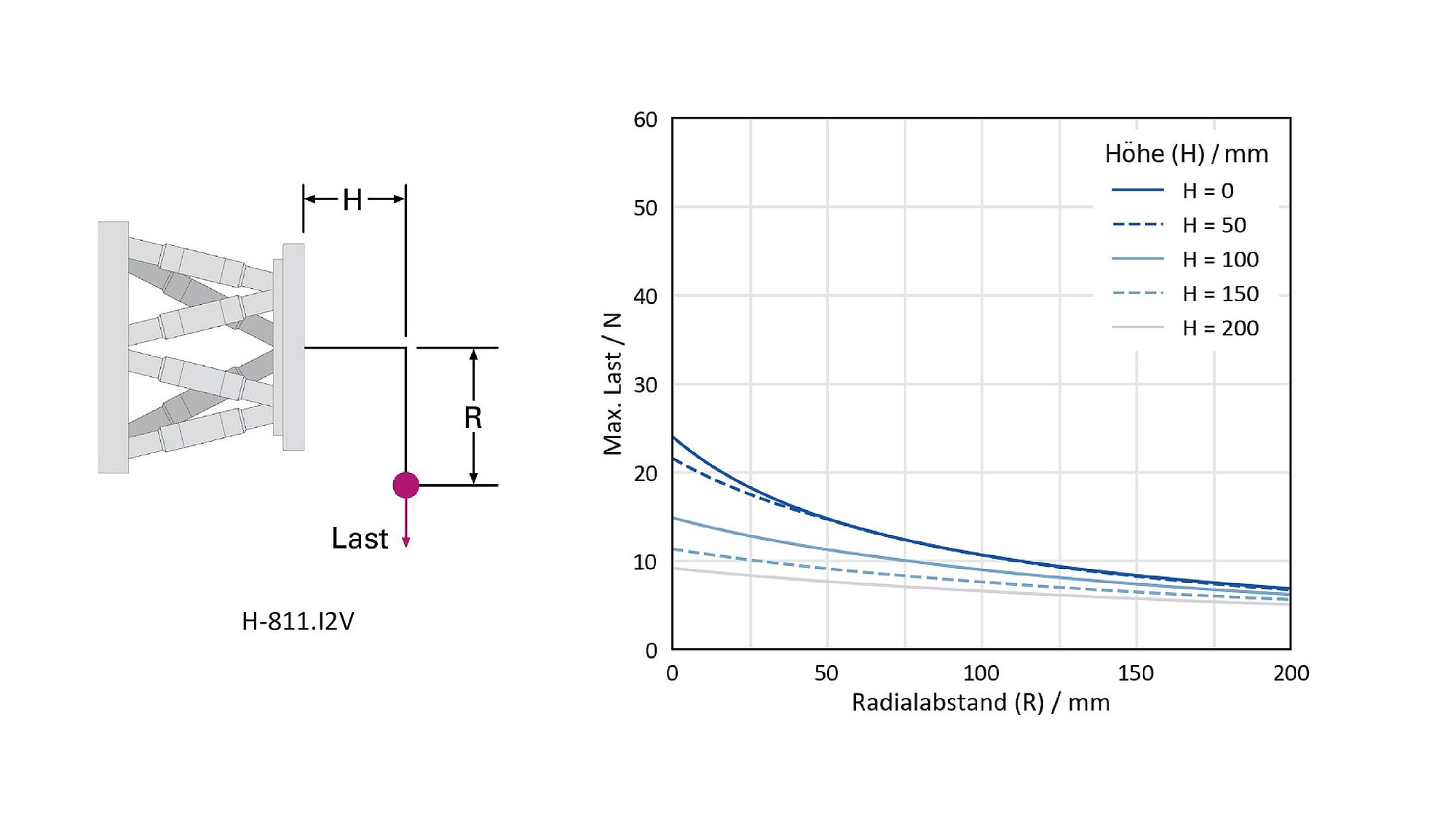
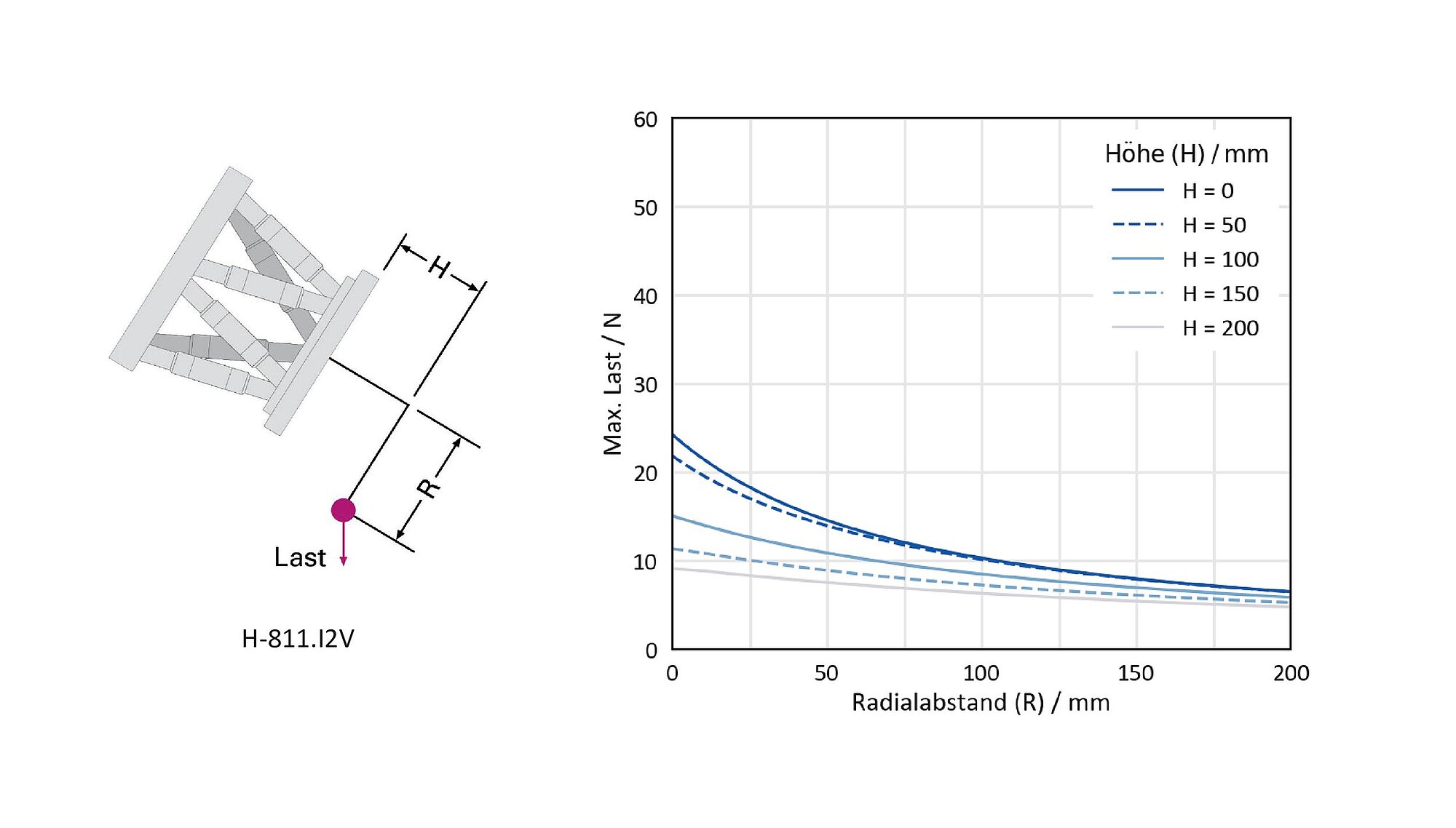
Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung
|
2,5 kg
|
|
|
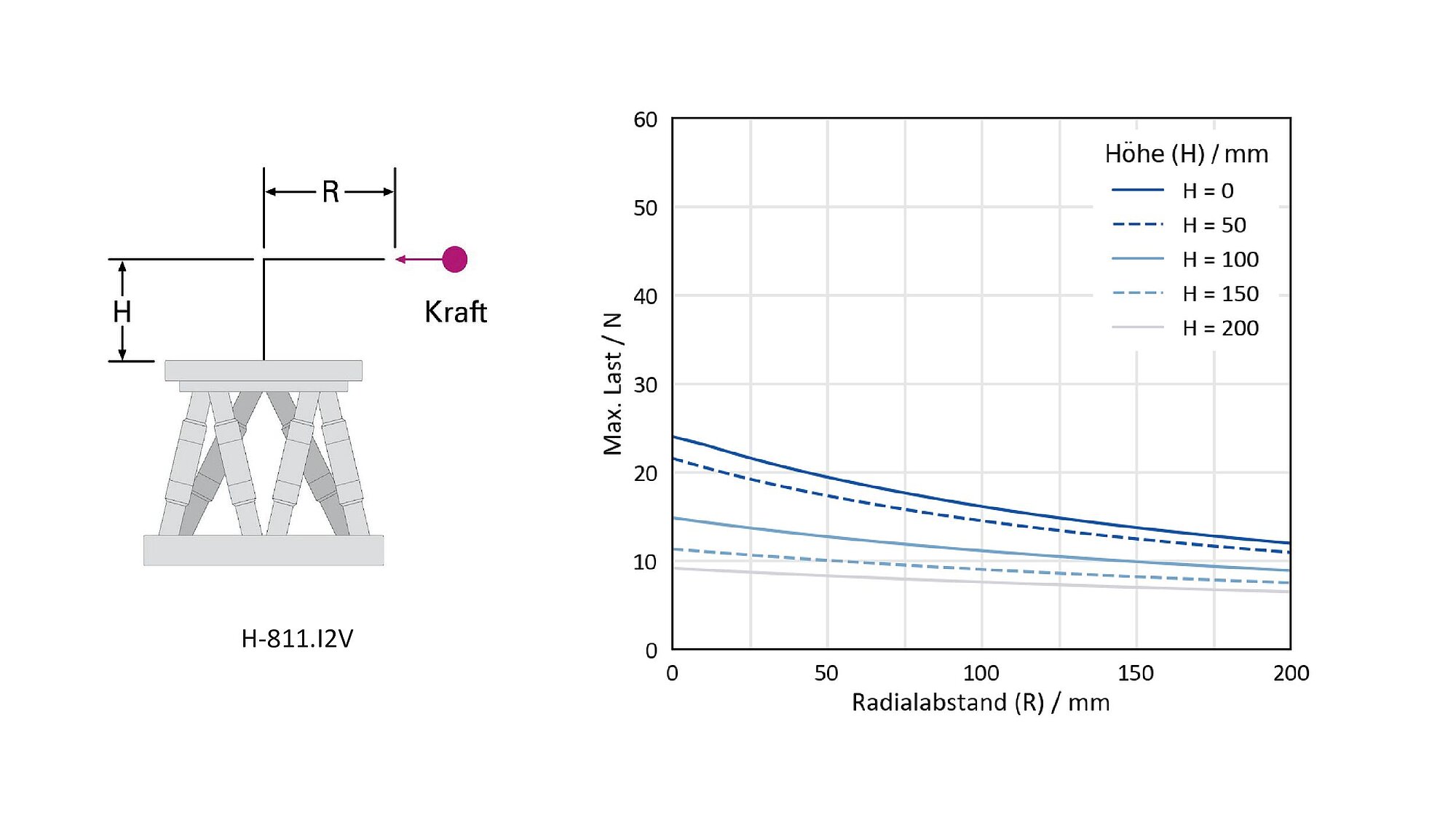
Maximale Haltekraft, passiv, Grundplatte horizontal
|
15 N
|
|
|
