L-741.131100
Präzisions-Kreuztisch; 2-Phasen-Schrittmotor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 45 mm/s × 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel

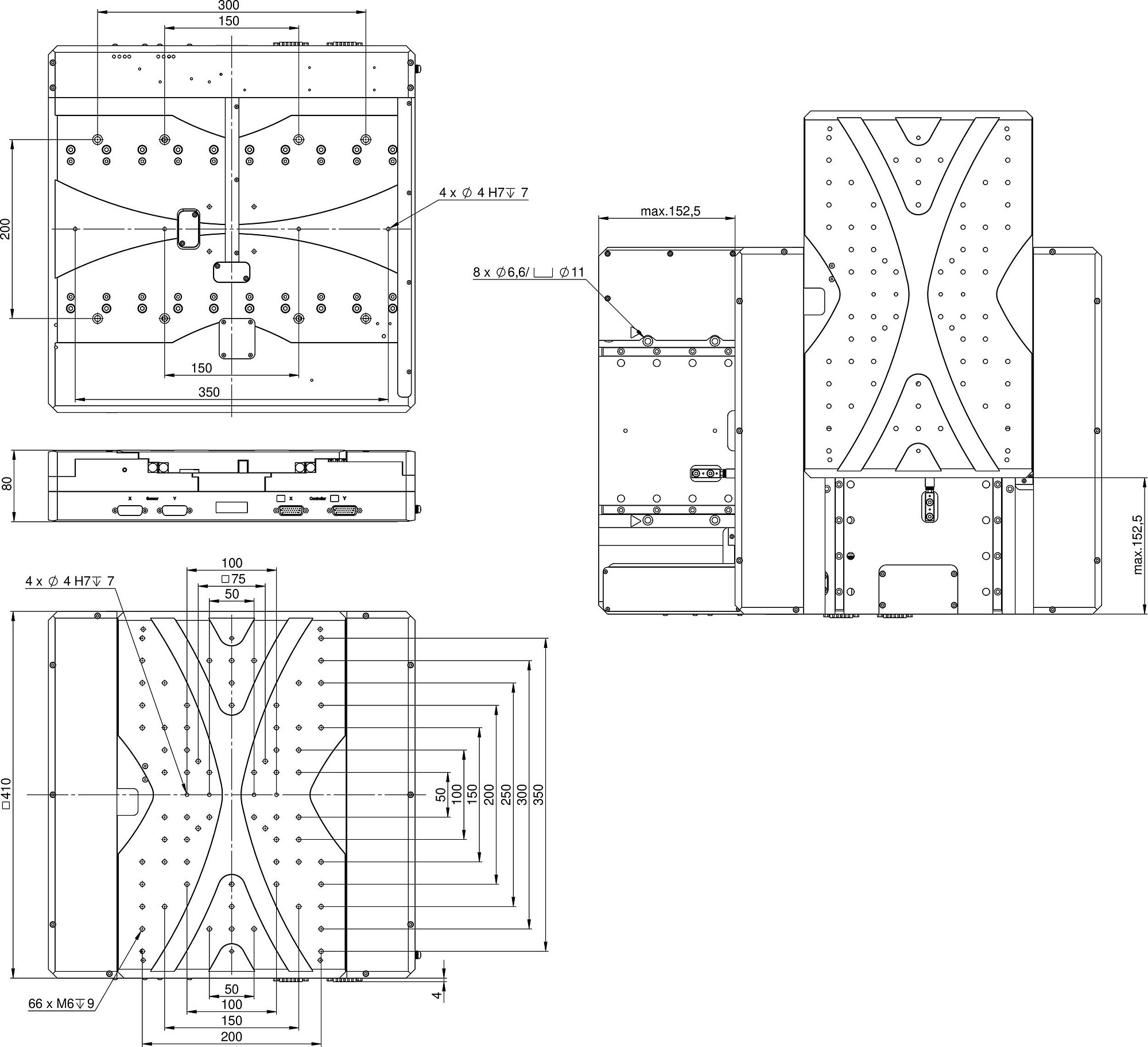
L-741.13x1xx, Abmessungen in mm


Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht. Optische End- und Referenzschalter. Weitere Stellwege auf Anfrage.
Kreuzrollenführung
Bei Kreuzrollenführungen wird der Punktkontakt der Kugeln in Kugelführungen durch den Linienkontakt gehärteter Rollen ersetzt. Sie sind dadurch wesentlich steifer und kommen mit geringerer Vorspannung aus, was die Reibung reduziert und einen gleichmäßigeren Lauf ermöglicht. Kreuzrollenführungen zeichnen sich darüber hinaus durch hohe Führungsgenauigkeit und Tragfähigkeit aus. Zwangsgesteuerte Wälzkörperkäfige verhindern Käfigwandern.
Antriebsarten
Einsatzgebiete
Medizinindustrie. Laserschneiden. Biotechnologie. Messtechnik. Laserbeschriftung.
| Bewegen | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Toleranz |
|---|---|---|---|---|---|---|---|
| Aktive Achsen | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | X ǀ Y | |
| Stellweg in X | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Stellweg in Y | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | 305 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Maximale Geschwindigkeit in Y, unbelastet | 45 mm/s | 45 mm/s | 45 mm/s | 50 mm/s | 50 mm/s | 90 mm/s | |
| Orthogonalität | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | ± 96 µrad | typ. |
| Geradheitsabweichung E_YX (Geradheit) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Geradheitsabweichung E_ZX (Ebenheit) | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | ± 4 µm | typ. |
| Winkelabweichung E_AY (Nicken) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Winkelabweichung E_BX (Nicken) | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | ± 75 µrad | typ. |
| Winkelabweichung E_CX (Gieren) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Winkelabweichung E_CY (Gieren) | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | ± 40 µrad | typ. |
| Positionieren | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Toleranz |
| Kleinste Schrittweite in X | 1 µm | 0,05 µm | 0,05 µm | 0,1 µm | 0,5 µm | 0,8 µm | typ. |
| Kleinste Schrittweite in Y | 1 µm | 0,05 µm | 0,05 µm | 0,1 µm | 0,5 µm | 0,8 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,05 µm | ± 0,025 µm | ± 0,025 µm | ± 0,05 µm | ± 0,25 µm | ± 0,4 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | ± 0,05 µm | ± 0,025 µm | ± 0,025 µm | ± 0,05 µm | ± 0,25 µm | ± 0,4 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in Y | 5 µm | 1 µm | 1 µm | 1 µm | 1 µm | 5 µm | typ. |
| Referenzschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Wiederholgenauigkeit des Referenzschalters | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | |
| Endschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Integrierter Sensor | — | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Rotationsencoder | |
| Sensorsignal | — | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | Sin/Cos, 1 V Spitze-Spitze | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | |
| Sensorsignalperiode | — | 20 µm | — | 20 µm | — | — | |
| Sensorauflösung | — | 1 nm | 10 nm | 1 nm | 10 nm | — | |
| Sensorauflösung | — | — | — | — | — | 20000 Impulse/U | |
| Antriebseigenschaften | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Toleranz |
| Antriebstyp | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | DC-Motor | DC-Motor | DC-Motor | |
