H-811.S2IHP NEU!
Miniatur-Hexapod; BLDC-Motor; 2,5 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; 0,5 m Kabellänge. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.


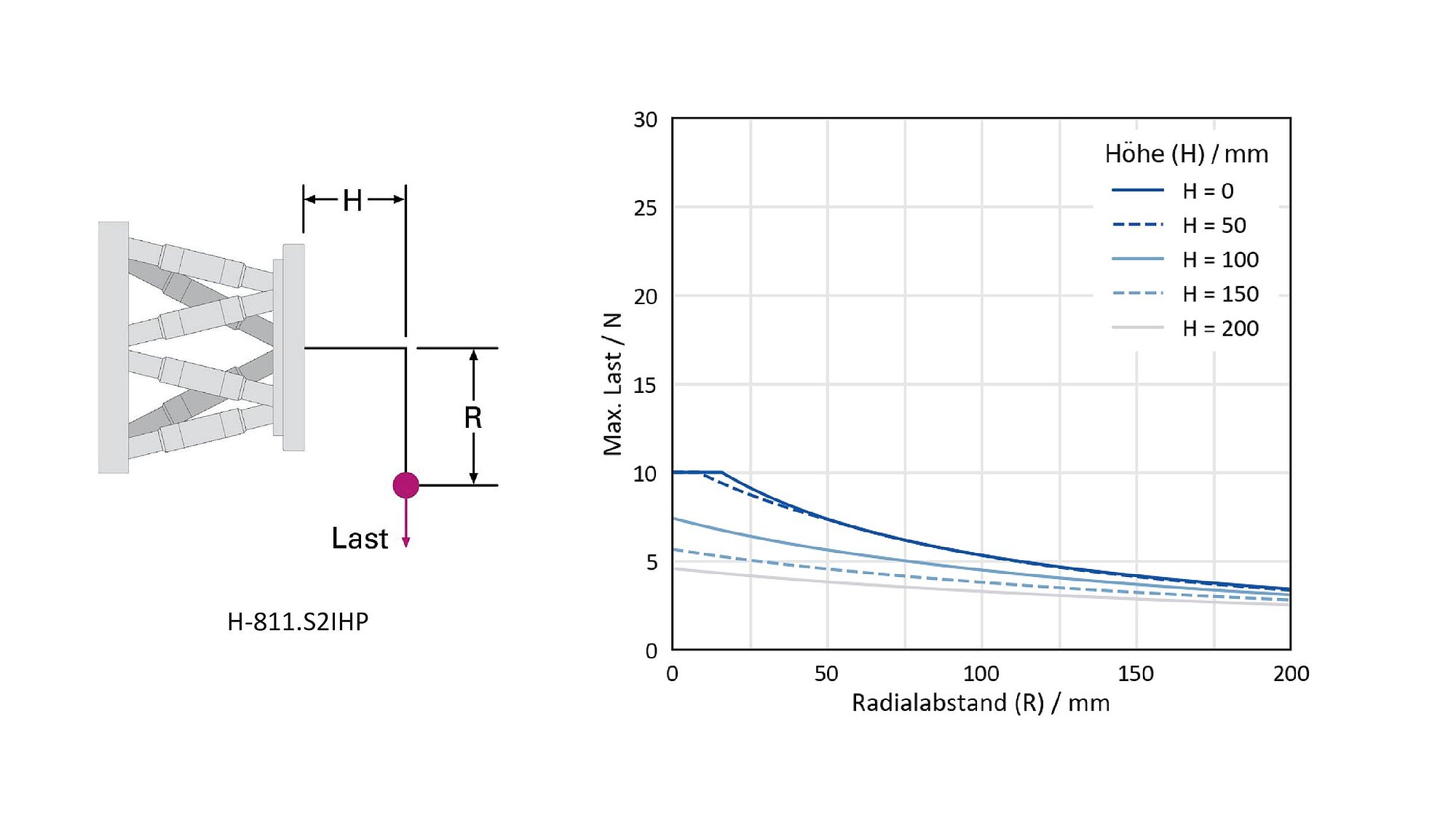
Belastungsgrenzen des H-811.S2IHP bei horizontaler Montage
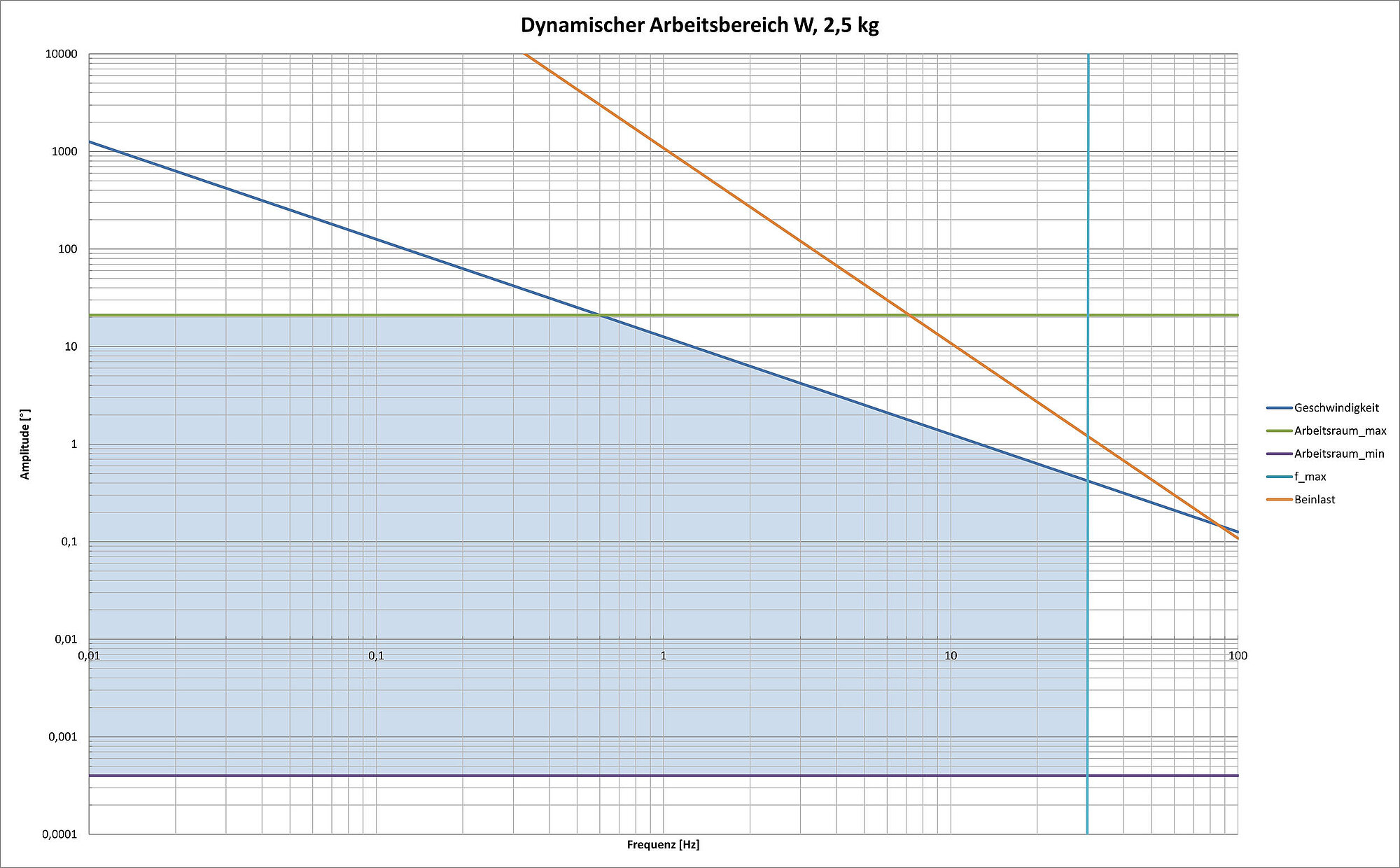
Dynamischer Arbeitsbereich des H-811.S2IHP, W (ƟZ), 2,5 kg
