Sechs Freiheitsgrade
Sechs Freiheitsgrade
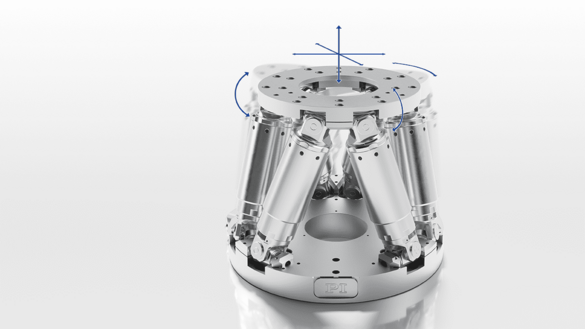
Präzisionshexapoden ermöglichen Bewegungen in sechs Freiheitsgraden in lediglich einem mechanischen Aufbau. Die Bewegung der Plattform erfolgt in drei translatorischen Achsen (X, Y, Z) und drei rotatorischen Achsen (ΘX, ΘY, ΘZ). Die typische parallelkinematische Struktur von Hexapoden besteht aus sechs längenveränderlichen Aktoren, die über Gelenke jeweils mit einer Grundplatte und einer Bewegungsplattform verbunden sind.
Kompakter Bauraum
Kompakter Bauraum
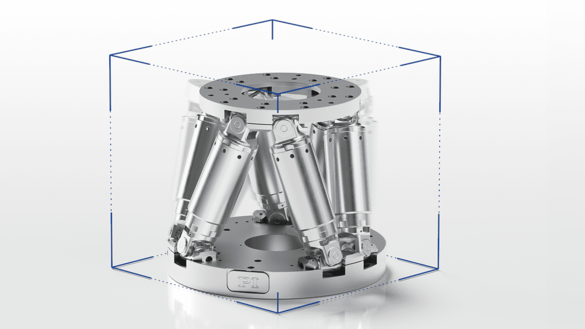
Aufgrund des parallelkinematischen Designs können Hexapoden mehrachsige Bewegungen auch in äußerst kompakter Bauform ausführen. Damit lassen sie sich optimal in kundenspezifische Prozesse, Maschinen und Anlagen integrieren.
Frei definierbarer Drehpunkt

Frei definierbarer Drehpunkt
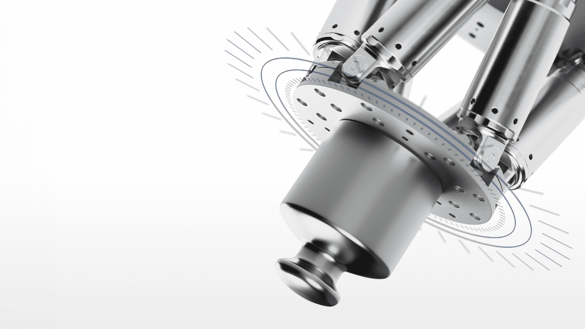
Die Lage des Drehpunkts (Pivotpunkt) und die Ausrichtung des Bezugskoordinatensystems lassen sich bei Präzisionshexapoden von Physik Instrumente (PI) schnell und einfach per Softwarebefehl definieren. Innerhalb der Koordinatensysteme bietet der frei wählbare Drehpunkt größtmögliche Flexibilität für eine präzise Anpassung der Hexapod-Bewegungsplattform an spezifische Anforderungen. Die zuvor definierten Work- und Tool-Koordinatensysteme lassen sich jederzeit aktivieren oder deaktivieren. Eine Änderung der mechanischen Komponenten ist nicht erforderlich.
Hohe Steifigkeit
Hohe Steifigkeit
Aufgrund des parallelkinematischen Designs zeichnen sich Hexapoden durch eine hohe Steifigkeit aus. Daher wird die Performance der Hexapoden nicht durch externe Kräfte beeinflusst. Selbst bei veränderlichen Kräften kann die geforderte Position gehalten werden.