| Betriebsspannung | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Nennstrom, effektiv | 1,2 A | 1,2 A | 1,2 A | 3,9 A | 3,9 A | 3,9 A | typ. |
| Motorauflösung | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | — | — | — | |
| Antriebskraft in X | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Antriebskraft in Y | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | typ. |
| Widerstand Phase-Phase | 3,4 Ω | 3,4 Ω | 3,4 Ω | 0,62 Ω | 0,62 Ω | 0,62 Ω | typ. |
| Mechanische Eigenschaften | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Toleranz |
| Zulässige Druckkraft in Z | 200 N | 200 N | 200 N | 200 N | 200 N | 200 N | max. |
| Zulässiges Moment in θX | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Zulässiges Moment in θY | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Zulässiges Moment in θZ | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | 125 N·m | max. |
| Bewegte Masse in X, unbelastet | 19900 g | 19900 g | 19900 g | 20200 g | 20200 g | 20200 g | |
| Bewegte Masse in Y, unbelastet | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | 6100 g | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | 2 mm | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | |
| Gesamtmasse | 27500 g | 27500 g | 27500 g | 28000 g | 28000 g | 28000 g | |
| Material | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | Aluminium, schwarz eloxiert | |
| Anschlüsse und Umgebung | L-741.131100 | L-741.131111 | L-741.131112 | L-741.133111 | L-741.133112 | L-741.133132 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | 2 × HD D-Sub 26 (m) | 2 × HD D-Sub 26 (m) | 2 × HD D-Sub 26 (m) | 2 × HD D-Sub 26 (m) | 2 × HD D-Sub 26 (m) | 2 × HD D-Sub 26 (m) | |
| Sensoranschluss | — | 2 × D-Sub 15 (w) | — | 2 × D-Sub 15 (w) | — | — | |
| Empfohlene Controller/Treiber | G-901.R319 G-902.R2E001 C-663.12, C-885 mit C-663.12C885 Modularer ACS-Controller | G-901.R319 G-902.R2E001 Modularer ACS-Controller | G-901.R319 G-902.R2E001 C-663.12, C-885 mit C-663.12C885 Modularer ACS-Controller | G-901.R319 G-902.R2E001 Modularer ACS-Controller | G-901.R319 G-902.R2E001 C-863.12, C-885 mit C-863.20C885 Modularer ACS-Controller | G-901.R319 G-902.R2E001 C-863.12, C-885 mit C-863.20C885 Modularer ACS-Controller |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
L-741 / V-741 Präzisions-Kreuztisch
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Präzisions-Kreuztisch; 2-Phasen-Schrittmotor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 45 mm/s × 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel
Präzisions-Kreuztisch; 2-Phasen-Schrittmotor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 45 mm/s × 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Kreuztisch; 2-Phasen-Schrittmotor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 45 mm/s × 45 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 10 nm Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Kreuztisch; DC-Motor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 50 mm/s × 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Präzisions-Kreuztisch; DC-Motor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 50 mm/s × 50 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 10 nm Sensorauflösung, A/B-Quadratur, RS-422
Präzisions-Kreuztisch; DC-Motor; 305 mm × 305 mm Stellweg (X × Y); 200 N Belastbarkeit; 90 mm/s × 90 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 20000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Positionierer mit Stellwegen von mehreren Millimetern bis über einem Meter verwenden in der Regel mechanische Führungskomponenten wie Kugellager.