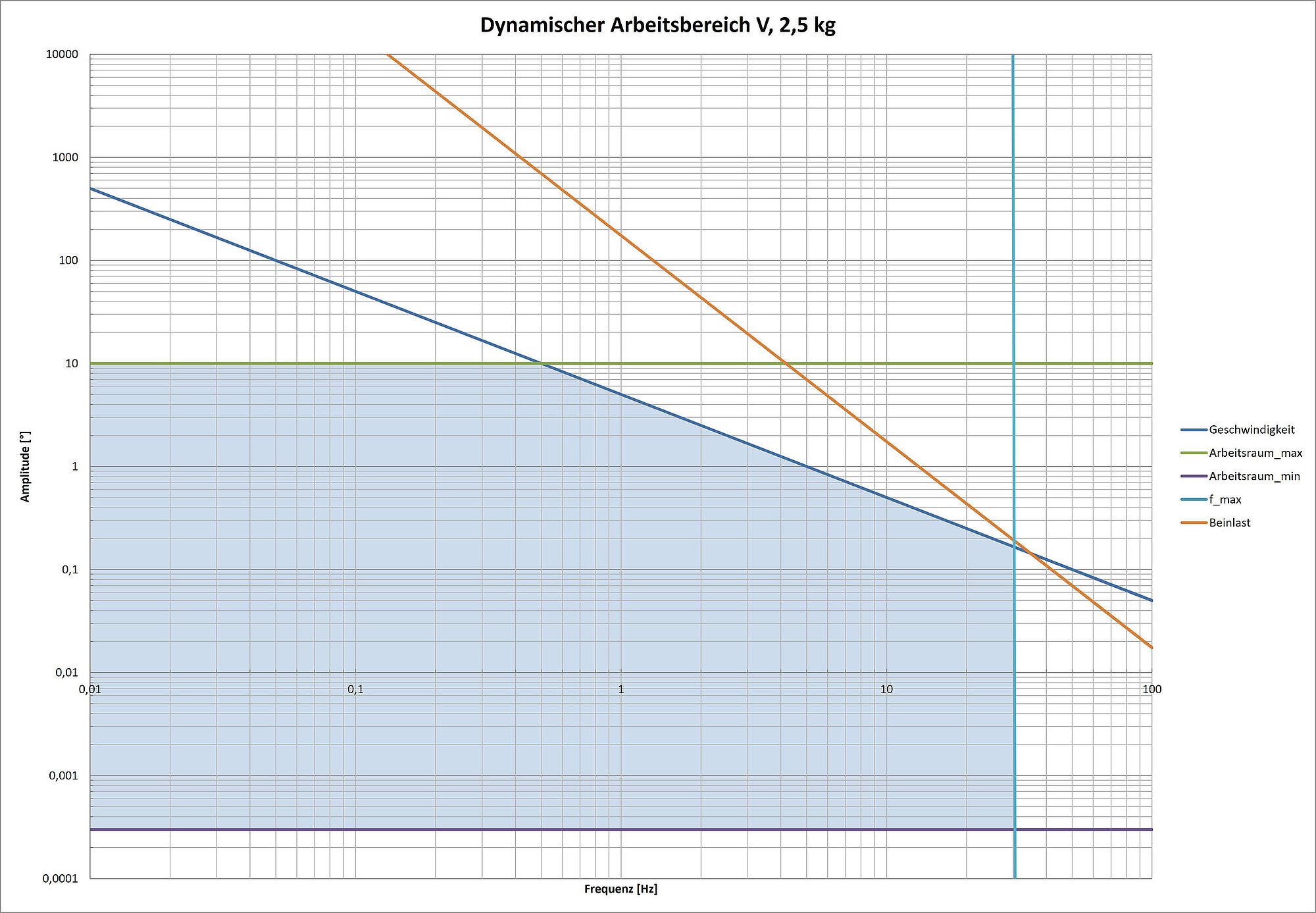
Dynamischer Arbeitsbereich des H-811.S2IHP, V (ƟY), 2,5 kg
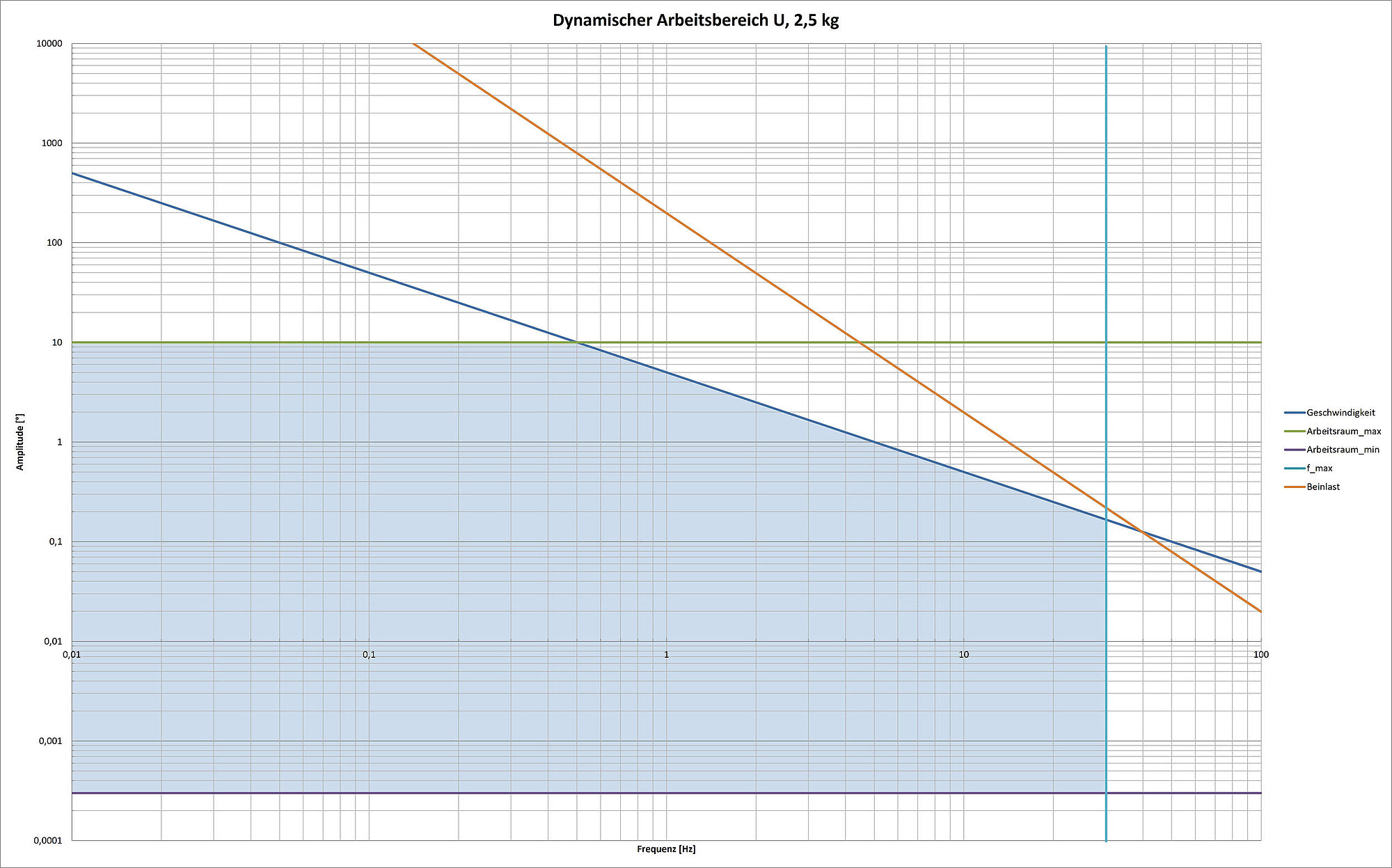
Dynamischer Arbeitsbereich des H-811.S2IHP, U (ƟX), 2,5 kg
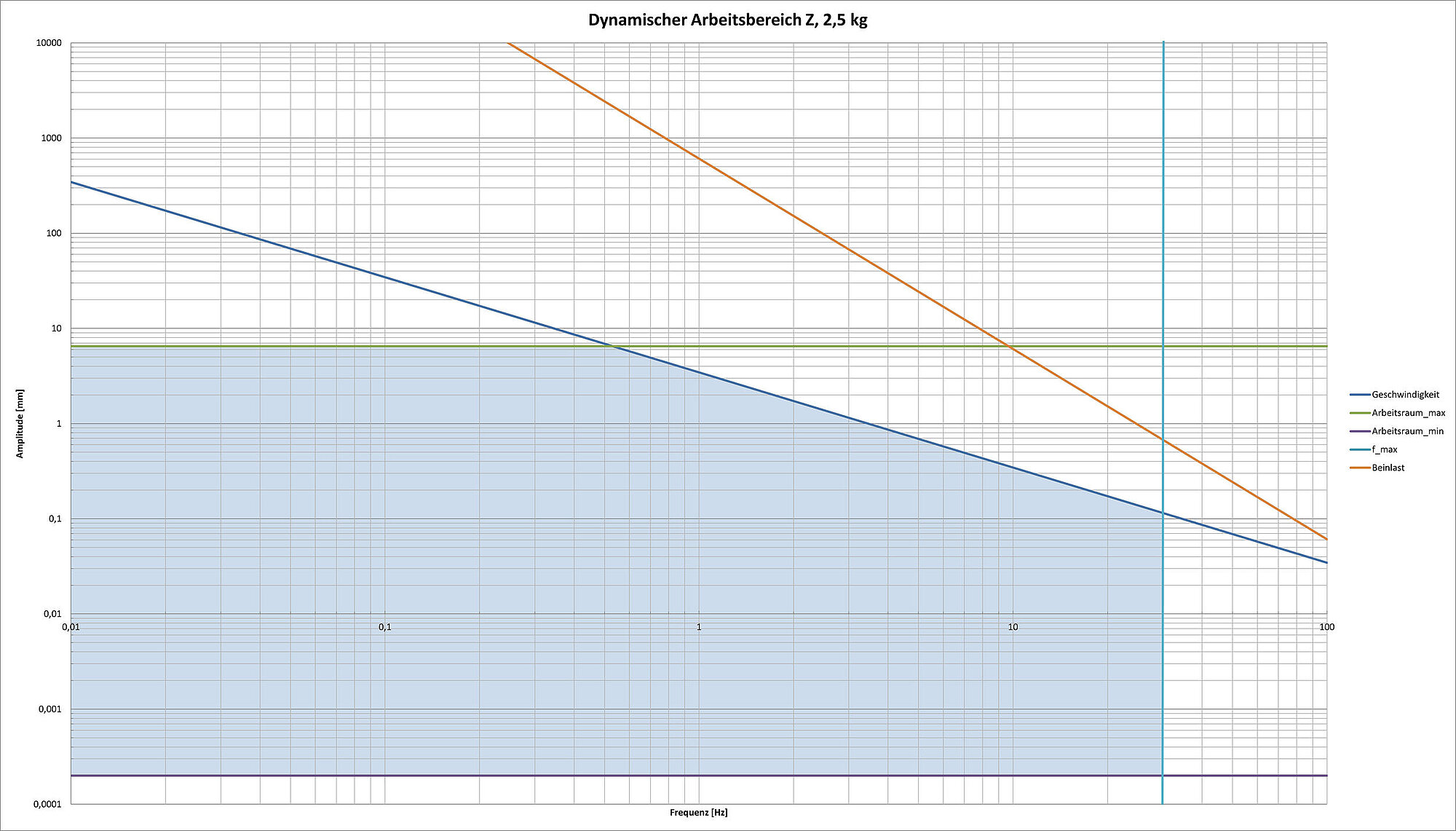
Dynamischer Arbeitsbereich des H-811.S2IHP, Z, 2,5 kg
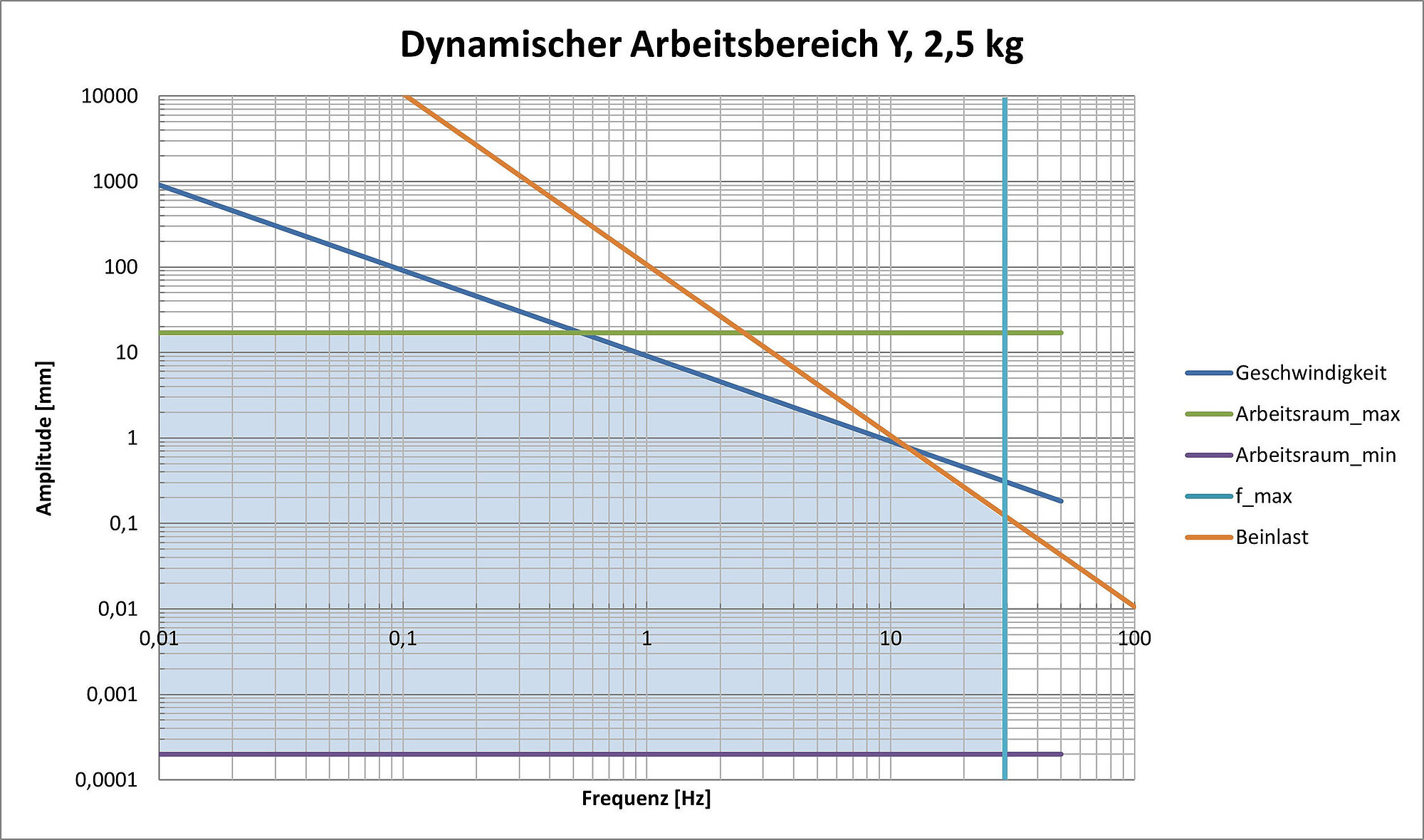
Dynamischer Arbeitsbereich des H-811.S2IHP, Y, 2,5 kg