Höchstmaß an Präzision
Höchstmaß an Präzision
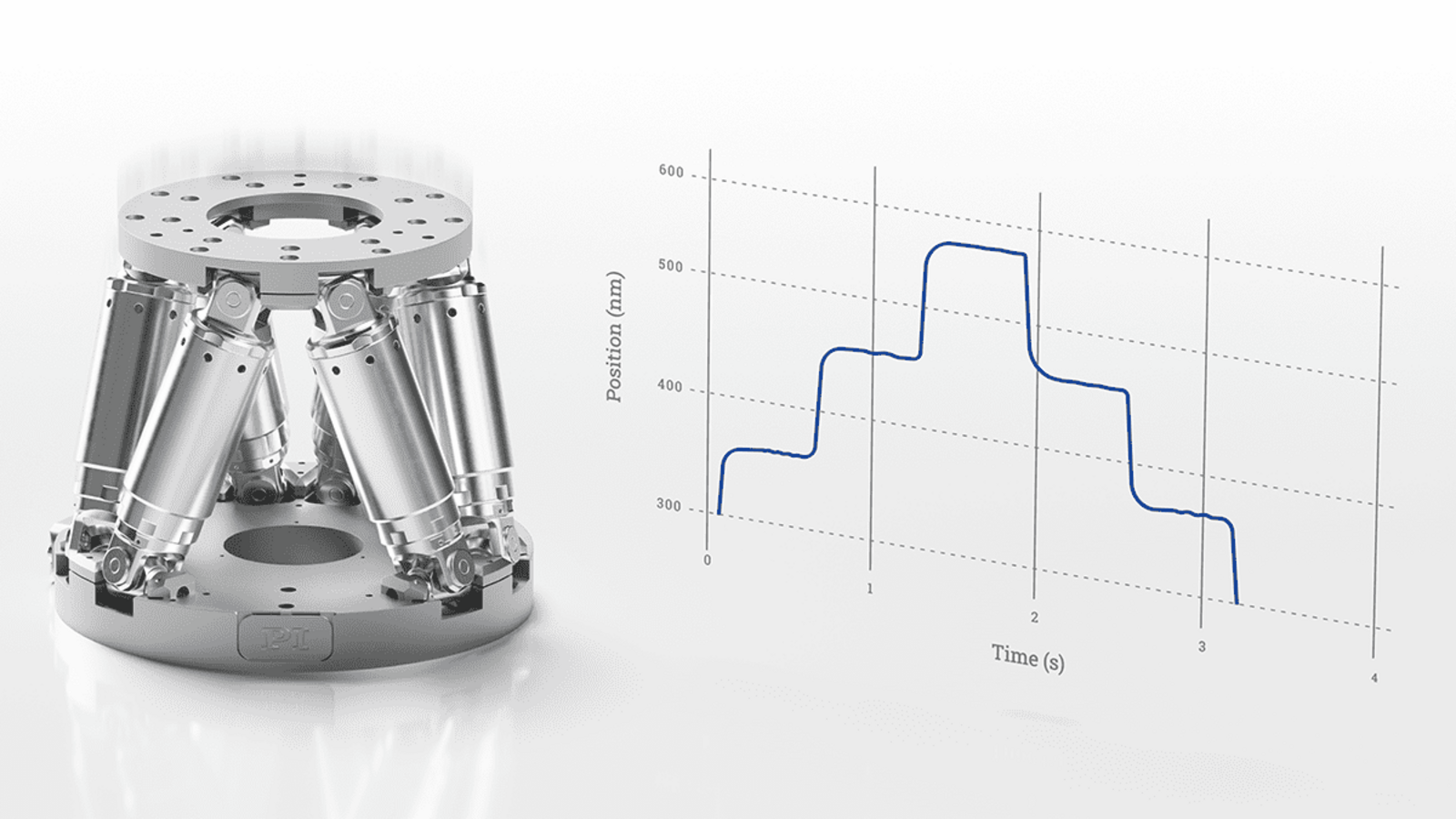
Durch herausragendes Design sowie den Einsatz hochwertiger Materialien und Komponenten stehen die Hexapoden von PI für ein Höchstmaß an Präzision. Standardversionen erreichen kleinste Schrittweiten von bis zu 20 nm und Wiederholgenauigkeiten von bis zu ±0,06 µm.
