L-812.051400
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
L-812.099432BF
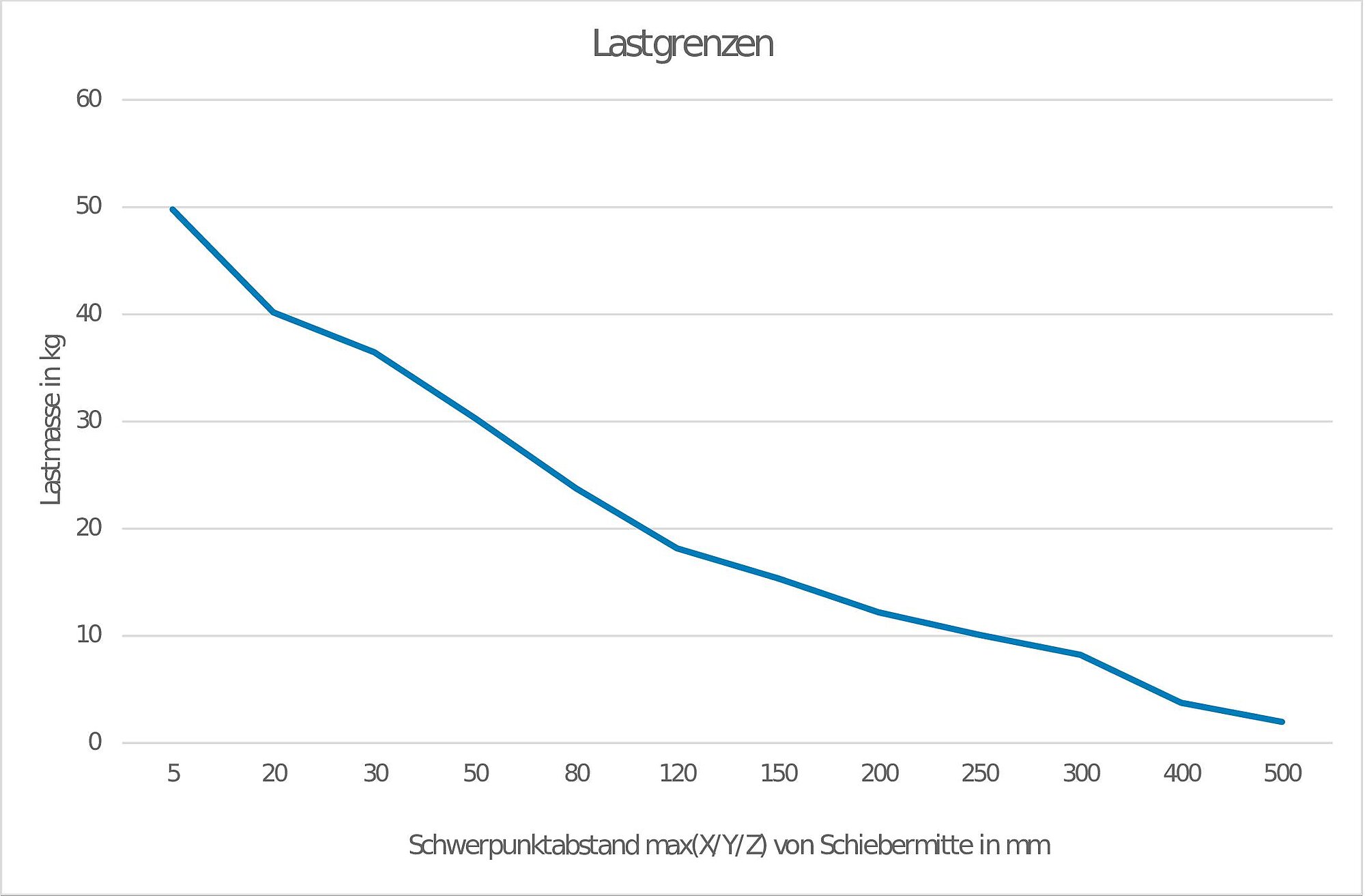
Belastungsgrenze des L-812 in Abhängigkeit von Lastmasse und Abstand des Lastschwerpunkts von der Schiebermitte
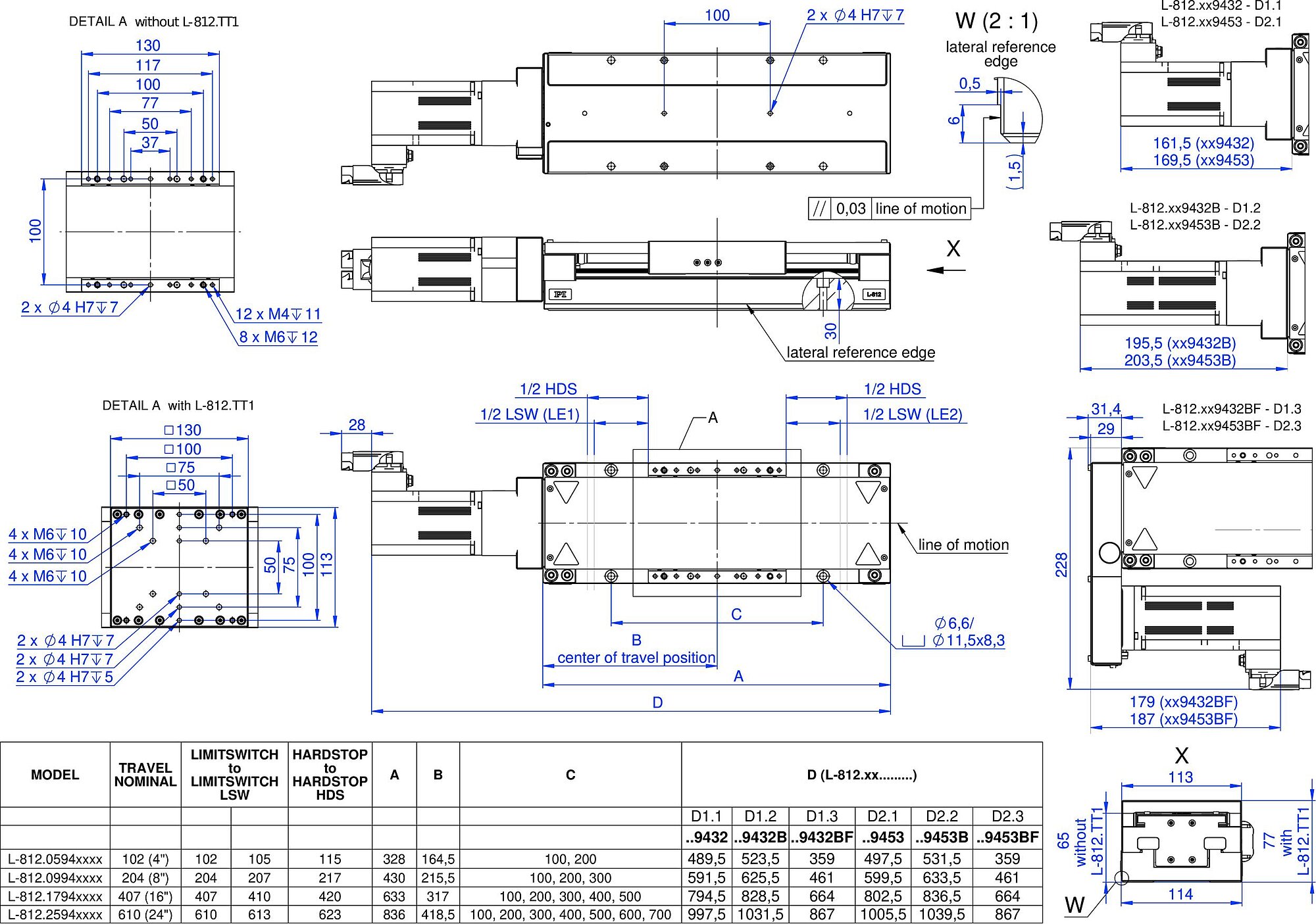
L-812.xx94xx[B[F]], Abmessungen in mm
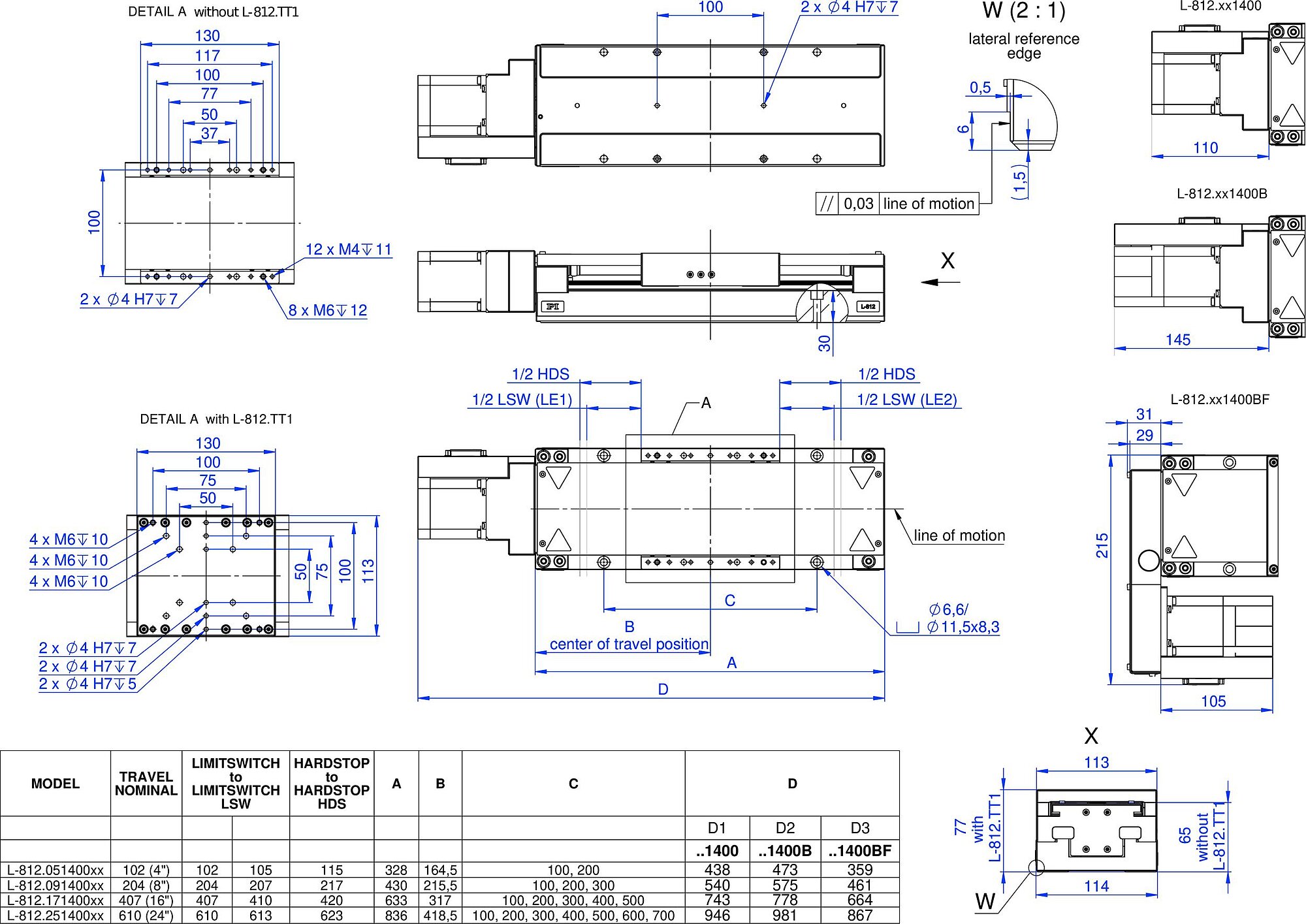
L-812.xx1400[B[F]], Abmessungen in mm
