L-509.021100V6
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁶ hPa
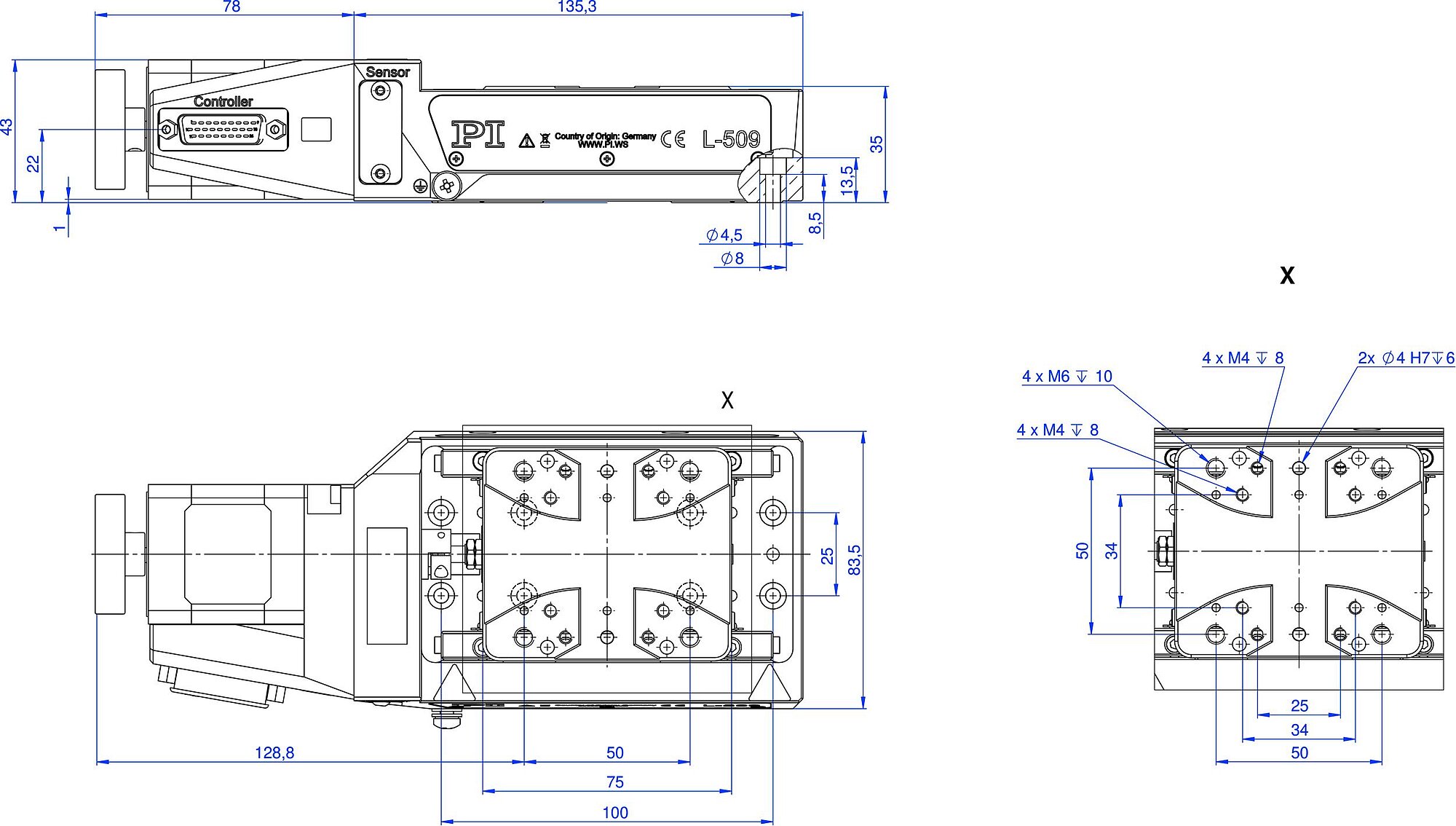
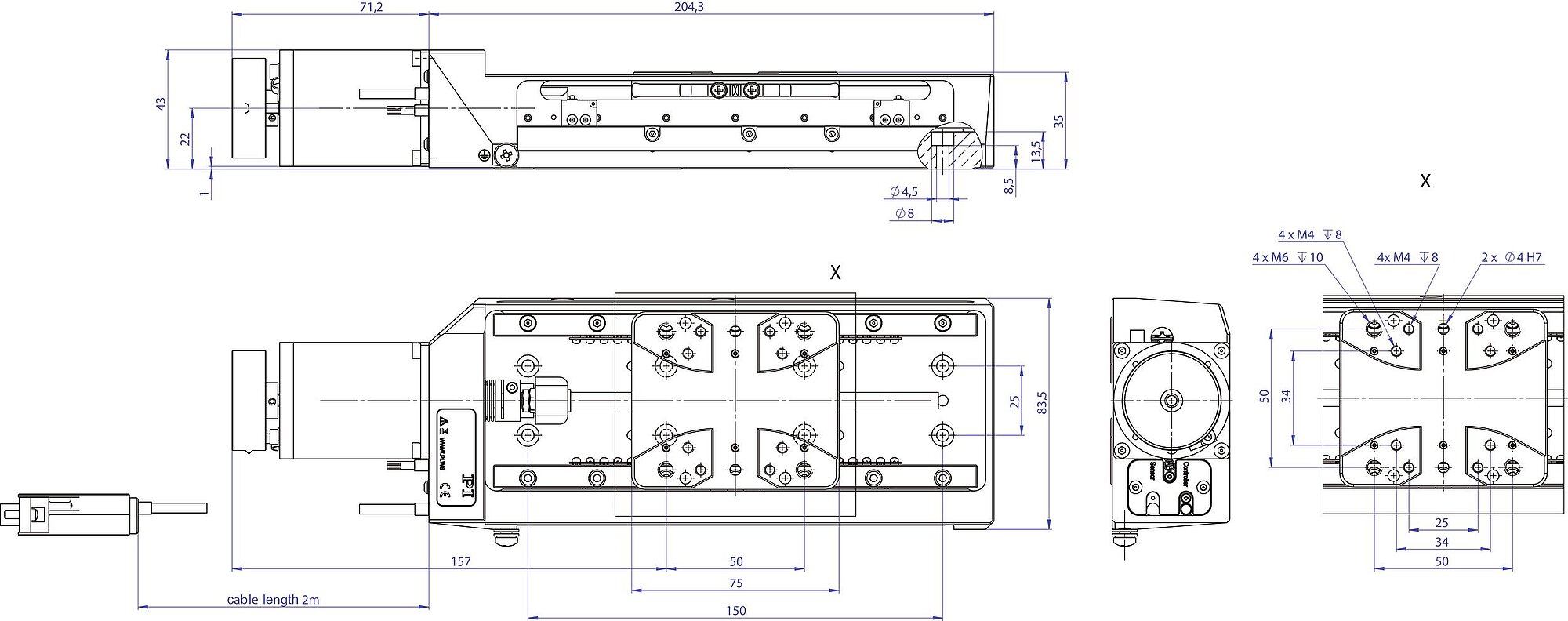
L-509.021100V6, Abmessungen in mm
L-509.031600V9, Abmessungen in mm
L-509.051300V7, Abmessungen in mm
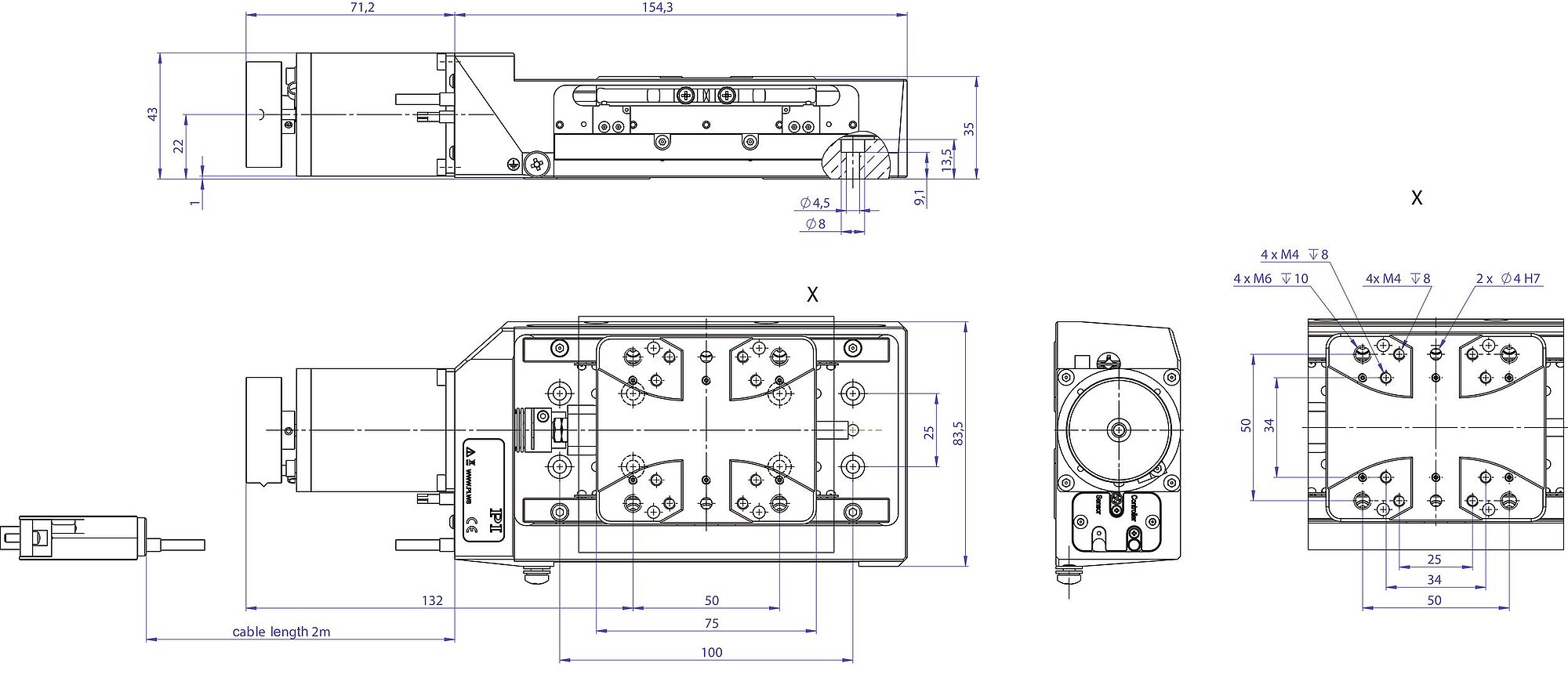
L-509.031300V7, Abmessungen in mm
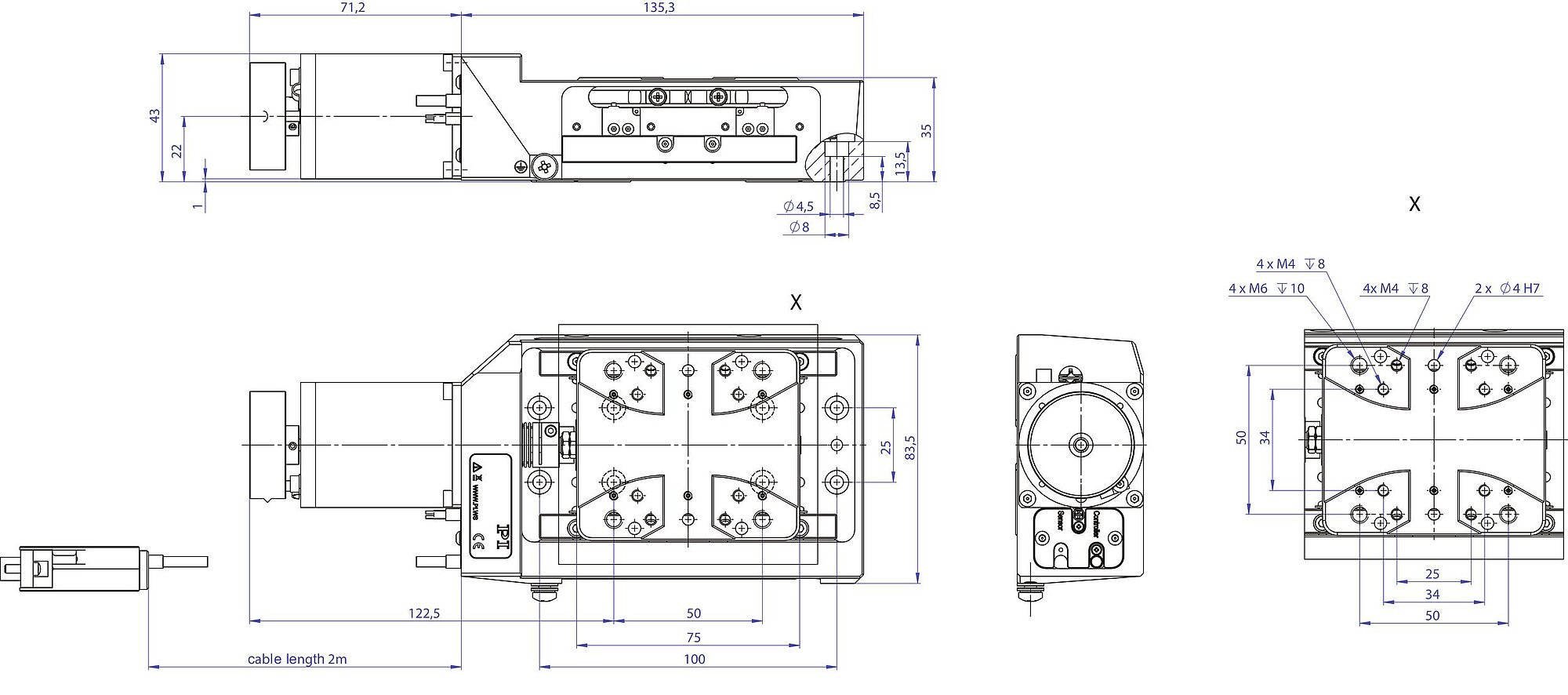
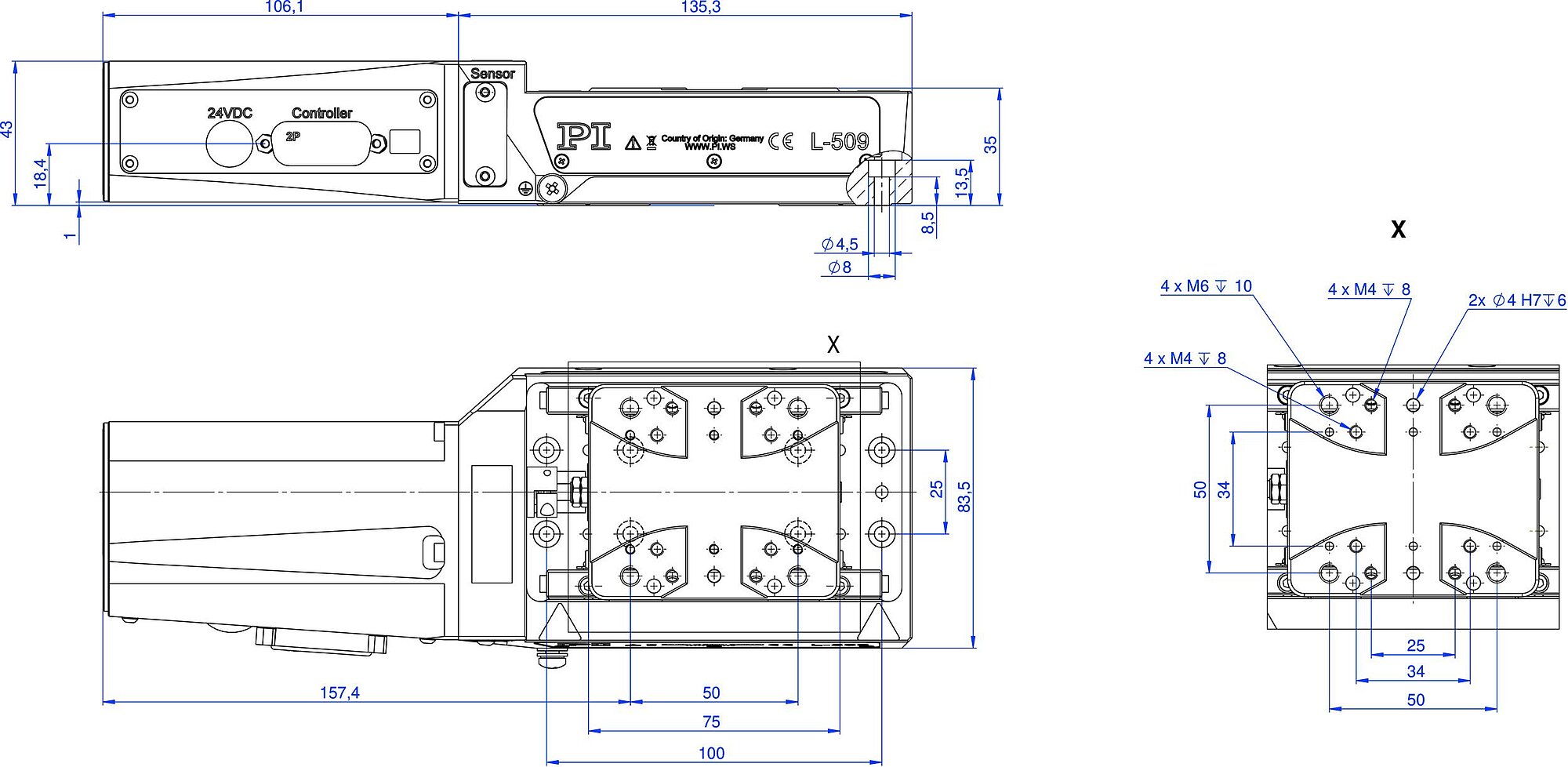
L-509.021300V7, Abmessungen in mm

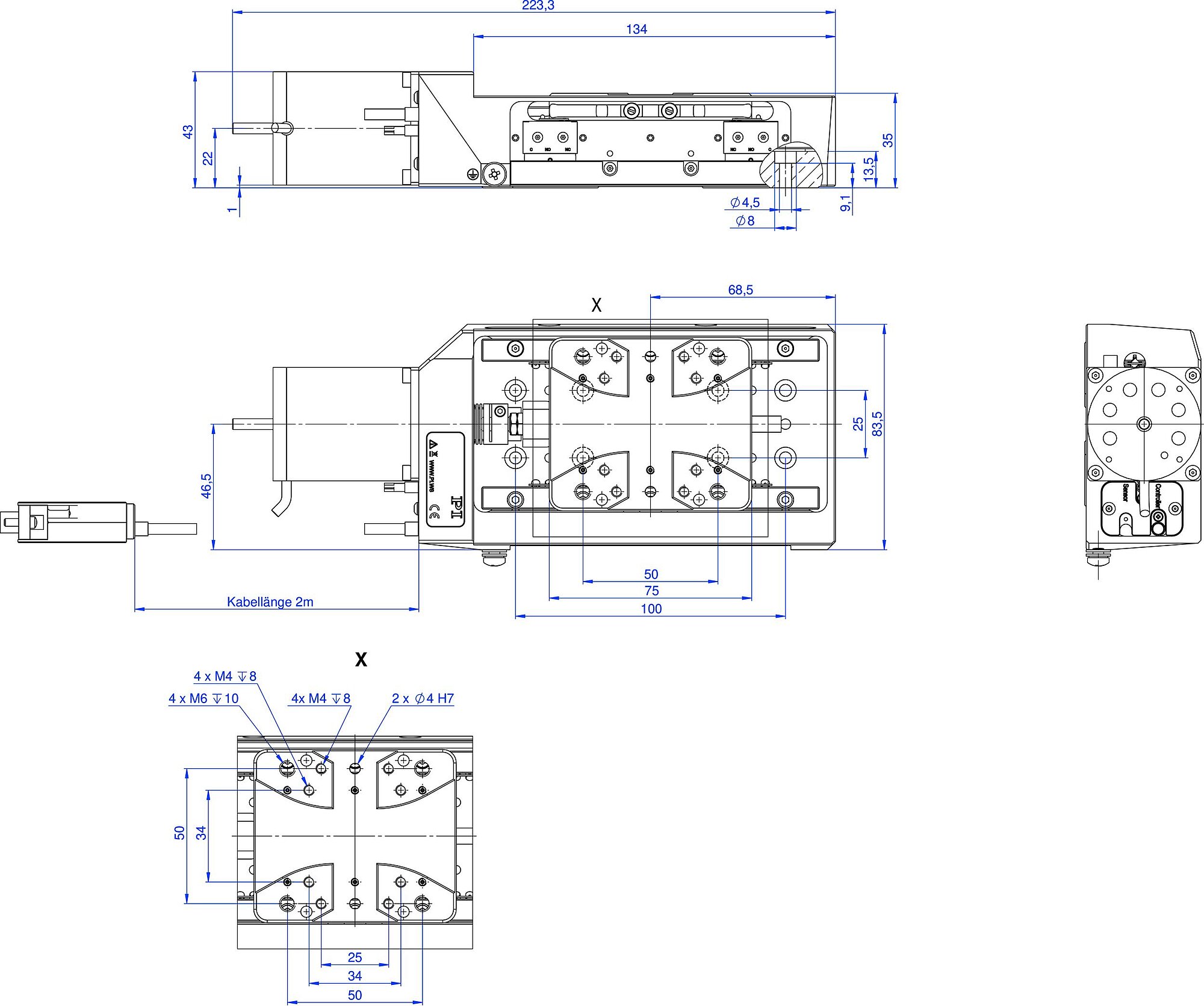
L-509.054132V6, Abmessungen in mm

L-509.034132V6, Abmessungen in mm
L-509.024132V6, Abmessungen in mm

L-509.051100V6, Abmessungen in mm

L-509.031100V6, Abmessungen in mm

L-509.051600V9, Abmessungen in mm












Produktübersicht
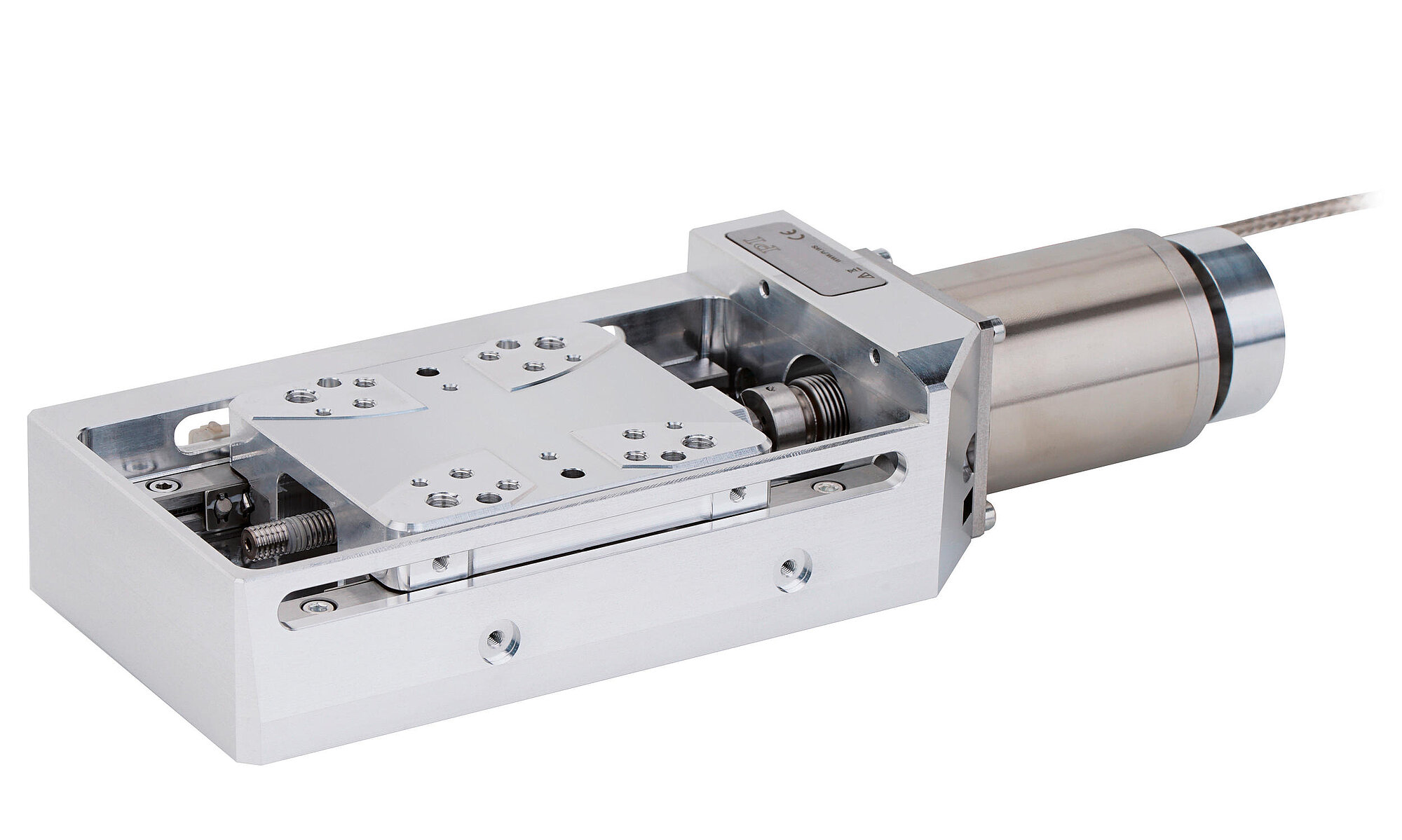
Hohe Ablaufgenauigkeit und Belastbarkeit durch Kreuzrollenführungen mit Käfig-Zwangsführung. Präzisions-Kugelumlaufspindel mit 1 mm Steigung. Kompaktes Design. Grundprofil aus entspanntem Aluminium für hohe Stabilität. Endschalter. Kontaktloser optischer Referenzschalter mit Richtungserkennung in der Mitte des Stellwegs.