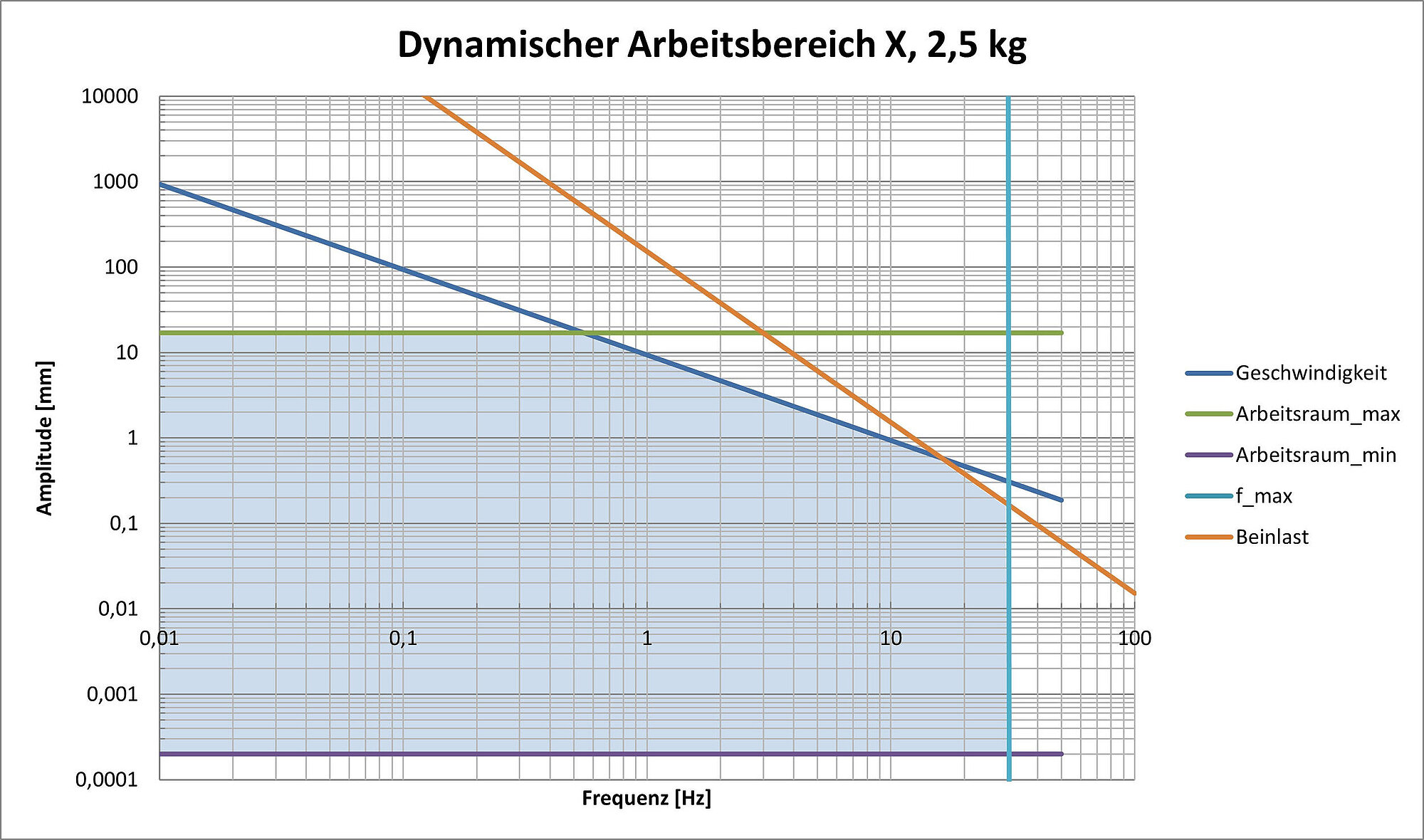
Dynamischer Arbeitsbereich des H-811.S2IHP, X, 2,5 kg
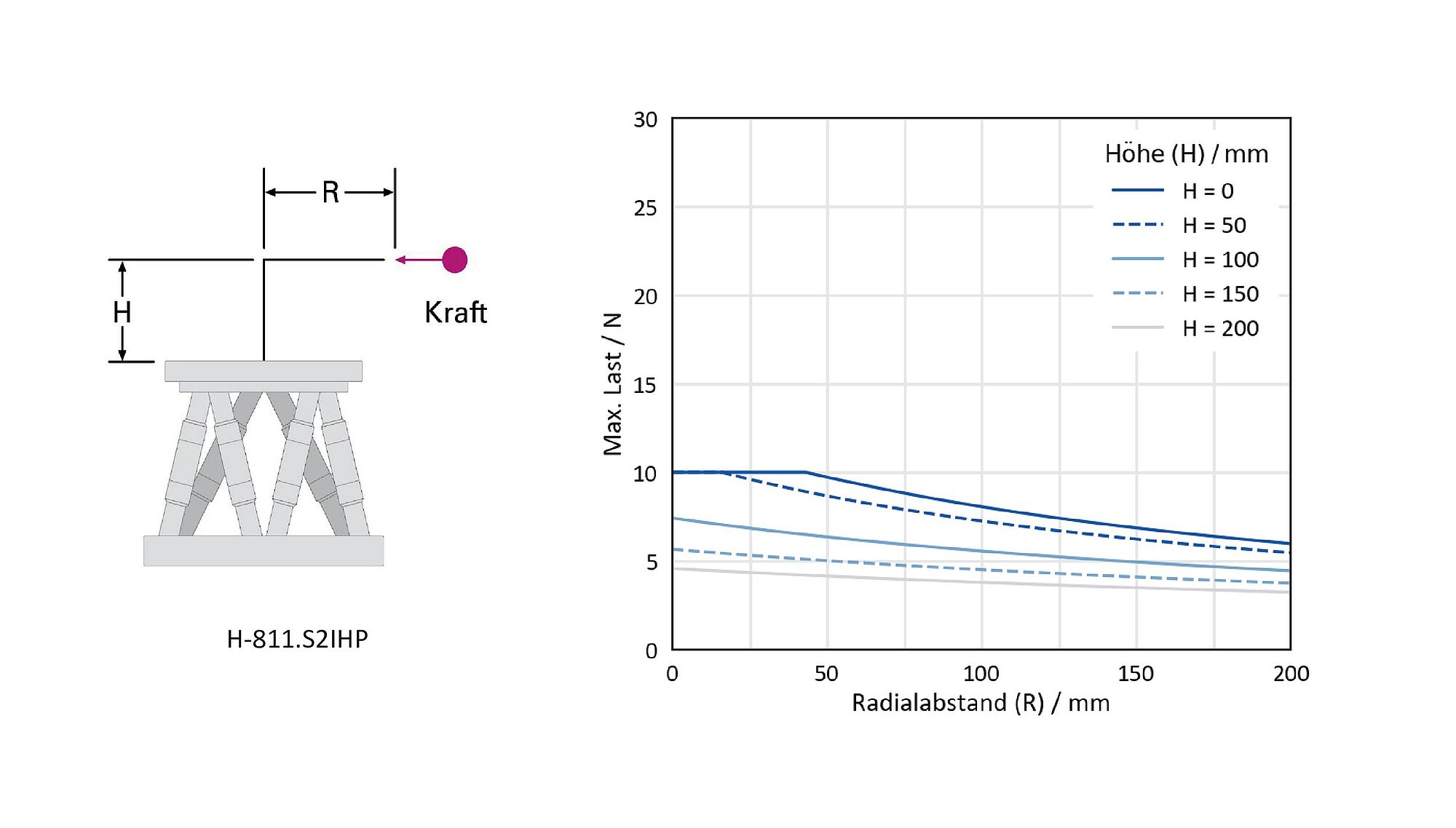
Maximal zulässige Krafteinwirkung auf den H-811.S2IHP bei horizontaler Montage
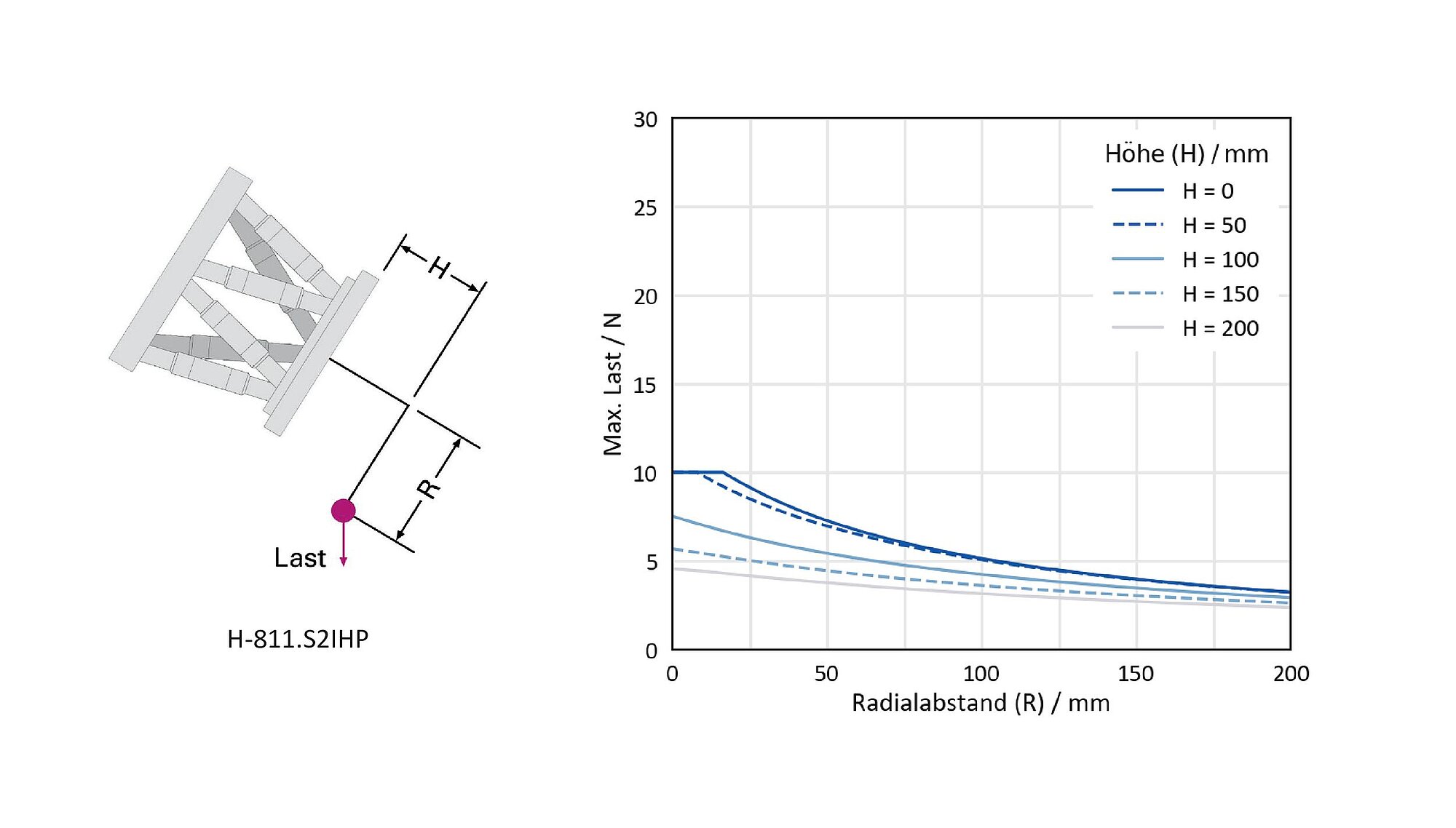
Belastungsgrenzen des H-811.S2IHP bei Montage unter ungünstigstem Winkel
Belastungsgrenzen des H-811.S2IHP bei vertikaler Montage