L-812.179432 mit montierter Bewegungsplattform L-812.TT1

L-812 XY-Kombination mit optionaler Bewegungsplattform L-812.TT1 auf dem oberen Positionierer
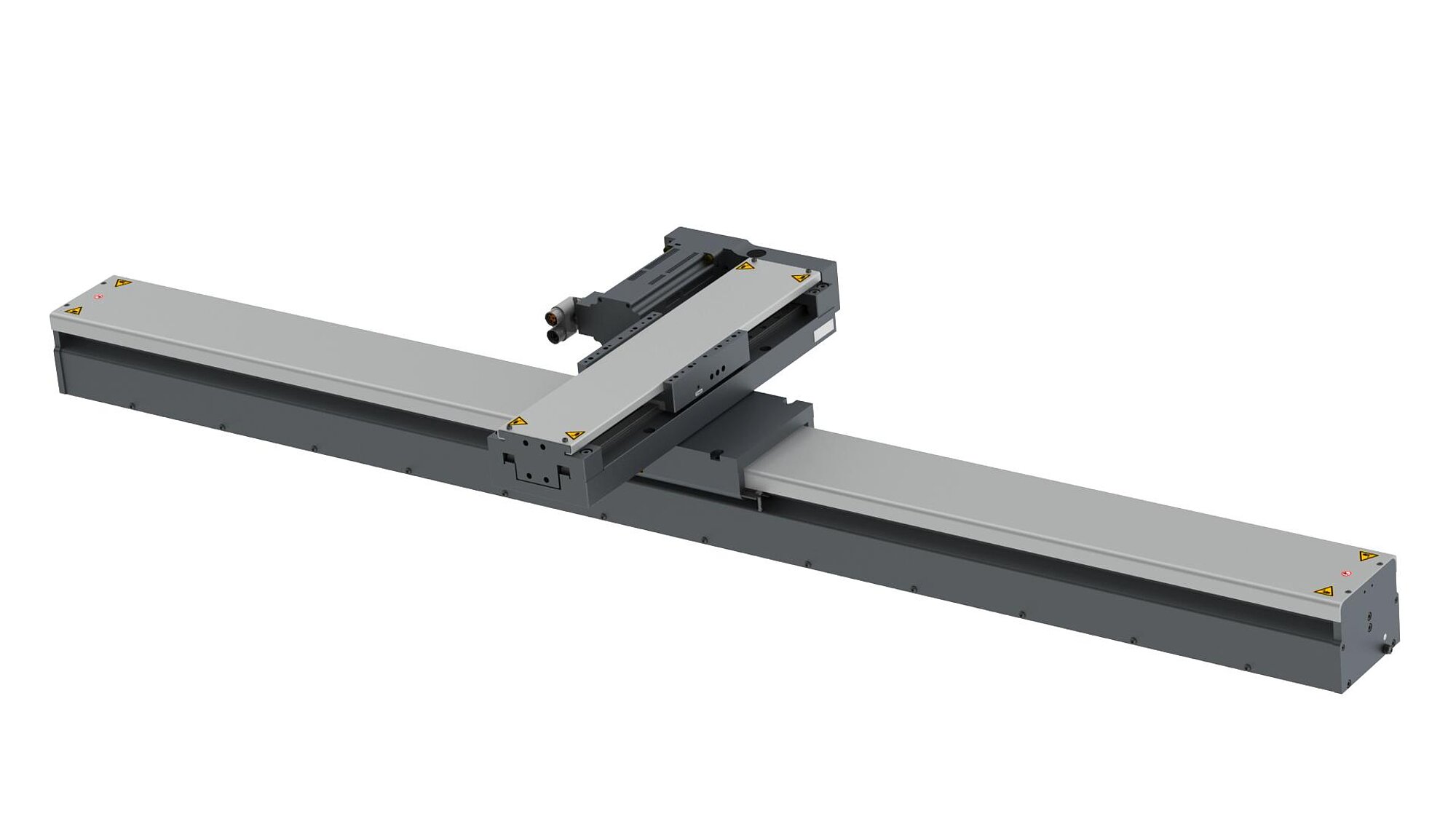
XY-Kombination aus V-857.586211E0 (unten) und L-812.099432BF (oben)
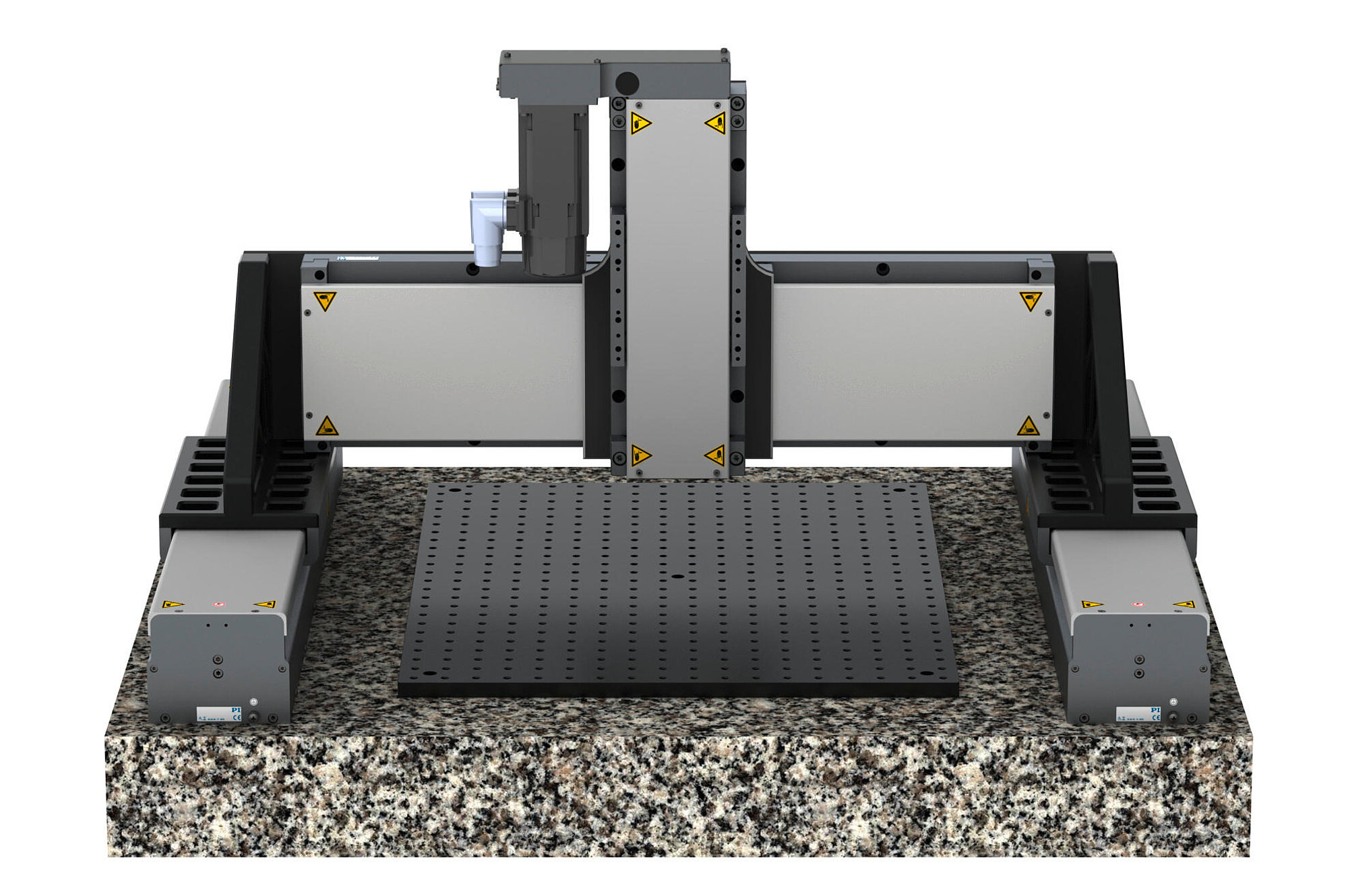
Gantry-Aufbau aus zwei V-857, zwei V-817 und einem L-812






Leistungsstarker Lineartisch für den Einsatz in anspruchsvollen Industrieapplikationen
