A-322 Base
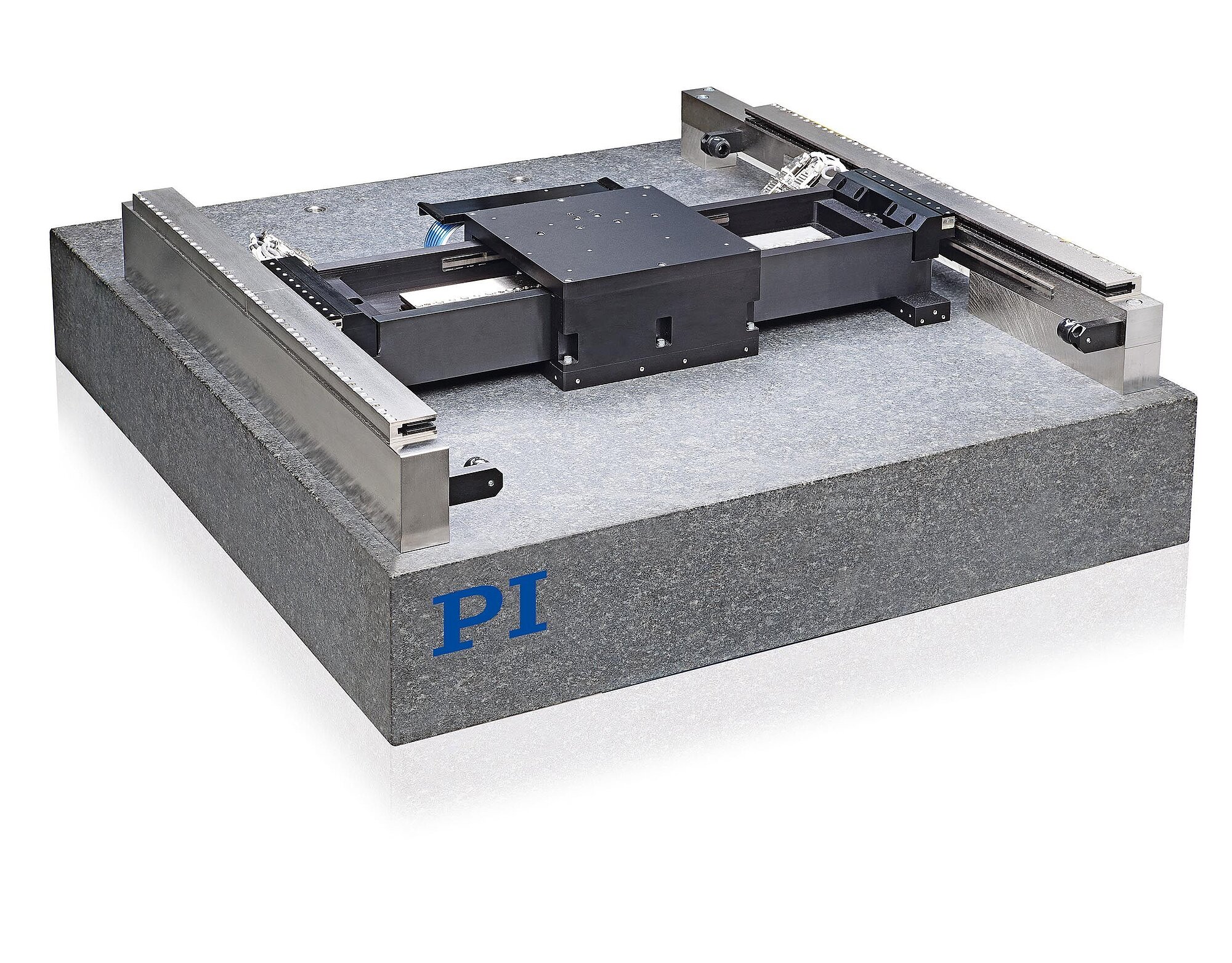
PIglide HS Planarscanner, Luftlager, 3-Phasen-Linearmotoren, Absolute Linearencoder, Stellweg bis zu 500 mm × 500 mm (bitte in der Anfrageliste spezifizieren)
A-322 Base

Der PIglide HS Planarscanner besitzt magnetische Linearmotoren, Vakuumvorspannung und Absolutencoder: kontakt- und reibungsfreie Bewegung für höchste Genauigkeit und Zuverlässigkeit
Das Positioniersystem wurde ausgelegt, um sowohl die Durchsatzrate zu maximieren als auch höchste Präzision zu gewährleisten. Die flexible Ankopplung der Brückenachse zur Portalachse ermöglicht eine laterale Entkopplung, ohne auf die Gesamtsteifigkeit des Systems zu verzichten.
Das A-322 ist mit branchenführenden Controllern und Antriebsreglern von ACS gekoppelt, die eine hervorragende Servoleistung, fortschrittliche Regelalgorithmen zur Verbesserung der dynamischen Leistung und Fehlerkompensation sowie eine breite Palette von Softwareentwicklungswerkzeugen bieten.
Die A-322-Serie ist ein Ausgangspunkt für Anpassungen. Kritische Kernkomponenten wie Linearmotoren, Messsysteme und Luftlager-Baugruppen wurden bereits entwickelt, getestet und haben ihre Fähigkeiten unter Beweis gestellt. Je nach Anwendung und Anforderungen des Kunden bildet eine Variante der A-322-Serie den idealen Ausgangspunkt für eine maßgeschneiderte ultrapräzise Lösung.
Absolutencoder liefern eindeutige Lageinformationen, die eine sofortige Feststellung der Position ermöglichen. Somit ist keine Referenzierung beim Einschalten erforderlich, Effizienz und Sicherheit im Betrieb können gesteigert werden.
3-phasige magnetische Direktantriebe verzichten auf mechanische Bauteile im Antriebsstrang, sie übertragen die Antriebskraft direkt und reibungsfrei auf die Bewegungsplattform. Die Antriebe erreichen hohe Geschwindigkeiten und Beschleunigungen. Eisenlose Motoren eignen sich besonders für Positionieraufgaben mit höchsten Ansprüchen an Präzision, da es keine unerwünschten Wechselwirkungen mit den Permanentmagneten gibt. Dies ermöglicht einen gleichmäßigen Lauf auch bei niedrigsten Geschwindigkeiten, gleichzeitig treten keine Vibrationen bei hohen Geschwindigkeiten auf. Nichtlinearitäten im Regelverhalten werden vermieden und jede beliebige Position kann einfach geregelt werden. Die Antriebskraft ist frei einstellbar.
Der A-322 verfügt über hochwertige, langlebige Flachbandkabel und Pneumatikschläuche. Umfangreiche Forschungs- und Entwicklungsarbeiten haben zu einem optimierten Kabelmanagement-System geführt, das Millionen von wartungsfreien Zyklen ermöglicht. Eine Teflonummantelung sorgt für geringe Partikelbildung.
PIglide Positioniersysteme sind ideal geeignet für hochpräzise Anwendungen in der Messtechnik, Photonik und Präzisionsscannen in der Halbleiter- oder der Flachbildschirm-Herstellung.
Aufgrund der Reibungsfreiheit entstehen keine Partikel, wodurch PIglide Positionierer ideal unter Reinraumbedingungen eingesetzt werden können.
Modell | Einheit | A-322 Base | A-322 Plus | A-322 Ultra |
|---|---|---|---|---|
Präzision/Dynamik | Standard/Standard | Standard/Hoch | Hoch/Hoch | |
Bewegen | ||||
Stellweg Brückenachse | mm | 350; 500 | 350; 500 | 350; 500 |
Stellweg Portalachse | mm | 350; 500 | 350; 500; 750 | 350; 500; 750; 1000 |
Größe der Bewegungsplattform | 250 × 268 | 250 × 268 | 250 × 318 | |
Führung | Luftlager, mit Vakuum-Vorspannung | Luftlager, mit Vakuum-Vorspannung | Luftlager, mit Vakuum-Vorspannung | |
Integrierter Sensor | Absoluter Linearencoder, BiSS-C, Stahl-Maßverkörperung | Absoluter Linearencoder, BiSS-C, Stahl-Maßverkörperung | Absoluter Linearencoder, BiSS-C, Stahl-Maßverkörperung | |
Sensorauflösung | nm | 1 | 1 | 1 |
Belastbarkeit | kg | 15 | 20 | 30 |
Bidirektionale Wiederholbarkeit (2) | µm | ±0,15 | ±0,15 | ±0,05 |
Positioniergenauigkeit, kalibriert (2) | µm | ±0,35 | ±0,35 | ±0,2 |
Geradheit (2) | µm | 1 | 1 | 0,5 |
Ebenheit | µm | 2 | 2 | 2 |
Neigen | µrad | 10 | 10 | 10 |
Gieren (2) | µrad | 5 | 5 | 2 |
XY-Orthogonalität | µrad | 5 | 5 | 2 |
Max. Geschwindigkeit, unbelastet (3) | m/s | 0,5 | 1 | 1 |
Max. Beschleunigung, unbelastet (3) | m/s² | 10 | 20 | 20/15 (Brücken-/Portalachse) |
Positionsstabilität | nm | ±30 | ±30 | ±30 |
Bewegte Masse, Brückenachse | kg | 14 | 14 | 20 |
Bewegte Masse, Portalachse | kg | abhängig vom Stellweg der Brückenachse: 350 mm: 40 kg 500 mm: 44 kg | abhängig vom Stellweg der Brückenachse: 350 mm: 53 kg 500 mm: 56 kg | abhängig vom Stellweg der Brückenachse: 350 mm: 70 kg 500 mm: 75 kg |
Antriebseigenschaften (pro Motor) | Einheit | A-322 Base Brücken-/Portalachse | A-322 Plus Brücken-/Portalachse | A-322 Ultra Brücken-/Portalachse |
|---|---|---|---|---|
Anzahl Motoren | 1× Brücken-, 2× Portalachse | 1× Brücken-, 2× Portalachse | 2× Brücken-, 2× Portalachse | |
Nennspannung, DC | V | 70/70 | 70/70 | 70/70 |
Spitzenspannung, DC | V | 300/300 | 300/300 | 300/300 |
Nennkraft | N | 87/87 | 140/140 | 87/140 |
Spitzenkraft | N | 300/300 | 480/480 | 300/480 |
Kraftkonstante, effektiv | N/A | 19,9/19,9 | 27,5/27,5 | 19,9/27,5 |
Nennstrom, effektiv | A | 4,4/4,4 | 5,1/5,1 | 4,4/5,1 |
Spitzenstrom, effektiv | A | 15/15 | 17,5/17,5 | 15/17,5 |
Gegen-EMK, Phase-Phase | V·s/m | 16/16 | 22,5/22,5 | 16/22,5 |
Widerstand, Phase-Phase | Ω | 3,6/3,6 | 2,6/2,6 | 3,6/2,6 |
Induktivität, Phase-Phase | mH | 1,2/1,2 | 2,0/2,0 | 1,2/2,0 |
Kühlsystem | – | Wasser, 20°C, 2 bis 3 l/min | Wasser, 20°C, 2 bis 3 l/min |
Sonstiges | alle A-322 |
|---|---|
Betriebsdruck | 550 ±35 kPa (80 ±5 psi) |
Luftdurchsatz | Mit externer Vakuum-Versorgung: 56 l/min (2 SCFM) Mit intern generiertem Vakuum: 112 l/min (4 SCFM) |
Vakuum | 74,66 kPa (560 mmHg), 14 l/min (0,5 SCFM) |
Luftqualität | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573‑1 Klasse 1 Ölfrei - ISO 8573‑1 Klasse 1 Trocken (-15 °C Taupunkt) - ISO 8573‑1 Klasse 3 |
Materialien | Granitbasis Hartbeschichtetes Aluminium Vernickelte Stahl-Seitenschienen Befestigungsmaterial aus Edelstahl |
Empfohlene Controller | A-81x, A-82x |
Nicht alle Positioniertische sind gleich aufgebaut. Autor: Matt Reck, PI
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.