Reduziertes Ausgasen speziell für den Einsatz in Vakuumumgebung
Insbesondere die Schmierung der Führung und der Spindel ist mit einem besonders ausgasarmen Stoff durchgeführt. Damit kann eine Ausheiztemperatur bis 80 °C erreicht werden. Durch diese und weitere Modifikationen der PI Vakuumklasse V6 kann dieser Positionierer bei bis zu 10-6 hPa verwendet werden.
Höhere Güte für Anwendungen im Hochvakuum
Hier werden spezielle hochvakuumgeeignete Komponenten eingesetzt, wie Motor, Messsystem und Endschalter. Zusätzlich ist die Oberfläche aus blankem Aluminium, Spindeln und Führungen sind aus Edelstahl. Dadurch wird die PI Vakuumklasse V7 erreicht, d. h. bis zu 10-7 hPa.
Höchste Güte für spezielle Anforderungen im Ultrahochvakuum
In dieser Vakuumklasse wird das Produkt durch ultrahochvakuumgeeignete Komponenten und in allen Details optimiert, um die PI Vakuumklasse V9 bis zu 10-9 hPa zu erreichen. Dafür werden unter anderem nur ausgewählte Kunststoffarten und eine Ausheiztemperatur von 120 °C mit Messsystem bzw. von 150 °C ohne Messsystem verwendet.
Erhältliche Motortypen
Arten der Positionsmessung
Einsatzgebiete
Vakuumkammern. Forschung. Beamline-Instrumentierung. Mikroskopie. Elektronikmontage und -inspektion.
| Bewegen | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 52 mm | 102 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 10 mm/s | 10 mm/s | 10 mm/s | 1,5 mm/s | 1,5 mm/s | 1,5 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | 10 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 4 µm | ± 8 µm | typ. |
| Geradheitsabweichung in Z (Ebenheit) | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 2 µm | ± 4 µm | ± 8 µm | ± 4 µm | ± 8 µm | typ. |
| Winkelabweichung um Y (Nicken) | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 90 µrad | ± 120 µrad | typ. |
| Winkelabweichung um Z (Gieren) | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 60 µrad | ± 90 µrad | ± 120 µrad | ± 90 µrad | ± 120 µrad | typ. |
| Positionieren | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | Toleranz |
| Kleinste Schrittweite in X | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | ± 0,05 µm | ± 0,05 µm | ± 0,05 µm | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | ± 0,15 µm | typ. |
| Endschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Mechanisch | Mechanisch | Mechanisch | Mechanisch | Mechanisch | |
| Sensorsignal Motorencoder | — | — | — | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | — | — | — | — | — | |
| Motorencoder | — | — | — | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | — | — | — | — | — | |
| Antriebseigenschaften | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | Toleranz |
| Antriebstyp | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | DC-Getriebemotor | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | |
| Nennspannung | 24 V | 24 V | 24 V | 12 V | 12 V | 12 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Maximale Leistungsaufnahme | 10 W | 10 W | 10 W | — | — | — | 10 W | 10 W | 10 W | 10 W | 10 W | |
| Motorauflösung | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | — | — | — | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | |
| Antriebskraft in positiver Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| Antriebskraft in negativer Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | 60 N | typ. |
| Widerstand Phase-Phase | 3,3 Ω | 3,3 Ω | 3,3 Ω | 4,09 Ω | 4,09 Ω | 4,09 Ω | 1,7 Ω | 1,7 Ω | 1,7 Ω | 1,7 Ω | 1,7 Ω | typ. |
| Induktivität Phase-Phase | 2,8 mH | 2,8 mH | 2,8 mH | 0,18 mH | 0,18 mH | 0,18 mH | 3 mH | 3 mH | 3 mH | 3 mH | 3 mH | |
| Gegen-EMK Phase-Phase, rotatorisch | — | — | — | 1,68 V/kRPM | 1,68 V/kRPM | 1,68 V/kRPM | — | — | — | — | — | max. |
| Mechanische Eigenschaften | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | Toleranz |
| Zulässige Druckkraft in Y | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | max. |
| Zulässige Druckkraft in Z | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| Zulässiges Moment in θX | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | 30 N·m | max. |
| Zulässiges Moment in θY | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | 25 N·m | max. |
| Zulässiges Moment in θZ | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | 20 N·m | max. |
| Haltekraft in X, passiv | 50 N | 50 N | 50 N | — | — | — | 50 N | 50 N | 50 N | 30 N | 30 N | |
| Bewegte Masse in X, unbelastet | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | 220 g | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | |
| Getriebeuntersetzung i | — | — | — | 2401 : 81 | 2401 : 81 | 2401 : 81 | — | — | — | — | — | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | |
| Gesamtmasse | 1400 g | 1500 g | 1700 g | 1100 g | 1200 g | 1500 g | 1000 g | 1100 g | 1600 g | 1400 g | 1600 g | |
| Material | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | |
| Anschlüsse und Umgebung | L-509.021100V6 | L-509.031100V6 | L-509.051100V6 | L-509.024132V6 | L-509.034132V6 | L-509.054132V6 | L-509.021300V7 | L-509.031300V7 | L-509.051300V7 | L-509.031600V9 | L-509.051600V9 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Vakuumklasse | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁶ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁷ ǀ hPa | 10⁻⁹ ǀ hPa | 10⁻⁹ ǀ hPa | |