Präzise Kugelumlaufspindeln, leistungsfähige Schritt- oder Synchron-Servomotoren, hochbelastbare Kugelumlaufführungen und präzise Rotationsencoder ermöglichen den dauerhaften und zuverlässigen Betrieb unter Hochlast. Die optionale Haltebremse ermöglicht den Einsatz als Z-Achse. Die Kugelumlaufspindel ist von außen ohne Demontage nachschmierbar, für hohe Zuverlässigkeit und lange Lebensdauer.
Wegweisende Bauweise
Die Kugelumlaufführungen der L-812-Serie sind auf hohe Belastbarkeit und hohe Dynamik ausgelegt. Mit ihrer hohen Auflösung ermöglichen die Motoren verbessertes Führungsverhalten, kleinere Folgefehler und kürzere Einschwingzeiten.
Synchron-Servomotor
Diese Motoren verfügen über hohe Positioniergenauigkeit und Überlastfähigkeit in einem großen Drehzahlbereich. Hohes Drehmoment und geringe bewegte Eigenmassen sorgen für eine hohe Dynamik der Antriebe. Die lange Lebensdauer, hohe Leistung und Robustheit dieser Motoren ermöglichen hervorragende Ergebnisse in Anwendungen der industriellen Automatisierung.
Schrittmotor
Leistungsstarke und vibrationsarme 2-Phasen-Schrittmotoren ermöglichen präzise Positionierung auch ohne Positionsregelung.