Maximale Haltekraft, passiv, Grundplatte in beliebiger Ausrichtung
|
2,5 N
|
|
|
Gesamtmasse
|
2,2 kg
|
|
|
Material
| Edelstahl, Aluminium |
|
|
Anschlüsse und Umgebung
|
H-811.I2V
|
Toleranz
|
|
Betriebstemperaturbereich
|
0 bis 50 °C
|
|
|
Vakuumklasse
|
10⁻⁶ ǀ hPa
|
|
|
Maximale Ausheiztemperatur
|
80 °C
|
|
|
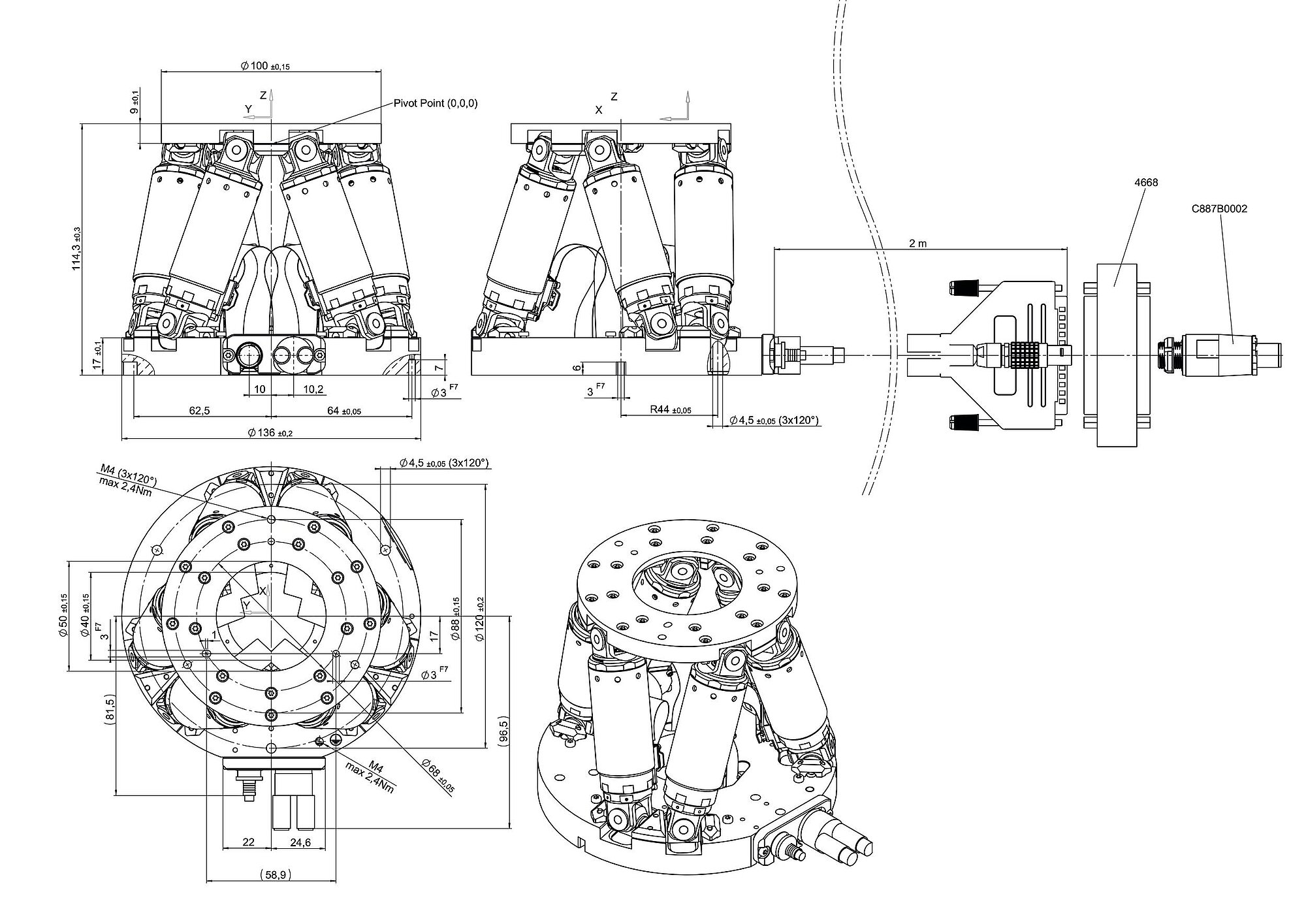
Anschluss Datenübertragung
|
HD D-Sub 78 (m)
|
|
|
Anschluss Versorgungsspannung
|
LEMO
|
|
|
Kabellänge
|
2 m
|
|
|
Kabel-Außendurchmesser Versorgungsspannung
|
4,7 mm
|
|
|
Minimaler Kabel-Biegeradius bei Festinstallation, Versorgungsspannung
|
50 mm
|
|
|
Kabel-Außendurchmesser Datenübertragung
|
6,6 mm
|
|
|
Minimaler Kabel-Biegeradius bei Festinstallation, Datenübertragung
|
70 mm
|
|
|
Empfohlene Controller/Treiber
| C-887.5x |
|