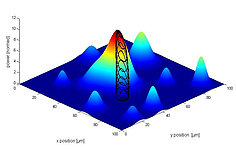
Scanzeiten: typische Zeitspanne, um den gesamten Bereich zu scannen und sich zur höchsten Intensität zu bewegen
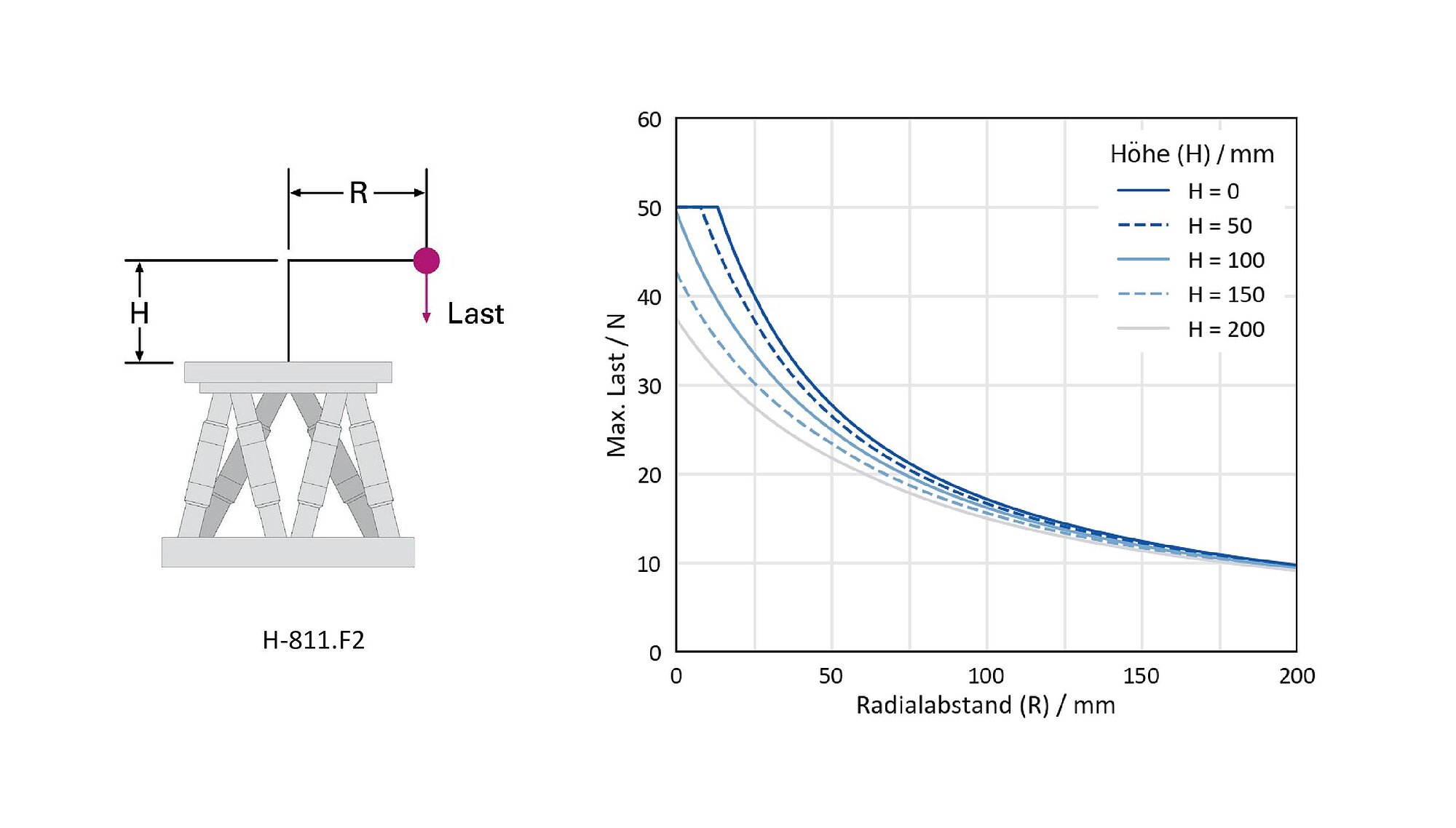
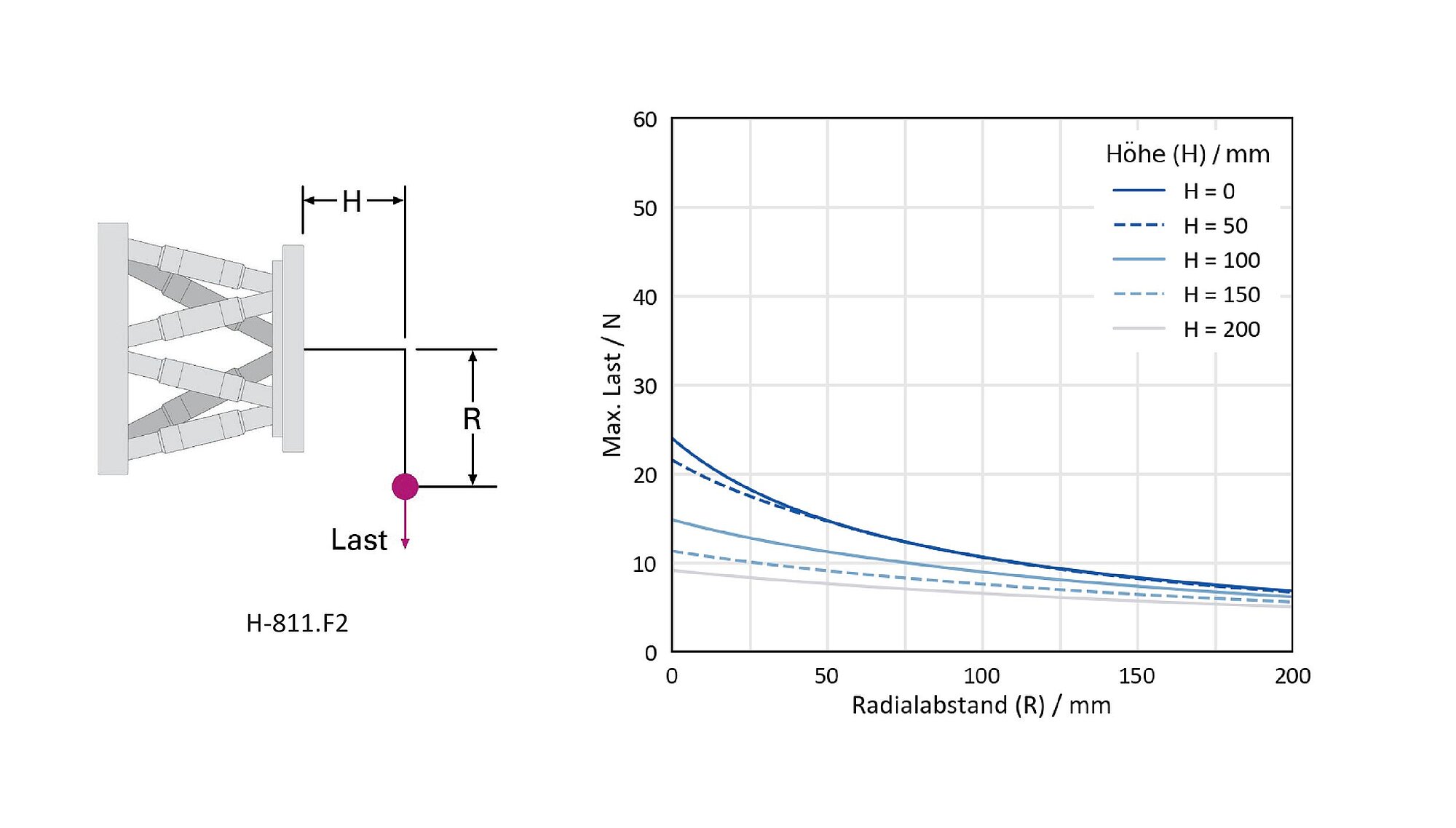