Optionen
Einsatzgebiete
| Bewegen | L-812.051400 | L-812.051400B | L-812.051400BF | L-812.091400 | L-812.091400B | L-812.091400BF | L-812.171400 | L-812.171400B | L-812.171400BF | L-812.251400 | L-812.251400B | L-812.251400BF | L-812.059432 | L-812.059432B | L-812.059432BF | L-812.099432 | L-812.099432B | L-812.099432BF | L-812.139432 | L-812.179432 | L-812.179432B | L-812.179432BF | L-812.259432 | L-812.259432B | L-812.259432BF | L-812.059453 | L-812.059453B | L-812.059453BF | L-812.099453 | L-812.099453B | L-812.099453BF | L-812.179453 | L-812.179453B | L-812.179453BF | L-812.259453 | L-812.259453B | L-812.259453BF | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 102 mm | 102 mm | 102 mm | 204 mm | 204 mm | 204 mm | 407 mm | 407 mm | 407 mm | 610 mm | 610 mm | 610 mm | 102 mm | 102 mm | 102 mm | 204 mm | 204 mm | 204 mm | 304 mm | 407 mm | 407 mm | 407 mm | 610 mm | 610 mm | 610 mm | 102 mm | 102 mm | 102 mm | 204 mm | 204 mm | 204 mm | 407 mm | 407 mm | 407 mm | 610 mm | 610 mm | 610 mm | |
| Beschleunigung in X, unbelastet | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | 10 m/s² | max. |
| Maximale Geschwindigkeit in X, unbelastet | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 100 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | 300 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | max. |
| Geradheitsabweichung in Z (Ebenheit) | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 6 µm | ± 6 µm | ± 6 µm | ± 10 µm | ± 10 µm | ± 10 µm | ± 14 µm | ± 14 µm | ± 14 µm | max. |
| Winkelabweichung um Y (Nicken) | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 28,5 µrad | ± 28,5 µrad | ± 28,5 µrad | ± 58,5 µrad | ± 58,8 µrad | ± 58,5 µrad | ± 88,5 µrad | ± 88,5 µrad | ± 88,5 µrad | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 29 µrad | ± 29 µrad | ± 29 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 87 µrad | ± 87 µrad | ± 87 µrad | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 29 µrad | ± 29 µrad | ± 29 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 87 µrad | ± 87 µrad | ± 87 µrad | max. |
| Winkelabweichung um Z (Gieren) | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 27 µrad | ± 27 µrad | ± 27 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 87 µrad | ± 87 µrad | ± 87 µrad | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 29 µrad | ± 29 µrad | ± 29 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 87 µrad | ± 87 µrad | ± 87 µrad | ± 21 µrad | ± 21 µrad | ± 21 µrad | ± 29 µrad | ± 29 µrad | ± 29 µrad | ± 59 µrad | ± 59 µrad | ± 59 µrad | ± 87 µrad | ± 87 µrad | ± 87 µrad | max. |
| Positionieren | L-812.051400 | L-812.051400B | L-812.051400BF | L-812.091400 | L-812.091400B | L-812.091400BF | L-812.171400 | L-812.171400B | L-812.171400BF | L-812.251400 | L-812.251400B | L-812.251400BF | L-812.059432 | L-812.059432B | L-812.059432BF | L-812.099432 | L-812.099432B | L-812.099432BF | L-812.139432 | L-812.179432 | L-812.179432B | L-812.179432BF | L-812.259432 | L-812.259432B | L-812.259432BF | L-812.059453 | L-812.059453B | L-812.059453BF | L-812.099453 | L-812.099453B | L-812.099453BF | L-812.179453 | L-812.179453B | L-812.179453BF | L-812.259453 | L-812.259453B | L-812.259453BF | Toleranz |
| Kleinste Schrittweite in X | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 3 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | 1,5 µm | max. |
| Positioniergenauigkeit in X, unkalibriert | ± 20 µm | ± 20 µm | ± 20 µm | ± 25 µm | ± 25 µm | ± 25 µm | ± 30 µm | ± 30 µm | ± 30 µm | ± 35 µm | ± 35 µm | ± 35 µm | ± 20 µm | ± 20 µm | ± 20 µm | ± 25 µm | ± 25 µm | ± 25 µm | ± 30 µm | ± 30 µm | ± 30 µm | ± 30 µm | ± 35 µm | ± 35 µm | ± 35 µm | ± 20 µm | ± 20 µm | ± 20 µm | ± 25 µm | ± 25 µm | ± 25 µm | ± 30 µm | ± 30 µm | ± 30 µm | ± 35 µm | ± 35 µm | ± 35 µm | max. |
| Bidirektionale Wiederholgenauigkeit in X | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | max. |
| Endschalter | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | Induktiv, Öffner, 5 V, NPN | |
| Integrierter Sensor | — | — | — | — | — | — | — | — | — | — | — | — | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | Absoluter Rotationsencoder, Multiturn | |
| Sensorsignal Motorencoder | — | — | — | — | — | — | — | — | — | — | — | — | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | BiSS-C | |
