Hexapoden und SpaceFAB bieten sechs Bewegungsachsen
- Ein Hexapod ist ein System für die Bewegung und Positionierung, Justierung und Verschiebung von Lasten in sechs Achsen im Raum, drei linearen und drei rotatorischen. Hexapoden sind parallelkinematisch aufgebaut, d.h. die sechs Antriebe wirken gemeinsam auf eine einzige bewegte Plattform.
- Die Länge der Einzelantriebe ist veränderlich, was eine Bewegung in allen sechs räumlichen Freiheitsgraden ermöglicht. Das besondere Hexapoddesign optimiert die Gesamtsteifigkeit und erlaubt eine große zentrale Apertur.
- Hexapoden können je nach Ausführung Lasten von einigen kg bis zu einigen Hundert kg, oder sogar mehreren Tonnen in beliebiger Raumorientierung, also unabhängig von der Montageausrichtung, mit hoher Präzision positionieren.
Motoren, Antriebe und Getriebeeinheit
PI Hexapoden basieren auf >> piezoelektrischen oder >> elektromechanischen Antrieben und sind damit viel genauer als die hydraulischen Hexapoden, die von Flug- oder Fahrsimulatoren bekannt sind. Präzisionsspindelantriebe oder magnetische bzw. piezobasierte Linearmotoren kommen zum Einsatz. Die meisten Systeme sind selbsthemmend. Direkt getriebene Hexapoden bieten höhere Geschwindigkeiten, für den industriellen Einsatz sind insbesondere bürstenlose Motoren (BLDC) geeignet.
Die Anwendung bestimmt die Antriebstechnologien: So sind Hexapoden mit piezoelektrischen >> PiezoWalk® Schreitantrieben für Ultrahochvakuum-Anwendungen geeignet und können auch in sehr starken Magnetfeldern betrieben werden.

Für besonders hohe Präzision und geringe lineare Auslenkungen und Winkel können >> Festkörpergelenke eingesetzt werden, die reibungsfrei, spielfrei und ohne Einsatz von Schmiermitteln arbeiten.
![[] universal joints](/fileadmin/_processed_/3/1/csm_Universal_joints_of_the_H-840_Hexapod_model_2864e2deef.png)
Gelenke
Gelenke
Hexapoden für die Präzisionspositionierung werden häufig mit kardanischen Gelenken ausgestattet, bei denen zwei Gelenkachsen orthogonal angeordnet sind. Damit wird die optimale Kombination aus zwei Freiheitsgraden und Steifigkeit des Aufbaus erreicht. Kugelgelenke bieten mehrere Freiheitsgrade in einer mechanisch oft einfacheren Konstruktion. Sie können jedoch die Gesamtsteifigkeit und damit die Präzision bei auftretenden Momenten reduzieren. Eine kompensierende Vorspannung ist nur möglich, wenn die Antriebe entsprechend hohe Kräfte aufbringen, z. B. die >> NEXLINE® Piezomotorantriebe.
Arbeitsraum
Arbeitsraum
Die Gesamtheit aller Kombinationen von Translationen und Rotationen, die der Hexapod von der aktuellen Position aus anfahren kann, wird als Arbeitsraum bezeichnet; man bezieht sich bei der Angabe auf den Ursprung des verwendeten Koordinatensystems. Der Arbeitsraum kann durch externe Faktoren wie Hindernisse oder die Abmessungen und Position der Last eingeschränkt werden.


PI bietet >> Softwaretools an, die den Arbeitsraum simulieren und die Kollision mit Objekten in der Umgebung prüfen können.
Spezielle Ansteuerung

Spezielle Ansteuerung
Die einzelnen Antriebe eines Hexapoden zeigen nicht notwendigerweise in Richtung der Bewegungsachsen, weshalb eine schnelle Steuerung, die auch die Koordinatentransformation übernimmt, für den Betrieb benötigt wird.
PI setzt leistungsfähige Digitalcontroller ein und bietet kundenfreundliche Software zur einfachen Kommandierung. Die Positionen werden in kartesischen Koordinaten vorgegeben, alle Transformationen auf die Einzelantriebe finden im Controller statt.
Eine wesentliche Eigenschaft ist der frei definierbare Dreh- oder Pivotpunkt. Damit kann die Bewegung der Hexapodplattform gezielt auf die jeweilige Applikation abgestimmt und in den Gesamtprozess integriert werden.
SpaceFAB
SpaceFAB
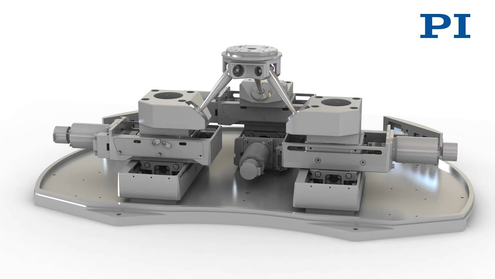
SpaceFAB sind alternative parallelkinematische Aufbauten, deren Beinlänge konstant ist. Die sechs Freiheitsgrade werden dadurch erzeugt, dass ein passives Bein in zwei oder mehr Achsen bewegt werden kann: Im SpaceFAB treibt je eine XY-Anordnung von Linearversteller die Einzelbeine an.
| Hexapod | SpaceFAB | |
|---|---|---|
| Design | 6 Beine mit variabler Länge oder bewegten Gelenken wirken auf eine bewegte Plattform | 3 XY-Tische wirken parallel auf eine bewegte Plattform |
| Geometrie | Kompakte Grundfläche | Niedrige Bauhöhe |
| Lineare Stellwege in der Ebene | Begrenzt | Flexibel durch Wahl der XY-Versteller |
| Linearer vertikaler Stellweg | Groß | Begrenzt |
| Rotatorische Stellwege | Große Verkippung um die X- und Y-Achse möglich | Begrenzt |
| Steifigkeit | Hohe vertikale Steifigkeit | Hohe Steifigkeit in X und Y |
![[Translate to German:] Advantages of Parallel Kinematics Compared to Serial Set-Ups](/fileadmin/_processed_/7/f/csm_Advantages_of_Parallel_Kinematics_Compared_to_Serial_Set-Up_b63e5488d7.jpg "Parallelkinematik")
| Parallelkinematik | Serielles, gestapeltes Design | |
|---|---|---|
| Abmessungen | Kompakter Aufbau | Relativ hoher Aufbau, Stabilisierung am "Fundament" erforderlich |
| Bewegte Masse | Plattform plus Last | Jeder Versteller trägt die weiter "oben" platzierten plus die Last und muss entsprechend ausgelegt werden. |
| Dynamik /Steifigkeit | Aufgrund der geringen bewegten Masse relativ hoch, für alle Bewegungsachsen gleich | Dynamische Achsen sollten möglichst weit "oben" platziert werden |
| Genauigkeit | Für alle Bewegungsachsen gleich | Fehleraufsummierung von "unten" nach "oben", hohe Parallaxenfehler durch Höhe des Aufbaus |
| Kabelmanagement | Keine bewegten Kabel, kein Einfluss auf die Genauigkeit | Erforderlich |
| Kommandierung | PI Motion Controller ermöglichen die Kommandierung in kartesischen Koordinaten und nehmen die Transformation der Bewegung der Einzelbeine vor | Kartesisch für alle Achsen individuell |
| Pivotpunkt (Drehpunkt) | Frei wählbar im Raum durch PI Software | Festgelegt durch die Auswahl der Verstellergeometrien |
| Arbeitsraum | Grundsätzlich eingeschränkt | Festgelegt durch die Auswahl der Verstellergeometrien |
Hexapoden in der Automatisierung: Ansteuerung und Schnittstellen für einfache Integration

Präzise Bahnsteuerung mit Ruckbegrenzung
Mit Hilfe des Hexapodcontrollers ist eine Bewegung auf der Basis komplexer Trajektorien mit definierter Bahngeschwindigkeit und Beschleunigung möglich. So können Hexapoden im Maschinenbau beispielsweise Werkstücke oder Werkzeuge während der Bearbeitung mit großer Präzision ruckbegrenzt verfahren, ohne dass die Mechanik ins Schwingen kommt.
Benutzerdefinierte Koordinatensysteme
Um eine perfekte Anpassung der Trajektorie an die Applikationserfordernisse zu gewährleisten, ist es möglich mit Hilfe des Controllers verschiedene Koordinatensysteme zu definieren, beispielsweise Work- und Toolkoordinatensysteme, die sich auf die Lage des Werkstücks oder des Werkzeugs beziehen. Das ist vorteilhaft in der industriellen Automatisierung, aber auch für Fiber-Alignment-Aufgaben.
Schnittstellen
EtherCAT Interface: Über standardisierte >> Feldbusschnittstellen ist die Anbindung an übergeordnete SPS- oder CNC-Steuerungen möglich. Dadurch können die Hexapoden mit anderen Automatisierungskomponenten taktsynchron im Verbund arbeiten.