Bei längeren Stellwegen ab ca. 1 Millimeter stoßen die kapazitiven Messsysteme an ihre Grenzen: PI verwendet daher inkrementelle Messsysteme.

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.

Die drehenden Elektromotoren, wie zum Beispiel DC- oder Schrittmotoren, werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt.

Ob Medizin, Forensik, Vererbung - für zahlreiche Fragen liefert das Genom den Schlüssel zu neuer Erkenntnis. Die als „sequencing-by-synthesis“ bekannte Methode zur Entschlüsselung des Genoms ist seit ihrer Entwicklung erheblich schneller und präziser geworden - entsprechend sind die Kosten gesunken. Dazu haben auch die Positioniertechniken in den eingesetzten Mikroskopsystemen beigetragen.

Die moderne Medizintechnik strebt danach, Patienten durch Therapien möglichst wenig zu belasten. Endoskope, die minimal invasive Eingriffe ermöglichen, leisten dazu einen wichtigen Beitrag, beispielsweise bei der Laparoskopie. Gerade bei medizinischen Eingriffen steht die Forderung nach scharfen und detailreichen Bildinformationen an oberster Stelle, um bestmögliche Erfolgsaussichten zu erlangen.

In der Strahlentherapie werden einzelne Lamellenblenden so verstellt, dass das gesunde Gewebe bestmöglich vor der Strahlung geschützt wird.

Schnelle Piezoscanner arbeiten mit den notwendigen Verstellgeschwindigkeiten um in der Bildstabilisierung und im Microscanning eingesetzt zu werden.
In der refraktiven Chirurgie sind präzise Positionierung und Bewegungskontrolle des Lasers entscheidend für gute Ergebnisse. Piezogetriebene Achsen und Kippspiegelsysteme bieten diese Präzision, sind dynamisch und schnell und helfen so zusätzlich, die Behandlungszeit zu verkürzen.

Piezomotoren sind für das Pipettieren bei immer kleineren Geräteabmessungen und Probenabständen geeignet und können Pipetten auch vertikal bewegen.
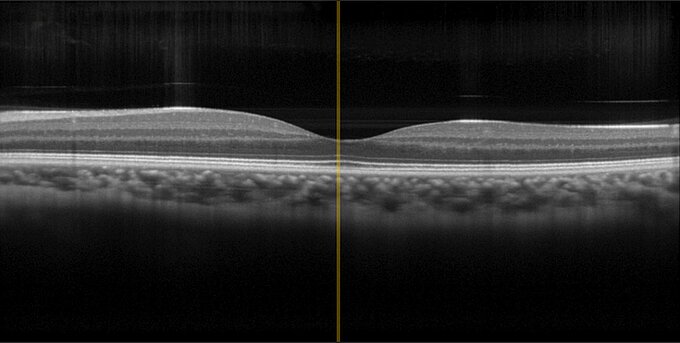
Piezoaktoren und -antriebe garantieren die für die optische Kohärenztomographie notwendige hohe Präzision und Positionsstabilität.
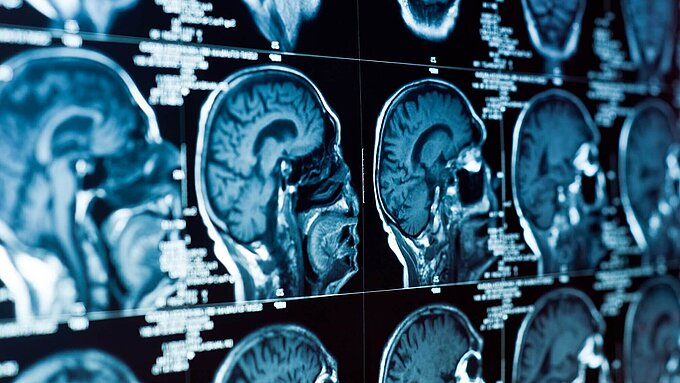
Piezoantriebe sind für die Magnetresonanztherapie geeignet, da sie sich von starken Magnetfeldern nicht in ihrer Funktion beeinträchtigen lassen.



