| Maximale Ausheiztemperatur | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 80 °C | 150 °C | 150 °C | |
| Anschluss | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | D-Sub 15 (w) | D-Sub 15 (w) | D-Sub 15 (w) | D-Sub 15 (w) | D-Sub 15 (w) | |
| Kabellänge | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | |
| Empfohlene Controller/Treiber | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 Modularer ACS-Controller | C-863 C-885 mit C-863.20C885 C-884 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 G-901 G-910 Modularer ACS-Controller |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
This document describes the following precision linear positioner, vacuum-compatible 1 E-7 hPa: L-509.0x1300V7; L-509.0x1311V7
L-509 Vacuum-Compatible Precision Linear Positioner (1E-9 hPa)
L-509 Vakuumtauglicher Präzisions-Lineartisch (1 E-6 hPa)
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; DC-Getriebemotor; 26 mm Stellweg; 100 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; DC-Getriebemotor; 52 mm Stellweg; 100 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; DC-Getriebemotor; 102 mm Stellweg; 100 N Belastbarkeit; 1,5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, A/B-Quadratur, RS-422; vakuumkompatibel bis 10⁻⁶ hPa
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁷ hPa; 2 m Kabellänge
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁷ hPa; 2 m Kabellänge
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁷ hPa; 2 m Kabellänge
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁹ hPa; 2 m Kabellänge
Vakuumgeeigneter Präzisions-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 10 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; vakuumkompatibel bis 10⁻⁹ hPa; 2 m Kabellänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Sorgfältige Handhabung und adäquate Räumlichkeiten: PI verfügt nicht nur über die Ausstattung zur Qualifizierung von Materialien, Komponenten und Endprodukten, sondern auch über langjährige Erfahrung im Bereich der HV- und UHV-Positioniersysteme.

Die drehenden Elektromotoren, wie zum Beispiel DC- oder Schrittmotoren, werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt.