A-110.050A1
PIglide LC Lineartisch, Luftlager, 50 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
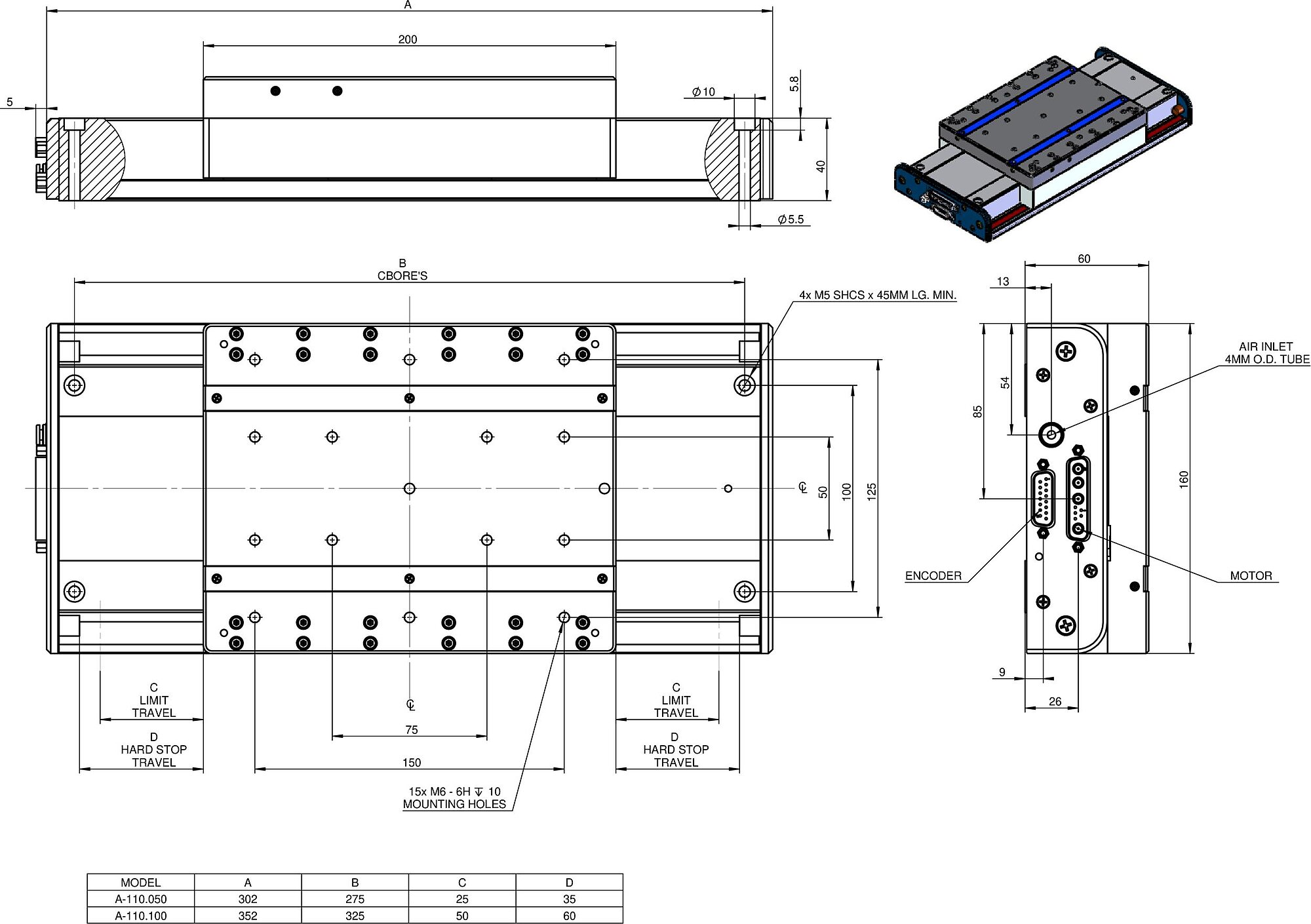
A-110.050, A-110.100, Abmessungen in mm
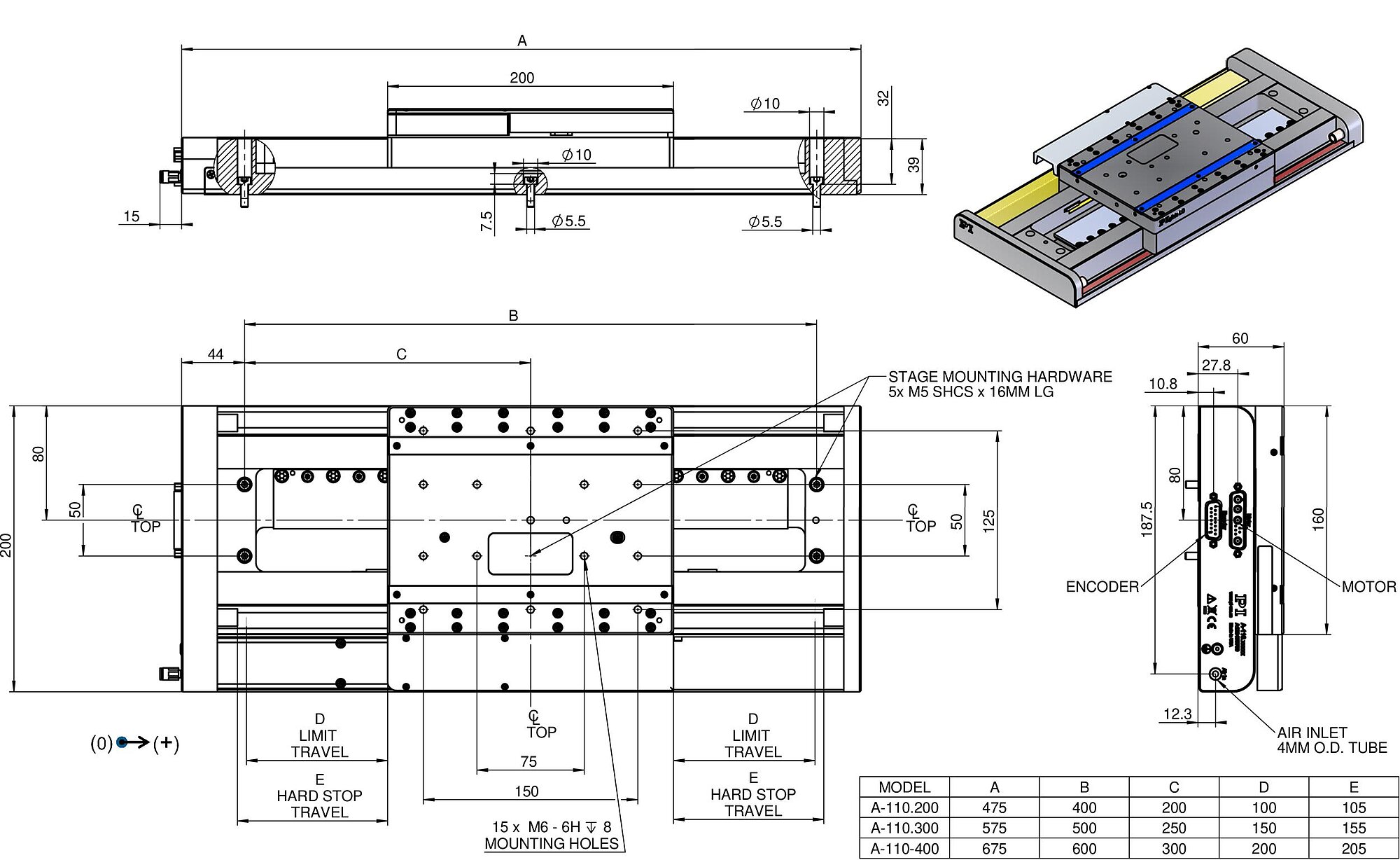
A-110.200, A-110.300, A-110.400, Abmessungen in mm



Produktübersicht
PIglide Positioniersysteme besitzen einen magnetischen Linearmotor, magnetisch vorgespannte Luftlager und optische Linearencoder: Kontakt- und Reibungsfreie Bewegung für höchste Genauigkeit und Zuverlässigkeit.
Zubehör und Optionen
Einsatzgebiete
PIglide Positioniersysteme sind ideal geeignet für hochpräzise Anwendungen in der Messtechnik, Photonik und Präzisionsscannen in der Halbleiter- oder der Flachbildschirm-Herstellung.
Aufgrund der Reibungsfreiheit entstehen keine Partikel, wodurch PIglide Tische ideal unter Reinraumbedingungen eingesetzt werden können.
| Bewegen | A-110.050A1 | A-110.050B1 | A-110.100A1 | A-110.100B1 | A-110.200A1 | A-110.200B1 | A-110.300A1 | A-110.300B1 | A-110.400A1 | A-110.400B1 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 50 mm | 50 mm | 100 mm | 100 mm | 200 mm | 200 mm | 300 mm | 300 mm | 400 mm | 400 mm | |
| Beschleunigung in X, unbelastet | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | 20 m/s² | max. |
| Maximale Geschwindigkeit in X, unbelastet | 500 mm/s | 500 mm/s | 500 mm/s | 500 mm/s | 1000 mm/s | 1000 mm/s | 1000 mm/s | 1000 mm/s | 1000 mm/s | 1000 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,75 µm | ± 0,75 µm | ± 1 µm | ± 1 µm | ± 1 µm | ± 1 µm | max. |
| Geradheitsabweichung in Z (Ebenheit) | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,75 µm | ± 0,75 µm | ± 1 µm | ± 1 µm | ± 1 µm | ± 1 µm | max. |
| Winkelabweichung um Y (Nicken) | ± 7,5 µrad | ± 7,5 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 17,5 µrad | ± 17,5 µrad | ± 20 µrad | ± 20 µrad | max. |
| Winkelabweichung um Z (Gieren) | ± 7,5 µrad | ± 7,5 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | ± 17,5 µrad | ± 17,5 µrad | ± 20 µrad | ± 20 µrad | max. |
| Positionieren | A-110.050A1 | A-110.050B1 | A-110.100A1 | A-110.100B1 | A-110.200A1 | A-110.200B1 | A-110.300A1 | A-110.300B1 | A-110.400A1 | A-110.400B1 | Toleranz |
| Positioniergenauigkeit in X, kalibriert | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | ± 0,5 µm | typ. |
| Positioniergenauigkeit in X, unkalibriert | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 1,5 µm | ± 2 µm | ± 1,5 µm | ± 3 µm | ± 1,5 µm | ± 4 µm | ± 1,5 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | typ. |
| Referenzschalter | Encoder-Index | — | Encoder-Index | — | Encoder-Index | — | Encoder-Index | — | Encoder-Index | — | |
| Endschalter | Hall-Effekt | — | Hall-Effekt | — | Hall-Effekt | — | Hall-Effekt | — | Hall-Effekt | — | |
| Integrierter Sensor | Inkrementeller Linearencoder | Absoluter Linearencoder | Inkrementeller Linearencoder | Absoluter Linearencoder | Inkrementeller Linearencoder | Absoluter Linearencoder | Inkrementeller Linearencoder | Absoluter Linearencoder | Inkrementeller Linearencoder | Absoluter Linearencoder | |
| Sensorsignal | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | |
| Sensorsignalperiode | 20 µm | — | 20 µm | — | 20 µm | — | 20 µm | — | 20 µm | — | |
| Sensorauflösung | 4,88 nm | 1 nm | 4,88 nm | 1 nm | 4,88 nm | 1 nm | 4,88 nm | 1 nm | 4,88 nm | 1 nm | |
| Antriebseigenschaften | A-110.050A1 | A-110.050B1 | A-110.100A1 | A-110.100B1 | A-110.200A1 | A-110.200B1 | A-110.300A1 | A-110.300B1 | A-110.400A1 | A-110.400B1 | Toleranz |
| Antriebstyp | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | |
| Nennspannung | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | |
| Spitzenspannung | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | 60 V | |
| Nennstrom, effektiv | 1,6 A | 1,6 A | 1,6 A | 1,6 A | 3,2 A | 3,2 A | 3,2 A | 3,2 A | 3,2 A | 3,2 A | typ. |
| Spitzenstrom, effektiv | 4,2 A | 4,2 A | 4,2 A | 4,2 A | 6,9 A | 6,9 A | 6,9 A | 6,9 A | 6,9 A | 6,9 A | typ. |
| Antriebskraft in positiver Bewegungsrichtung in X | 20 N | 20 N | 20 N | 20 N | 39 N | 39 N | 39 N | 39 N | 39 N | 39 N | typ. |
| Antriebskraft in negativer Bewegungsrichtung in X | 20 N | 20 N | 20 N | 20 N | 39 N | 39 N | 39 N | 39 N | 39 N | 39 N | typ. |
| Spitzenkraft in positiver Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 85 N | 85 N | 85 N | 85 N | 85 N | 85 N | |
| Spitzenkraft in negativer Bewegungsrichtung in X | 60 N | 60 N | 60 N | 60 N | 85 N | 85 N | 85 N | 85 N | 85 N | 85 N | |
| Kraftkonstante | 4,1 N/A | 4,1 N/A | 4,1 N/A | 4,1 N/A | 12,3 N/A | 12,3 N/A | 12,3 N/A | 12,3 N/A | 12,3 N/A | 12,3 N/A | |
| Widerstand Phase-Phase | 11 Ω | 11 Ω | 11 Ω | 11 Ω | 3,6 Ω | 3,6 Ω | 3,6 Ω | 3,6 Ω | 3,6 Ω | 3,6 Ω | typ. |
| Induktivität Phase-Phase | 6 mH | 6 mH | 6 mH | 6 mH | 1,24 mH | 1,24 mH | 1,24 mH | 1,24 mH | 1,24 mH | 1,24 mH | |
| Gegen-EMK Phase-Phase | 10 V·s/m | 10 V·s/m | 10 V·s/m | 10 V·s/m | 10,1 V·s/m | 10,1 V·s/m | 10,1 V·s/m | 10,1 V·s/m | 10,1 V·s/m | 10,1 V·s/m | max. |
| Polteilung N-N | 33,6 mm | 33,6 mm | 33,6 mm | 33,6 mm | 24 mm | 24 mm | 24 mm | 24 mm | 24 mm | 24 mm | |
| Mechanische Eigenschaften | A-110.050A1 | A-110.050B1 | A-110.100A1 | A-110.100B1 | A-110.200A1 | A-110.200B1 | A-110.300A1 | A-110.300B1 | A-110.400A1 | A-110.400B1 | Toleranz |
| Zulässige Druckkraft in Z | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| Bewegte Masse in X, unbelastet | 2500 g | 2500 g | 2500 g | 2500 g | 2600 g | 2600 g | 2600 g | 2600 g | 2600 g | 2600 g | |
| Führung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | |
| Gesamtmasse | 6300 g | 6300 g | 7500 g | 7500 g | 11000 g | 11000 g | 12000 g | 12000 g | 14000 g | 14000 g | |
| Material | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | |
| Anschlüsse und Umgebung | A-110.050A1 | A-110.050B1 | A-110.100A1 | A-110.100B1 | A-110.200A1 | A-110.200B1 | A-110.300A1 | A-110.300B1 | A-110.400A1 | A-110.400B1 | Toleranz |
| Betriebstemperaturbereich | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | |
| Anschluss | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | |
| Sensoranschluss | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | |
| Betriebsdruck | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | |
| Luftdurchsatz | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | 28 L/min | max. |
| Luftqualität | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | |
| Empfohlene Controller/Treiber | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
A-110 PIglide LC Linearversteller mit Luftlager
Nicht alle Positioniertische sind gleich aufgebaut. Autor: Matt Reck, PI
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
PIglide LC Lineartisch, Luftlager, 50 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 50 mm Stellweg, absoluter Linearencoder mit BiSS-C-Signalübertragung, 1 nm Sensorauflösung, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 100 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 100 mm Stellweg, absoluter Linearencoder mit BiSS-C-Signalübertragung, 1 nm Sensorauflösung, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 200 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 200 mm Stellweg, absoluter Linearencoder mit BiSS-C-Signalübertragung, 1 nm Sensorauflösung, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 300 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 300 mm Stellweg, absoluter Linearencoder mit BiSS-C-Signalübertragung, 1 nm Sensorauflösung, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 400 mm Stellweg, inkrementeller Linearencoder mit sin/cos-Signalübertragung, 20 µm Sensorsignalperiode, eisenloser 3-Phasen-Linearmotor, 48 V
PIglide LC Lineartisch, Luftlager, 400 mm Stellweg, absoluter Linearencoder mit BiSS-C-Signalübertragung, 1 nm Sensorauflösung, eisenloser 3-Phasen-Linearmotor, 48 V
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Der Magnetantrieb kann eine luftgelagerte bewegte Plattform innerhalb weniger Nanometer linear oder weniger Bogensekunden rotatorisch positionieren.

Magnetische Direktantriebe bieten vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen.


















