A-634.A100
PIglide RL Rotationstisch, Luftlager, 150 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, Winkelmesssystem mit sin/cos-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
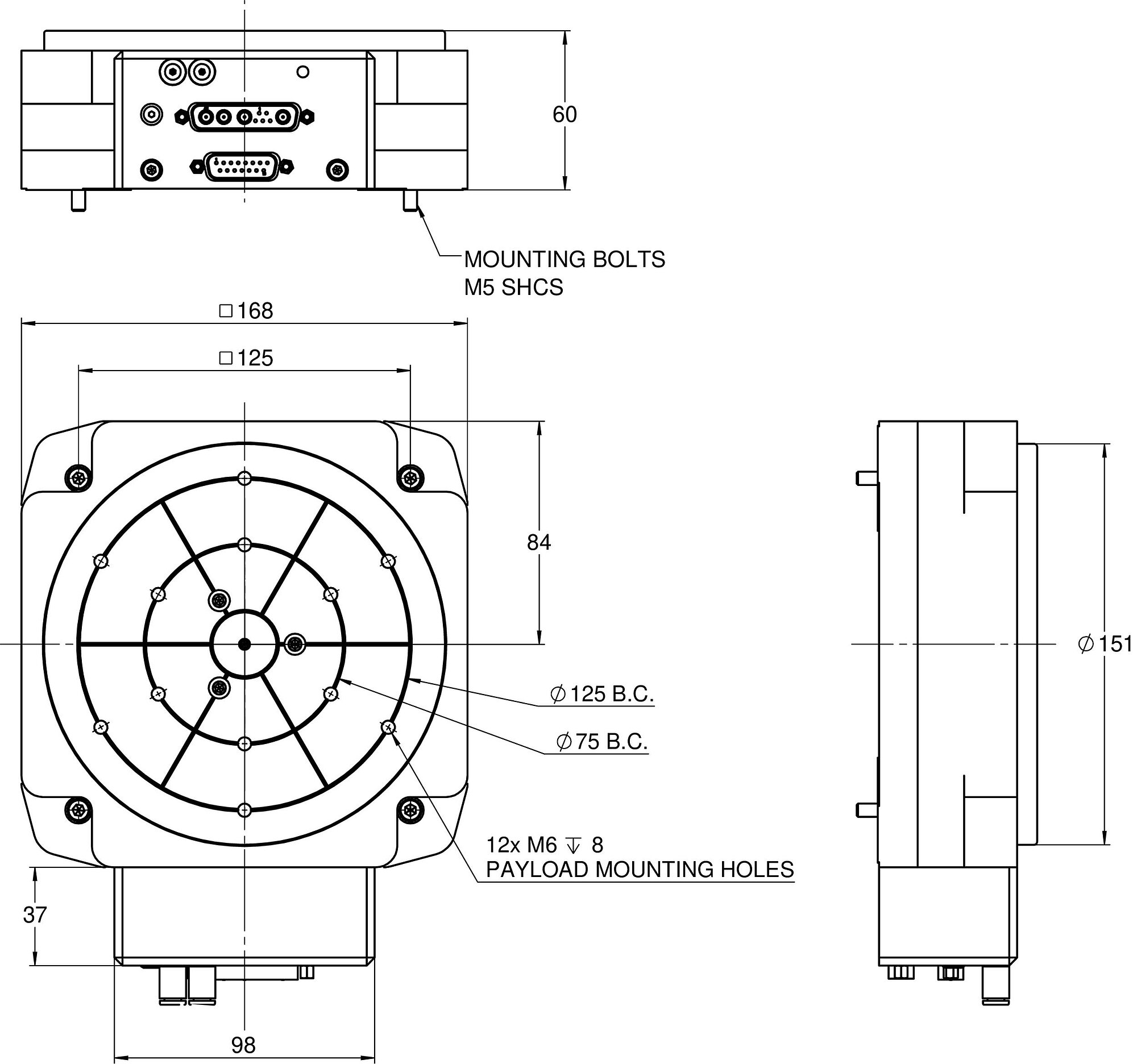
A-634, Abmessungen in mm
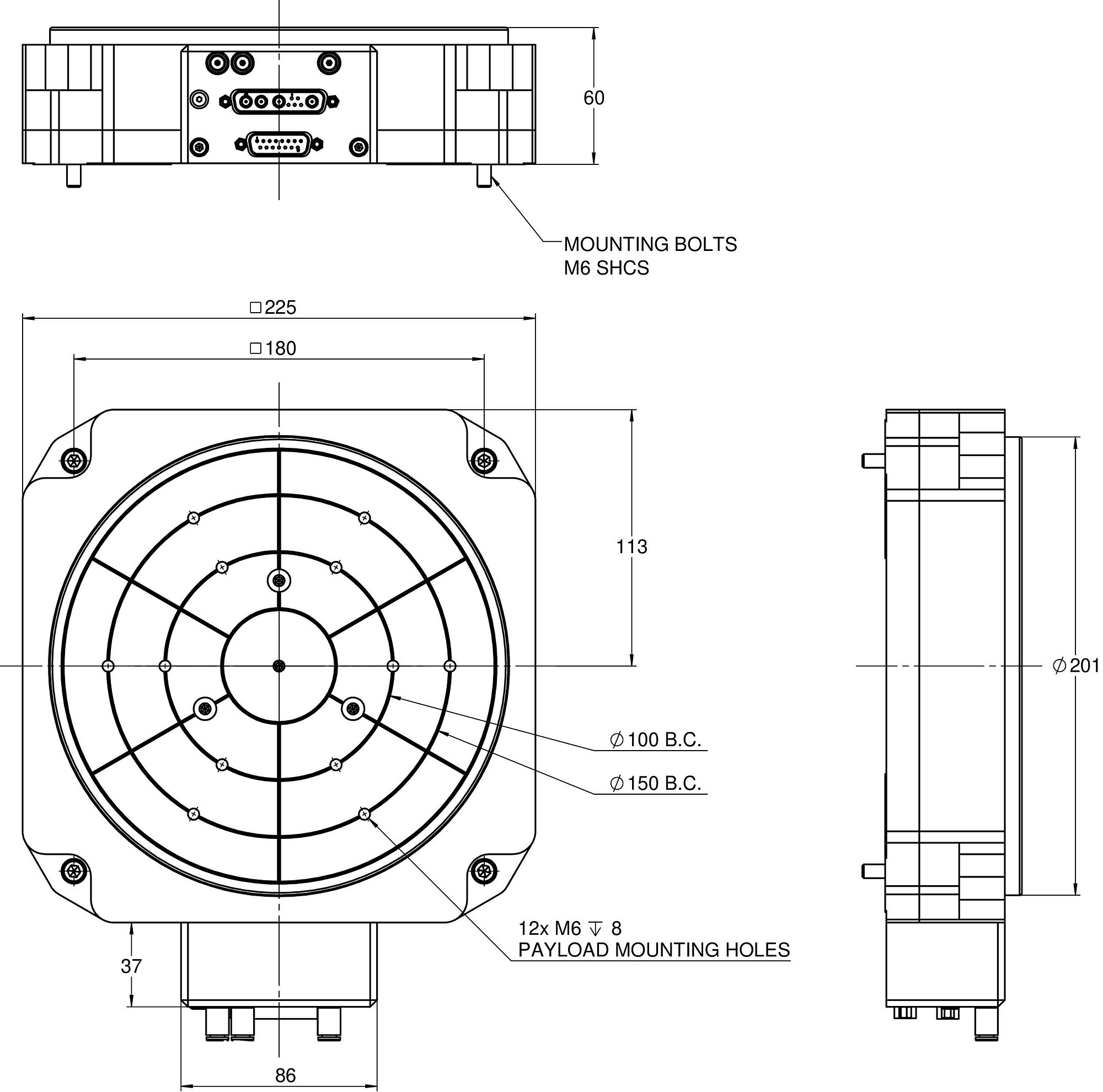
A-635, Abmessungen in mm
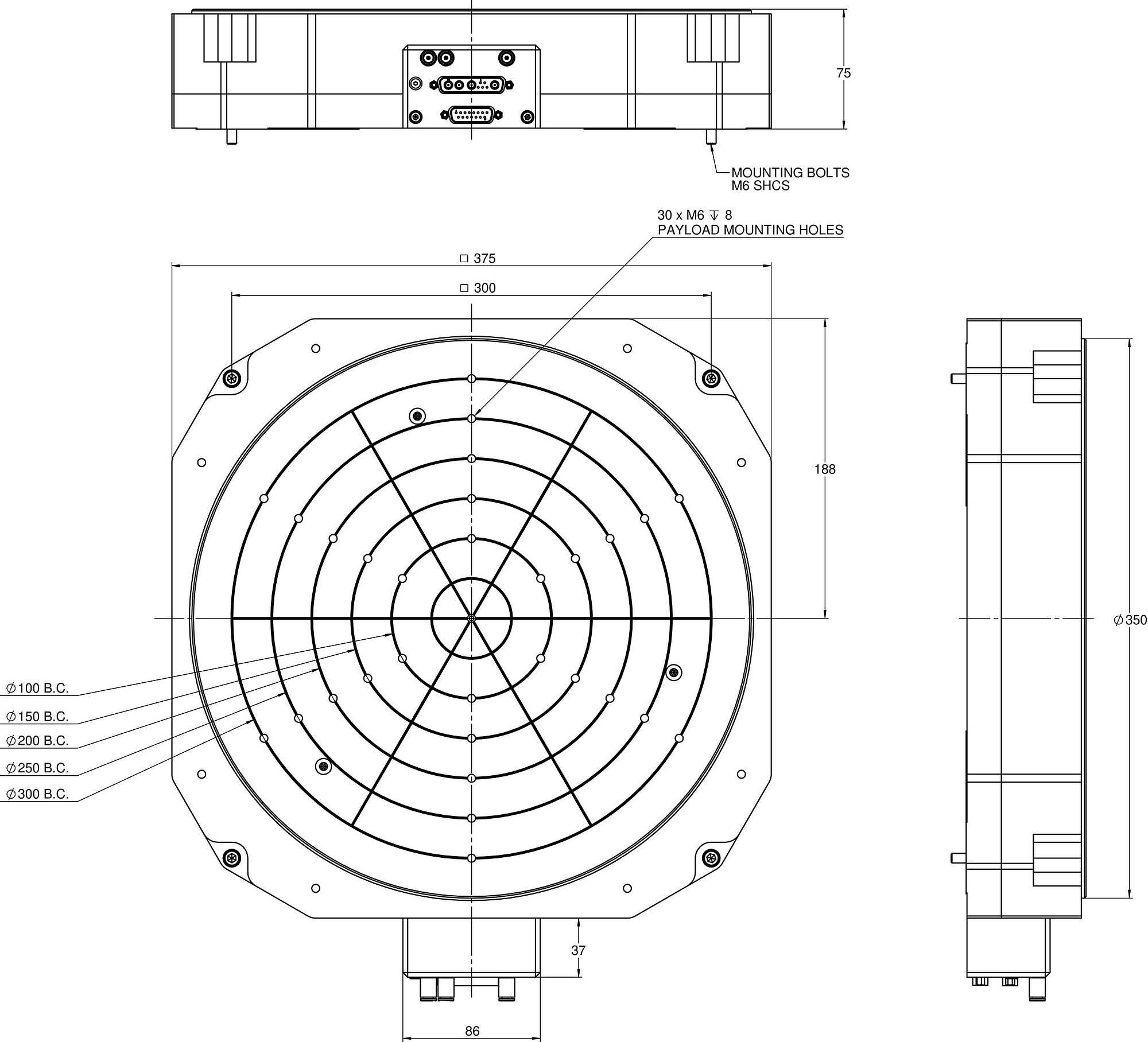
A-638, Abmessungen in mm




Produktübersicht
Die direktangetriebenen Rotationstische der PIglide RL-Serie sind für höchste Präzision ausgelegt und haben eine flache Bauform. Verschiedene Optionen können zu einer Lösung kombiniert werden, die ideal für Punkt-zu-Punkt Indizierung oder Scannen mit konstanter Geschwindigkeit ist. Die RL-Tische bieten eine überragende Leistung bei Ablaufgenauigkeit, Ebenheit und Taumeln.
3-Phasen-Torquemotor
Absolutencoder (optional)
Absolutencoder liefern eindeutige Lageinformationen, die eine sofortige Feststellung der Position ermöglichen. Somit ist keine Referenzierung beim Einschalten erforderlich, Effizienz und Sicherheit im Betrieb können gesteigert werden.
Zubehör und Optionen
Inkrementeller oder absoluter Encoder
Vakuumdurchführung
Selbsthemmung im Stillstand durch magnetische Vorspannung
Freie Apertur auf Anforderung
PIglide Filter und Druckregler
Ein- oder mehrachsige Motion Controller und Servoantriebe
Mehrachs-/ kundenspezifische Aufbauten
Grundplatten aus Granit und Systeme zur Vibrationsminderung
Einsatzgebiete
Optische Justage, Waferinspektion, Waferjustage, Messtechnik, Inspektionssysteme, Kalibrierung, Scannen.
Aufgrund der Reibungsfreiheit entstehen keine Partikel, wodurch PIglide Tische ideal unter Reinraumbedingungen eingesetzt werden können.
| Bewegen | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Toleranz |
|---|---|---|---|---|---|---|---|
| Aktive Achsen | θZ | θZ | θZ | θZ | θZ | θZ | |
| Rotationsbereich in θZ | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | 360 ° | |
| Maximale Winkelgeschwindigkeit in θZ, unbelastet | 500 min⁻¹ | 500 min⁻¹ | 500 min⁻¹ | 500 min⁻¹ | 500 min⁻¹ | 500 min⁻¹ | |
| Radiale Abweichung in X | ± 0,1 µm | ± 0,1 µm | ± 0,075 µm | ± 0,075 µm | ± 0,05 µm | ± 0,05 µm | max. |
| Axiale Abweichung | ± 0,038 µm | ± 0,038 µm | ± 0,038 µm | ± 0,038 µm | ± 0,025 µm | ± 0,025 µm | max. |
| Verkippung um X (Wobble) | ± 1 µrad | ± 1 µrad | ± 1 µrad | ± 1 µrad | ± 0,5 µrad | ± 0,5 µrad | max. |
| Positionieren | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Toleranz |
| Positioniergenauigkeit in θZ, kalibriert | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | ± 8 µrad | typ. |
| Bidirektionale Wiederholgenauigkeit in θZ | 4 µrad | 4 µrad | 4 µrad | 4 µrad | 4 µrad | 4 µrad | typ. |
| Referenzschalter | 1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze | — | 1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze | — | 1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze | — | |
| Integrierter Sensor | Inkrementelles Winkelmesssystem | Absolutes Winkelmesssystem | Inkrementelles Winkelmesssystem | Absolutes Winkelmesssystem | Inkrementelles Winkelmesssystem | Absolutes Winkelmesssystem | |
| Sensorsignal | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | BiSS-C | |
| Sensorsignalperioden/U | 23600 | — | 31488 | — | 31488 | — | |
| Sensorauflösung, rotatorisch | 0,06 µrad | 0,0015 µrad | 0,05 µrad | 0,0015 µrad | 0,05 µrad | 0,0015 µrad | |
| Antriebseigenschaften | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Toleranz |
| Antriebstyp | Eisenloser 3-Phasen-Torquemotor | Eisenloser 3-Phasen-Torquemotor | Eisenloser 3-Phasen-Torquemotor | Eisenloser 3-Phasen-Torquemotor | Eisenloser 3-Phasen-Torquemotor | Eisenloser 3-Phasen-Torquemotor | |
| Nennspannung | 48 V | 48 V | 48 V | 48 V | 48 V | 48 V | |
| Spitzenspannung | 80 V | 80 V | 80 V | 80 V | 80 V | 80 V | |
| Nennstrom, effektiv | 2,3 A | 2,3 A | 4,5 A | 4,5 A | 4,5 A | 4,5 A | typ. |
| Spitzenstrom, effektiv | 6,9 A | 6,9 A | 13,9 A | 13,9 A | 13,9 A | 13,9 A | typ. |
| Antriebsmoment in Uhrzeigerrichtung in θZ | 1,6 N·m | 1,6 N·m | 2,8 N·m | 2,8 N·m | 2,8 N·m | 2,8 N·m | max. |
| Antriebsmoment gegen die Uhrzeigerrichtung in θZ | 1,6 N·m | 1,6 N·m | 2,8 N·m | 2,8 N·m | 2,8 N·m | 2,8 N·m | max. |
| Spitzenmoment in Uhrzeigerrichtung in θZ | 4,7 N·m | 4,7 N·m | 8,5 N·m | 8,5 N·m | 8,5 N·m | 8,5 N·m | max. |
| Spitzenmoment gegen die Uhrzeigerrichtung in θZ | 4,7 N·m | 4,7 N·m | 8,5 N·m | 8,5 N·m | 8,5 N·m | 8,5 N·m | max. |
| Drehmomentkonstante | 0,59 N·m/A | 0,59 N·m/A | 0,66 N·m/A | 0,66 N·m/A | 0,66 N·m/A | 0,66 N·m/A | typ. |
| Widerstand Phase-Phase | 6,7 Ω | 6,7 Ω | 4,5 Ω | 4,5 Ω | 4,5 Ω | 4,5 Ω | typ. |
| Induktivität Phase-Phase | 0,9 mH | 0,9 mH | 0,6 mH | 0,6 mH | 0,6 mH | 0,6 mH | |
| Gegen-EMK Phase-Phase, rotatorisch | 71 V/kRPM | 71 V/kRPM | 80 V/kRPM | 80 V/kRPM | 80 V/kRPM | 80 V/kRPM | max. |
| Mechanische Eigenschaften | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Toleranz |
| Zulässige Druckkraft in X | 40 N | 40 N | 80 N | 80 N | 200 N | 200 N | max. |
| Zulässige Druckkraft in Y | 40 N | 40 N | 80 N | 80 N | 200 N | 200 N | max. |
| Zulässige Druckkraft in Z | 190 N | 190 N | 320 N | 320 N | 1200 N | 1200 N | max. |
| Zulässiges Moment in θX | 4,5 N·m | 4,5 N·m | 12 N·m | 12 N·m | 130 N·m | 130 N·m | max. |
| Zulässiges Moment in θY | 4,5 N·m | 4,5 N·m | 12 N·m | 12 N·m | 130 N·m | 130 N·m | max. |
| Trägheitsmoment in θZ, unbelastet | 6710 kg·mm² | 6710 kg·mm² | 21580 kg·mm² | 21580 kg·mm² | 147090 kg·mm² | 147090 kg·mm² | ±20 % |
| Bewegte Masse in θZ, unbelastet | 1900 g | 1900 g | 3600 g | 3600 g | 11000 g | 11000 g | ±5 % |
| Lagertyp | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | Luftlager mit magnetischer Vorspannung | |
| Gesamtmasse | 4600 g | 4600 g | 7500 g | 7500 g | 24000 g | 24000 g | ±5 % |
| Material | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | |
| Anschlüsse und Umgebung | A-634.A100 | A-634.B100 | A-635.A100 | A-635.B100 | A-638.A100 | A-638.B100 | Toleranz |
| Betriebstemperaturbereich | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | 15 bis 25 °C | |
| Anschluss | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | D-Sub 9W4 (m) | |
| Sensoranschluss | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | |
| Betriebsdruck | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | 515 bis 585 kPa | |
| Luftdurchsatz | 56 L/min | 56 L/min | 56 L/min | 56 L/min | 56 L/min | 56 L/min | max. |
| Luftqualität | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3 | |
| Empfohlene Controller/Treiber | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) | A-81x (1, 2 oder 4 Achsen) A-82x (4, 6 oder 8 Achsen) |
Hinweis zu linearem und rotatorischem Übersprechen: Abhängig von der Qualität des Untergrundes, der Nutzlast, der Orientierung und Kräften, die von außen auf den Tisch wirken. Bitte kontaktieren Sie PI für applikationsspezifische Parameter. Angegebene Werte sind statisch (keine Rotationsbewegung während der Messung) und ohne Last.
Hinweis zu zulässiger Druckkraft und zulässigem Moment: Die aufgeführten Werte setzen eine Luftversorgung mit 550 kPa (80 psi) voraus. Für andere Drücke, wenden Sie sich bitte an PI.
Hinweis zu Winkelgeschwindigkeit: Kann durch Nutzlast, Nutzlastunwucht, Controller oder Antrieb eingeschränkt werden.
Hinweis zu Sensorauflösung bei A-63x.A100: Geht von einer 4096-fachen Interpolation aus. Kontaktieren Sie PI für den Einsatz anderer Faktoren.
Hinweis zu Positioniergenauigkeit: Mit Führungsfehlerkompensation. Angegebene Werte basieren auf Controller-gesteuerter Fehlerkompensation. Der Tisch muss mit einem Controller der Serie A-8xx von PI geordert werden, um diese Werte zu erreichen. Genauigkeitswerte gehen von kurzfristiger Dauer aus und berücksichtigen die Langzeitfolgen der thermischen Drift auf den Tisch nicht.
Hinweis zu Betriebsdruck: Zum Schutz des Tischs gegen Schäden wird empfohlen, einen Luftdrucksensor an den Motion-Stop-Eingang des Controllers anzuschließen.
Sonderausführungen auf Anfrage
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
A-63x Series Low Profile Rotary Air Bearing Stage PIglide RL, Direct-drive Torque Motor Driven with Encoder Feedback
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
PIglide RL Rotationstisch, Luftlager, 150 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, Winkelmesssystem mit sin/cos-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
PIglide RL Rotationstisch, Luftlager, 150 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, absolutes Winkelmesssystem mit BiSS-C-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
PIglide RL Rotationstisch, Luftlager, 200 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, Winkelmesssystem mit sin/cos-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
PIglide RL Rotationstisch, Luftlager, 200 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, absolutes Winkelmesssystem mit BiSS-C-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
PIglide RL Rotationstisch, Luftlager, 350 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, Winkelmesssystem mit sin/cos-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
PIglide RL Rotationstisch, Luftlager, 350 mm Durchmesser Bewegungsplattform, niedrige Bauhöhe, absolutes Winkelmesssystem mit BiSS-C-Signalübertragung, nutenloser bürstenloser 3-Phasen-Torquemotor
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Der Magnetantrieb kann eine luftgelagerte bewegte Plattform innerhalb weniger Nanometer linear oder weniger Bogensekunden rotatorisch positionieren.

Magnetische Direktantriebe bieten vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen.