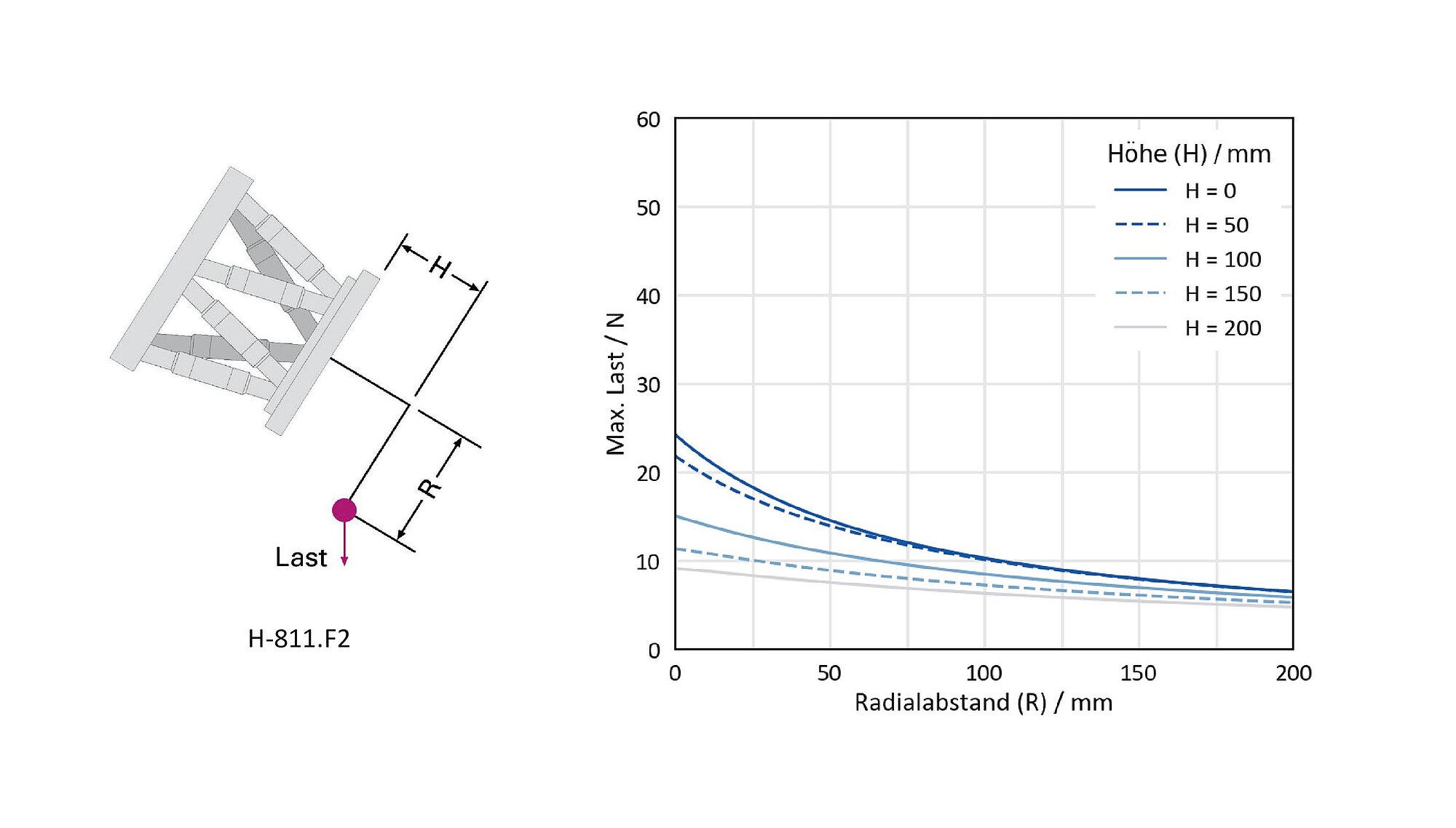
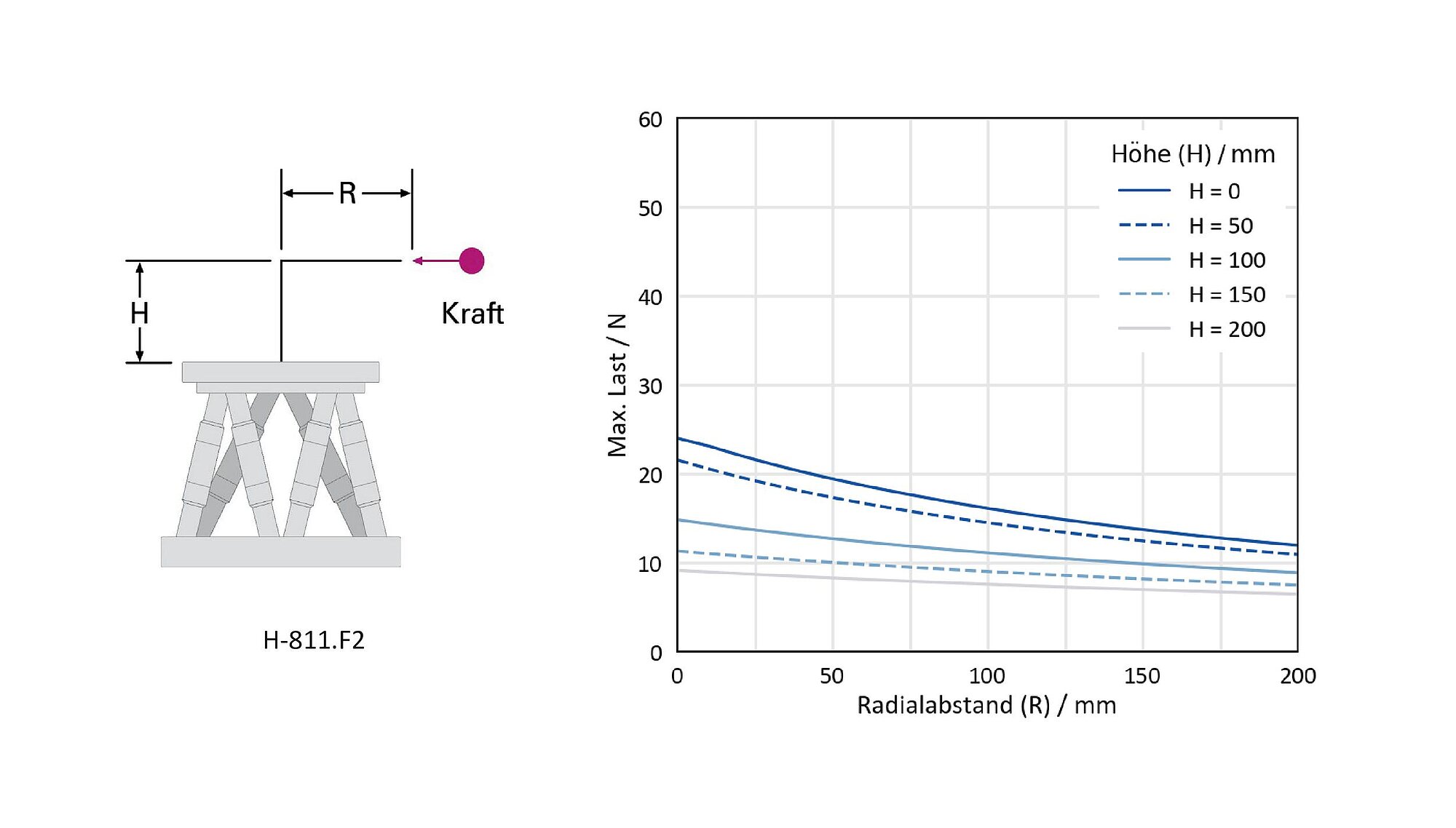
Hinweis zu maximaler Nutzlast und maximaler Haltekraft: Die angegebenen Werte gelten für den Hexapod ohne die magnetische Wechselplatte.
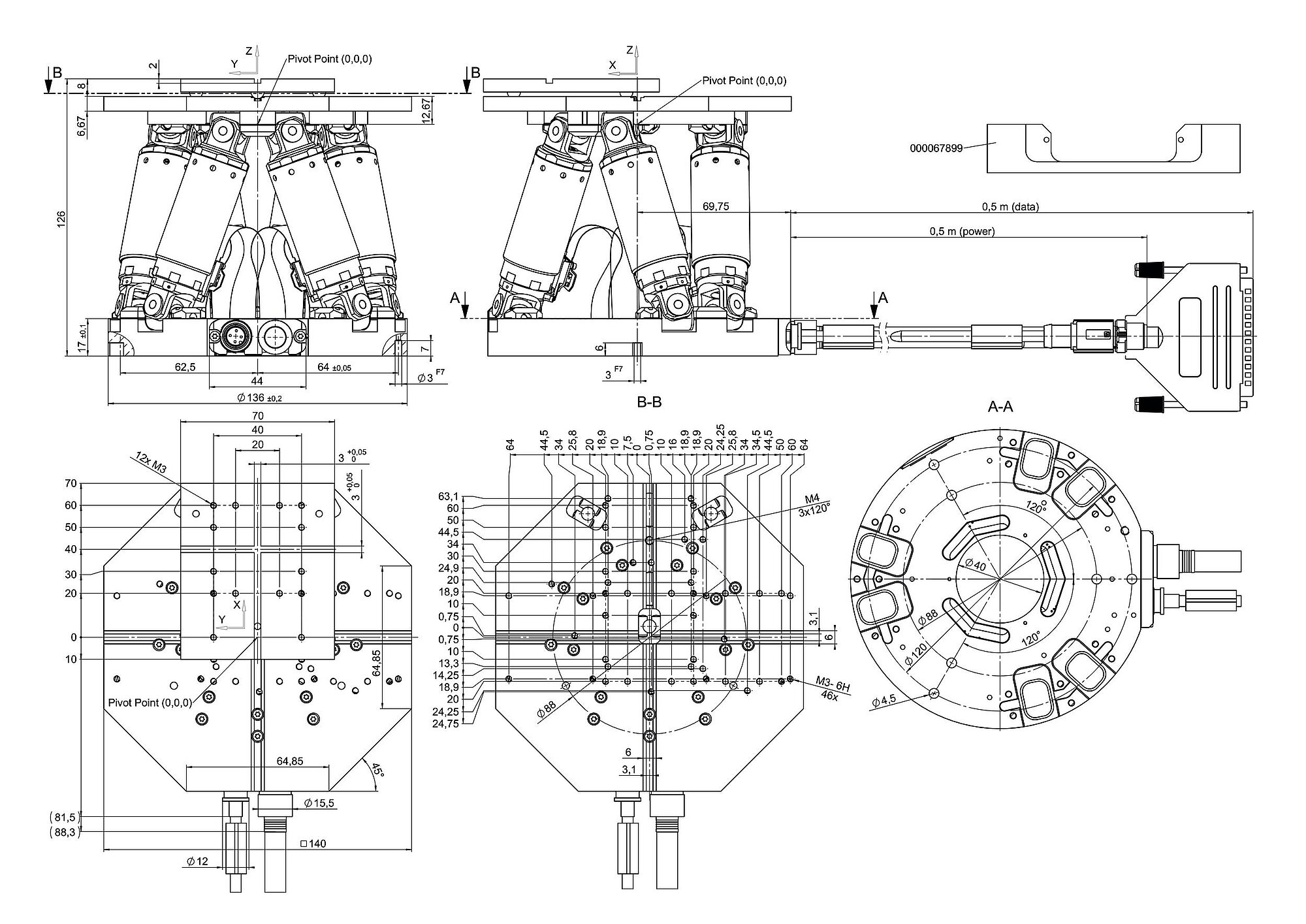
Die Fixkabel des H-811.F2 haben jeweils eine Länge von 0,5 m.
Die Fixkabel des H-811.F2 sind nicht schleppkettentauglich.
Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.