| Auflösung Motorencoder | — | — | — | — | — | — | — | — | — | — | — | — | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | 10000 Impulse/U | — | — | — | — | — | — | — | — | — | — | — | — | |
| Auflösung Motorencoder, Bitbreite | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | 24 Bit | |
| Anzahl Umdrehungen Motorencoder, Bitbreite | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | 12 Bit | |
| Antriebseigenschaften | L-812.051400 | L-812.051400B | L-812.051400BF | L-812.091400 | L-812.091400B | L-812.091400BF | L-812.171400 | L-812.171400B | L-812.171400BF | L-812.251400 | L-812.251400B | L-812.251400BF | L-812.059432 | L-812.059432B | L-812.059432BF | L-812.099432 | L-812.099432B | L-812.099432BF | L-812.139432 | L-812.179432 | L-812.179432B | L-812.179432BF | L-812.259432 | L-812.259432B | L-812.259432BF | L-812.059453 | L-812.059453B | L-812.059453BF | L-812.099453 | L-812.099453B | L-812.099453BF | L-812.179453 | L-812.179453B | L-812.179453BF | L-812.259453 | L-812.259453B | L-812.259453BF | Toleranz |
| Antriebstyp | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | Synchron-Servomotor | |
| Nennspannung | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | 310 V | |
| Nennstrom, effektiv | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | 1,5 A | typ. |
| Spitzenstrom, effektiv | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | typ. |
| Maximale Leistungsaufnahme | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | 10 W | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | |
| Motorauflösung | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | — | |
| Antriebskraft in X | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 377 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | 800 N | typ. |
| Drehmomentkonstante | — | — | — | — | — | — | — | — | — | — | — | — | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | 0,43 N·m/A | typ. |
| Widerstand Phase-Phase | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 0,5 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | 10,1 Ω | typ. |
| Induktivität Phase-Phase | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 1,2 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | 17,5 mH | |
| Gegen-EMK Phase-Phase, rotatorisch | — | — | — | — | — | — | — | — | — | — | — | — | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | 14,5 V/kRPM | max. |
| Polpaarzahl | — | — | — | — | — | — | — | — | — | — | — | — | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Mechanische Eigenschaften | L-812.051400 | L-812.051400B | L-812.051400BF | L-812.091400 | L-812.091400B | L-812.091400BF | L-812.171400 | L-812.171400B | L-812.171400BF | L-812.251400 | L-812.251400B | L-812.251400BF | L-812.059432 | L-812.059432B | L-812.059432BF | L-812.099432 | L-812.099432B | L-812.099432BF | L-812.139432 | L-812.179432 | L-812.179432B | L-812.179432BF | L-812.259432 | L-812.259432B | L-812.259432BF | L-812.059453 | L-812.059453B | L-812.059453BF | L-812.099453 | L-812.099453B | L-812.099453BF | L-812.179453 | L-812.179453B | L-812.179453BF | L-812.259453 | L-812.259453B | L-812.259453BF | Toleranz |
| Zulässige Druckkraft in Y | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | 250 N | max. |
| Zulässige Druckkraft in Z | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | 500 N | max. |
| Haltekraft in X, passiv | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | — | 500 N | 500 N | |
| Bewegte Masse in X, unbelastet | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | 2800 g | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | 5 mm | |
| Führung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | |
| Gesamtmasse | 6800 g | 6900 g | 7000 g | 7800 g | 7900 g | 8000 g | 9900 g | 10000 g | 10100 g | 11900 g | 12000 g | 12100 g | 7300 g | 7400 g | 7500 g | 8300 g | 8400 g | 8500 g | 10400 g | 10400 g | 10500 g | 10600 g | 12500 g | 12600 g | 12700 g | 7300 g | 7400 g | 7500 g | 8300 g | 8400 g | 8500 g | 10400 g | 10500 g | 10600 g | 12500 g | 12600 g | 12700 g | |
| Material | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | Aluminium, schwarz eloxiert; Edelstahl | |
| Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | — | Elektromagnetische Haltebremse | Elektromagnetische Haltebremse | |