Exzellente Bahntreue und Dynamik
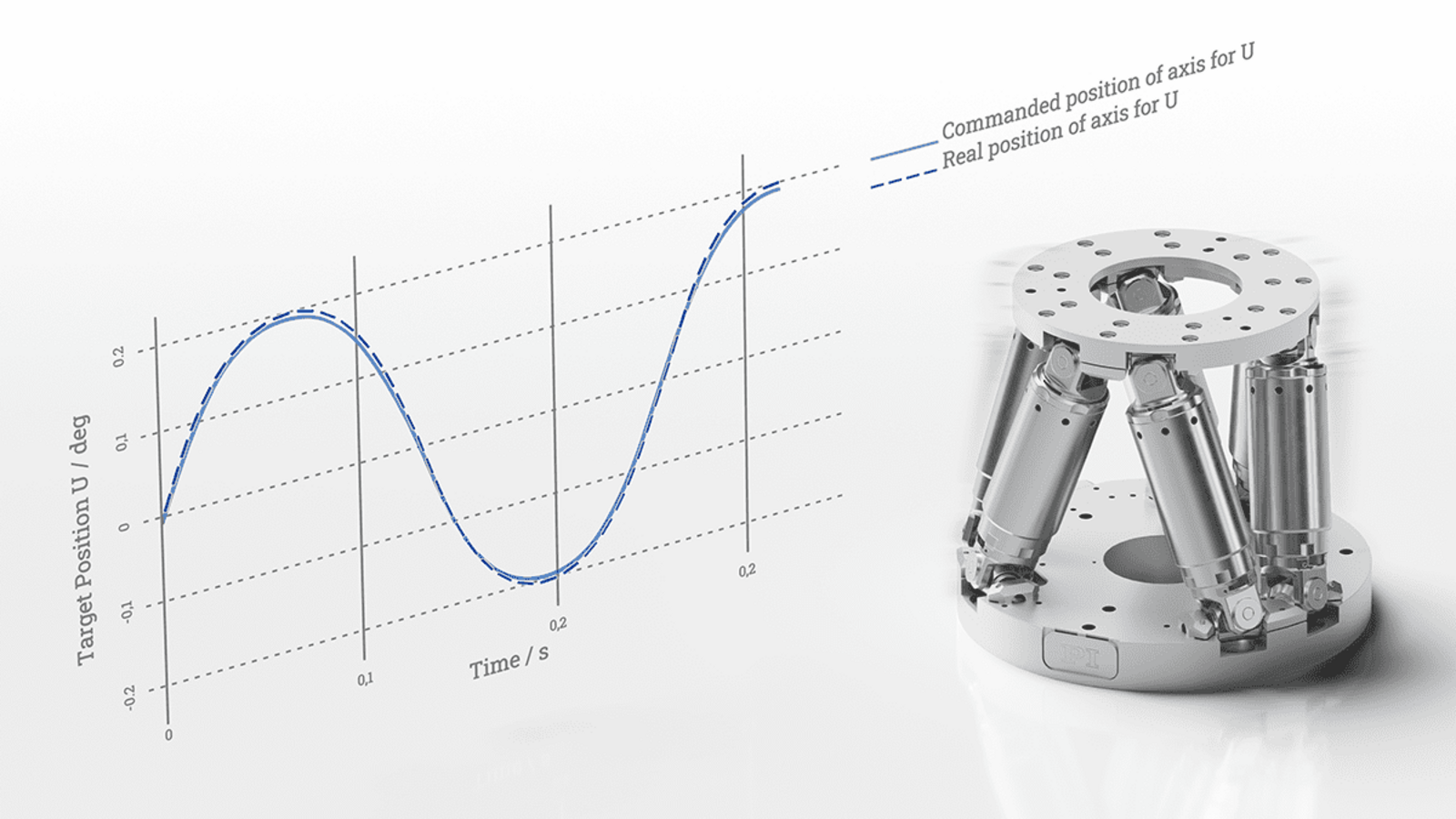
Exzellente Bahntreue und Dynamik
Die hohe Dynamik im System und eine ausgereifte Ansteuerung ermöglichen eine optimale Übereinstimmung zwischen Soll- und Ist-Position. Trajektorien für Sinusschwingungen können bei Bedarf direkt über den Controller erzeugt werden und erlauben Bewegungsabläufe mit höchster Bahntreue. Zudem lassen sich dynamische Bewegungen und Schwingungen mit vergleichsweise geringem Energieaufwand realisieren, da die Aktoren nur die Plattform und somit wenig Masse bewegen.
Einfache Integration
Der leistungsstarke Hexapod-Controller sorgt für eine einfache, intuitive Ansteuerung der parallelkinematischen Systeme: Alle Zielpositionen können in kartesischen Koordinaten kommandiert werden. Berechnungen zur Ansteuerung der Aktoren und der daraus resultierenden gewünschten Bewegung der Plattform übernimmt der Controller. Mit der universellen Benutzeroberfläche (GUI) von PI lassen sich nicht nur alle Hexapod-Systeme, sondern auch alle anderen Positioniersysteme von PI mit jeglicher Antriebstechnologie ansteuern und in Betrieb nehmen. Für die Einbindung in Automatisierungsprozesse steht eine industrielle EtherCAT-Schnittstelle zur Verfügung.
Entdecken Sie die breite Palette an Präzisionshexapoden von PI
Präzisionshexapoden von PI basieren auf mehr als drei Jahrzehnten Entwicklungs- und Fertigungserfahrung. Mit einem breiten Portfolio an Antriebstechnologien – von piezoelektrisch bis elektromagnetisch – bietet PI in Kombination mit hervorragender Sensorik, Software und Bewegungssteuerung Hexapoden für unterschiedlichste Spezifikationsanforderungen und Einbausituationen an. Dank leistungsstarker, intuitiver Controller und Software lassen sich die Hexapoden einfach und präzise ansteuern.
Entdecken Sie die breite Palette an Präzisionshexapoden von PI für Lasten von 1 kg bis 250 kg und Wiederholgenauigkeiten bis zu ±0,06 µm bei Standardversionen. Auch kundenspezifische Präzisionshexapoden für Lasten von mehr als 2.000 kg sind möglich.