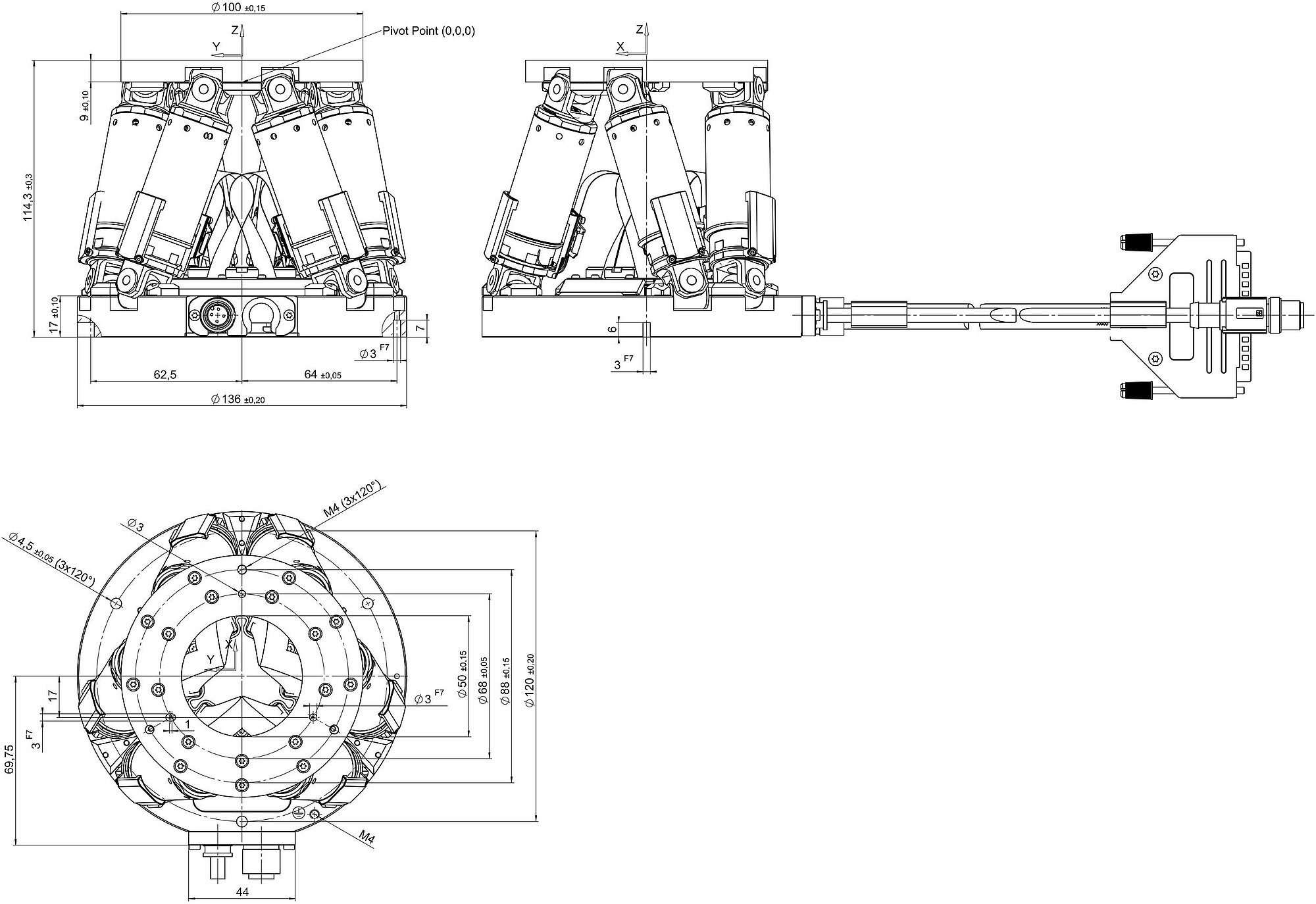
H-811.S2IHP, Abmessungen in mm, bei Nullposition des Nominalstellweges












Einsatzgebiete
Seine herausragende Präzision macht den H-811.x2IHP zum idealen Positioniersystem bei Prozessen mit Genauigkeiten im Submikrometerbereich. Aufgrund des kleinen Formfaktors und seiner bewährten Zuverlässigkeit in Anwendungen mit hohen Zyklenzahlen wird der H-811 typischerweise in der Photonik und in der Präzisionsmontage eingesetzt. Hier trägt er wesentlich dazu bei, die Produktivität komplexer Fertigungs- oder Messverfahren zu steigern.
Hohe Dynamik bei äußerster Zuverlässigkeit
Aufgrund des parallelkinematischen Designs kann der Hexapod Bewegungen in 6 Achsen in äußerst kompakter Bauform ausführen. Durch den Einsatz bürstenloser DC-Motoren und durch seine steife mechanische Konstruktion bietet der H-811 die Dynamik, die für aktive Ausrichtungsanwendungen erforderlich ist, selbst wenn externe Störungen (z. B. bei Klebeprozessen) auftreten. Umfangreiche Softwaretools bieten Unterstützung, indem sie die Systemabstimmung vereinfachen und automatische Routinen für die Ausrichtung auf ein externes analoges Steuersignal bereitstellen.
Bewegungssimulation zum Schutz des Gesamtsystems
Die Software PIVirtualMove, die kostenfrei heruntergeladen werden kann, simuliert den Stellweg, die Ausrichtung und die zulässigen Kräfte und Momente des H-811, um eine optimale Systemkonfiguration zu ermöglichen. Dabei wird sowohl der gewählte Drehpunkt als auch der Lastschwerpunkt berücksichtigt.
Work- und Tool-Koordinatensysteme sowie ein Emulationstool sind in dem kostenfreien Softwarepaket enthalten, das zum Lieferumfang des Hexapod-Controllers gehört. Die bereitgestellten Tools helfen, kritische Komponenten wie z. B. optische oder photonische Bauteile zu schützen.
| Bewegen | H-811.S2IHP | Toleranz |
|---|---|---|
| Aktive Achsen | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
| Stellweg in X | ± 17 mm | |
| Stellweg in Y | ± 16 mm | |
| Stellweg in Z | ± 6,5 mm | |
| Rotationsbereich in θX | ± 10 ° | |
| Rotationsbereich in θY | ± 10 ° | |
| Rotationsbereich in θZ | ± 21 ° | |
| Maximale Geschwindigkeit in X | 20 mm/s | |
| Empfohlene Geschwindigkeit in X | 10 mm/s | |
| Maximale Geschwindigkeit in Y | 20 mm/s | |
| Empfohlene Geschwindigkeit in Y | 10 mm/s | |
| Maximale Geschwindigkeit in Z | 20 mm/s | |
| Empfohlene Geschwindigkeit in Z | 10 mm/s | |
| Maximale Winkelgeschwindigkeit in θX | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θX | 240 mrad/s | |
| Maximale Winkelgeschwindigkeit in θY | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θY | 240 mrad/s | |
| Maximale Winkelgeschwindigkeit in θZ | 500 mrad/s | |
| Empfohlene Winkelgeschwindigkeit in θZ | 240 mrad/s | |
| Amplitude-Frequenz-Produkt in X | 9,35 mm·Hz | |
| Amplitude-Frequenz-Produkt in Y | 9,12 mm·Hz | |
| Amplitude-Frequenz-Produkt in Z | 3,45 mm·Hz | |
| Amplitude-Frequenz-Produkt in θX | 5 °·Hz | |
| Amplitude-Frequenz-Produkt in θY | 5 °·Hz | |
| Amplitude-Frequenz-Produkt in θZ | 12,6 °·Hz | |
| Amplitude-Frequenz²-Produkt in X | 152 mm·Hz² | |
| Amplitude-Frequenz²-Produkt in Y | 106 mm·Hz² | |
| Amplitude-Frequenz²-Produkt in Z | — | |
| Amplitude-Frequenz²-Produkt in θX | — | |
| Amplitude-Frequenz²-Produkt in θY | — | |
| Amplitude-Frequenz²-Produkt in θZ | — | |
| Amplitudenfehler | 10 % | max. |
| Phasenfehler | 60 ° | max. |
| Maximale Frequenz | 30 Hz | |
| Positionieren | H-811.S2IHP | Toleranz |
| Kleinste Schrittweite in X | 0,04 µm | |
| Kleinste Schrittweite in Y | 0,04 µm | |
| Kleinste Schrittweite in Z | 0,02 µm | |
| Kleinste Schrittweite in θX | 0,5 µrad | |
| Kleinste Schrittweite in θY | 0,5 µrad | |
| Kleinste Schrittweite in θZ | 0,75 µrad | |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,2 µm | |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,2 µm | |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,1 µm | |
| Unidirektionale Wiederholgenauigkeit in θX | ± 2 µrad | |
| Unidirektionale Wiederholgenauigkeit in θY | ± 2 µrad | |
| Unidirektionale Wiederholgenauigkeit in θZ | ± 3 µrad | |
| Umkehrspiel in X | 0,2 µm | typ. |
| Umkehrspiel in Y | 0,2 µm | typ. |
| Umkehrspiel in Z | 0,06 µm | typ. |
| Umkehrspiel in θX | 2 µrad | typ. |
| Umkehrspiel in θY | 2 µrad | typ. |
| Umkehrspiel in θZ | 4 µrad | typ. |
| Antriebseigenschaften | H-811.S2IHP | Toleranz |
| Antriebstyp | Bürstenloser DC-Motor | |
| Mechanische Eigenschaften | H-811.S2IHP | Toleranz |
| Steifigkeit in X | 0,7 N/µm | |
| Steifigkeit in Y | 0,7 N/µm | |
| Steifigkeit in Z | 8 N/µm | |
| Maximale Nutzlast, Grundplatte horizontal | 2,5 kg | |
| Maximale Nutzlast, Grundplatte in beliebiger Ausrichtung | 1 kg | |
| Maximale Haltekraft, passiv, Grundplatte horizontal | 7,5 N | |
| Gesamtmasse | 2,3 kg | |
| Material | Edelstahl, Aluminium | |
| Anschlüsse und Umgebung | H-811.S2IHP | Toleranz |
| Betriebstemperaturbereich | 0 bis 40 °C | |
| Anschluss Datenübertragung | HD D-Sub 78 (m) | |
| Anschluss Versorgungsspannung | M12 4-polig (m) | |
| Kabellänge | 0,5 m | |
| Kabel-Außendurchmesser Versorgungsspannung | 4,95 mm | |
| Minimaler Kabel-Biegeradius bei Festinstallation, Versorgungsspannung | 25 mm | |
| Kabel-Außendurchmesser Datenübertragung | 9,5 mm | |
| Minimaler Kabel-Biegeradius bei Festinstallation, Datenübertragung | 95 mm | |
| Empfohlene Controller/Treiber | C-887.5x mit BISS-Kommunikation |
Hinweis zu Amplitude-Frequenz2-Produkt in Z, ƟX, ƟY, ƟZ: keine Einschränkung
Die Fixkabel des H-811.S2IHP haben jeweils eine Länge von 0,5 m.
Die Fixkabel des H-811.S2IHP sind nicht schleppkettentauglich.
Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Sonderausführungen auf Anfrage.
Bei der Vermessung der Positionsspezifikationen wird die typische Geschwindigkeit verwendet. Die Daten werden als Messprotokoll mit dem Produkt ausgeliefert und bei PI vorgehalten.
Die maximalen Stellwege der einzelnen Koordinaten (X, Y, Z, θX, θY, θZ) sind voneinander abhängig. Die Daten für jede Achse zeigen jeweils ihren maximalen Stellweg, wenn alle anderen Achsen auf der Nullposition des Nominalstellweges stehen und das werkseitige Koordinatensystem verwendet wird, beziehungsweise wenn der Pivotpunkt auf 0,0,0 gesetzt ist.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
H-811 Miniatur-Hexapoden
Technical Note für das Auspacken des Hexapods
Certification of Registration of Vibratory Apparatus
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Miniatur-Hexapod; BLDC-Motor; 2,5 kg Nutzlast; 20 mm/s maximale Geschwindigkeit; 0,5 m Kabellänge. Anschlusskabel sind nicht im Lieferumfang enthalten und müssen separat bestellt werden.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.