| Anschlüsse und Umgebung | L-812.051400 | L-812.051400B | L-812.051400BF | L-812.091400 | L-812.091400B | L-812.091400BF | L-812.171400 | L-812.171400B | L-812.171400BF | L-812.251400 | L-812.251400B | L-812.251400BF | L-812.059432 | L-812.059432B | L-812.059432BF | L-812.099432 | L-812.099432B | L-812.099432BF | L-812.139432 | L-812.179432 | L-812.179432B | L-812.179432BF | L-812.259432 | L-812.259432B | L-812.259432BF | L-812.059453 | L-812.059453B | L-812.059453BF | L-812.099453 | L-812.099453B | L-812.099453BF | L-812.179453 | L-812.179453B | L-812.179453BF | L-812.259453 | L-812.259453B | L-812.259453BF | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | |
| Anschluss Motorencoder | — | — | — | — | — | — | — | — | — | — | — | — | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | |
| Schmiernippel der Spindel | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | M6 | |
| Empfohlene Controller/Treiber | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | C-663 G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller | G-901 G-910 Modularer ACS-Controller |
Hinweis zur maximalen Geschwindigkeit für L-812.xx14xxxx: Zum Erreichen der maximalen Geschwindigkeit ist ein G-9xx Controller oder ein modularer ACS-Controller erforderlich.
Hinweis zur maximalen Geschwindigkeit für L-812.xx1400B / L-812.xx1400BF: Bei vertikaler Montage: 40 mm/s
Hinweis zur maximalen Geschwindigkeit für L-812.xx94xx[B|BF]: Zum Erreichen der maximalen Geschwindigkeit ist ein Controller mit 320 V DC Zwischenkreisspannung erforderlich. Mit dieser Zwischenkreisspannung wird die maximale Geschwindigkeit nicht nur im unbelasteten Zustand, sondern auch unter Volllast (50 kg) errreicht.
Hinweis zur rechnerischen Auflösung für L-812.xx1400[B|BF]: Wert gültig für Vollschrittbetrieb (Vollschritte von 1,8°)
Hinweis zur bewegten Masse: Mit Plattform L-812.TT1: 3,4 kg
Hinweis zur zulässigen Druckkraft in Z für L-812.xxxxxxB / L-812.xxxxxxBF: Bei vertikaler Montage: 300 N
Zu den zulässigen Momenten, mit denen der L-812 belastet werden kann: siehe Diagramm der Lastgrenzen.
Technische Daten werden auf einem Granittisch mit einer Ebenheit von ± 2 µm spezifiziert.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
L-812.xx9432 Hochlast-Lineartisch
L-812.xx1400 Lineartisch mit Schrittmotor
L-812.xx9453 Hochlast-Lineartisch
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 204 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 204 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 204 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 407 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 407 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 407 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 610 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 610 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse
Hochlast-Lineartisch; 2-Phasen-Schrittmotor; 610 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 304 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 102 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 204 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 407 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse
Hochlast-Lineartisch; Synchron-Servomotor bis 310 V; 610 mm Stellweg; 500 N Belastbarkeit; 300 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Absoluter Rotationsencoder, Multiturn; Elektromagnetische Haltebremse; gefalteter Antriebsstrang
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Drehende Elektromotoren wie DC- oder Schrittmotoren werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt. Dabei sind Schrittmotorlösungen mit hochauflösenden Encodern in der Lage, kleinste Schrittweiten von 10 Nanometern zuverlässig und wiederholbar auszuführen.
Beim Hybridkonzept von PI werden DC-Servomotor (Vorteil: große Stellwege) und Piezoantrieb (Vorteil: Nanometer-Genauigkeit) kombiniert.

Inspektions- und Fertigungssysteme der Halbleiterindustrie: mechanische Präzisionsführungen oder Luftlagertechnik mit magnetischen Linearmotoren.

Magnetische Direktantriebe bieten vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen.

Die drehenden Elektromotoren, wie zum Beispiel DC- oder Schrittmotoren, werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt.