|
Aktive Achsen
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
θZ
|
|
|
Rotationsbereich in θZ
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
360 °
|
|
|
Maximale Winkelgeschwindigkeit in θZ, unbelastet
|
2500 min⁻¹
|
2500 min⁻¹
|
1200 min⁻¹
|
1200 min⁻¹
|
1200 min⁻¹
|
1200 min⁻¹
|
600 min⁻¹
|
600 min⁻¹
|
500 min⁻¹
|
500 min⁻¹
|
500 min⁻¹
|
500 min⁻¹
|
|
|
Radiale Abweichung in X
|
± 0,15 µm
|
± 0,15 µm
|
± 0,087 µm
|
± 0,087 µm
|
± 0,087 µm
|
± 0,087 µm
|
± 0,05 µm
|
± 0,05 µm
|
± 0,05 µm
|
± 0,05 µm
|
± 0,037 µm
|
± 0,037 µm
|
max.
|
|
Axiale Abweichung
|
± 0,05 µm
|
± 0,05 µm
|
± 0,037 µm
|
± 0,037 µm
|
± 0,037 µm
|
± 0,037 µm
|
± 0,025 µm
|
± 0,025 µm
|
± 0,025 µm
|
± 0,025 µm
|
± 0,02 µm
|
± 0,02 µm
|
max.
|
|
Verkippung um X (Wobble)
|
± 2,5 µrad
|
± 2,5 µrad
|
± 1,5 µrad
|
± 1,5 µrad
|
± 1,5 µrad
|
± 1,5 µrad
|
± 1 µrad
|
± 1 µrad
|
± 1 µrad
|
± 1 µrad
|
± 0,5 µrad
|
± 0,5 µrad
|
max.
|
|
Positionieren
|
A-621.025A1
|
A-621.025B1
|
A-623.025A1
|
A-623.025B1
|
A-623.050A1
|
A-623.050B1
|
A-624.050A1
|
A-624.050B1
|
A-625.065A1
|
A-625.065B1
|
A-627.075A1
|
A-627.075B1
|
Toleranz
|
|
Positioniergenauigkeit in θZ, kalibriert
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 8 µrad
|
± 4 µrad
|
± 8 µrad
|
± 4 µrad
|
± 8 µrad
|
typ.
|
|
Bidirektionale Wiederholgenauigkeit in θZ
|
8 µrad
|
8 µrad
|
8 µrad
|
8 µrad
|
8 µrad
|
8 µrad
|
8 µrad
|
8 µrad
|
3 µrad
|
8 µrad
|
3 µrad
|
8 µrad
|
typ.
|
|
Referenzschalter
|
1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze
|
—
|
1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze
|
—
|
1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze
|
—
|
1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze
|
—
|
1/Umdrehung, ein Impuls über einen Schritt des Encoders, synchronisiert auf Ausgangssignal
|
1/Umdrehung, ein Impuls über einen Schritt des Encoders, synchronisiert auf Ausgangssignal
|
1/Umdrehung, Differenzialpuls über eine Sensorsignalperiode, 1 V Spitze-Spitze
|
—
|
|
|
Integrierter Sensor
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
Inkrementelles Winkelmesssystem
|
Absolutes Winkelmesssystem
|
|
|
Sensorsignal
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
|
|
Sensorsignalperioden/U
|
8192
|
—
|
15744
|
—
|
15744
|
—
|
23600
|
—
|
31488
|
—
|
47200
|
—
|
|
|
Sensorauflösung
|
0,19 µrad
|
0,0015 µrad
|
0,1 µrad
|
0,0015 µrad
|
0,1 µrad
|
0,0015 µrad
|
0,06 µrad
|
0,0015 µrad
|
0,05 µrad
|
0,0015 µrad
|
0,03 µrad
|
0,0015 µrad
|
|
|
Antriebseigenschaften
|
A-621.025A1
|
A-621.025B1
|
A-623.025A1
|
A-623.025B1
|
A-623.050A1
|
A-623.050B1
|
A-624.050A1
|
A-624.050B1
|
A-625.065A1
|
A-625.065B1
|
A-627.075A1
|
A-627.075B1
|
Toleranz
|
|
Antriebstyp
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
Eisenloser 3-Phasen-Torquemotor
|
|
|
Nennspannung
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
|
|
Spitzenspannung
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
|
|
Nennstrom
|
3,3 A
|
3,3 A
|
3,1 A
|
3,1 A
|
3,1 A
|
3,1 A
|
2,3 A
|
2,3 A
|
2,3 A
|
2,3 A
|
4,5 A
|
4,5 A
|
typ.
|
|
Spitzenstrom
|
9,9 A
|
9,9 A
|
9,3 A
|
9,3 A
|
9,3 A
|
9,3 A
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
13,9 A
|
13,9 A
|
typ.
|
|
Antriebsmoment in Uhrzeigerrichtung in θZ
|
0,07 N·m
|
0,07 N·m
|
0,7 N·m
|
0,7 N·m
|
0,7 N·m
|
0,7 N·m
|
1,57 N·m
|
1,57 N·m
|
1,57 N·m
|
1,57 N·m
|
2,82 N·m
|
2,82 N·m
|
max.
|
|
Antriebsmoment gegen die Uhrzeigerrichtung in θZ
|
0,07 N·m
|
0,07 N·m
|
0,7 N·m
|
0,7 N·m
|
0,7 N·m
|
0,7 N·m
|
1,57 N·m
|
1,57 N·m
|
1,57 N·m
|
1,57 N·m
|
2,82 N·m
|
2,82 N·m
|
max.
|
|
Spitzenmoment in Uhrzeigerrichtung in θZ
|
0,21 N·m
|
0,21 N·m
|
2,1 N·m
|
2,1 N·m
|
2,1 N·m
|
2,1 N·m
|
4,71 N·m
|
4,71 N·m
|
4,71 N·m
|
4,71 N·m
|
8,46 N·m
|
8,46 N·m
|
max.
|
|
Spitzenmoment gegen die Uhrzeigerrichtung in θZ
|
0,21 N·m
|
0,21 N·m
|
2,1 N·m
|
2,1 N·m
|
2,1 N·m
|
2,1 N·m
|
4,71 N·m
|
4,71 N·m
|
4,71 N·m
|
4,71 N·m
|
8,46 N·m
|
8,46 N·m
|
max.
|
|
Drehmomentkonstante
|
0,03 N·m/A
|
0,03 N·m/A
|
0,26 N·m/A
|
0,26 N·m/A
|
0,26 N·m/A
|
0,26 N·m/A
|
0,59 N·m/A
|
0,59 N·m/A
|
0,59 N·m/A
|
0,59 N·m/A
|
0,61 N·m/A
|
0,61 N·m/A
|
typ.
|
|
Widerstand Phase-Phase
|
2,7 Ω
|
2,7 Ω
|
4,2 Ω
|
4,2 Ω
|
4,2 Ω
|
4,2 Ω
|
6,7 Ω
|
6,7 Ω
|
6,7 Ω
|
6,7 Ω
|
4,5 Ω
|
4,5 Ω
|
typ.
|
|
Induktivität Phase-Phase
|
0,1 mH
|
0,1 mH
|
0,4 mH
|
0,4 mH
|
0,4 mH
|
0,4 mH
|
0,9 mH
|
0,9 mH
|
0,9 mH
|
0,9 mH
|
0,6 mH
|
0,6 mH
|
|
|
Gegen-EMK Phase-Phase, rotatorisch
|
4,1 V/kRPM
|
4,1 V/kRPM
|
31,8 V/kRPM
|
31,8 V/kRPM
|
31,8 V/kRPM
|
31,8 V/kRPM
|
71 V/kRPM
|
71 V/kRPM
|
71 V/kRPM
|
71 V/kRPM
|
74 V/kRPM
|
74 V/kRPM
|
max.
|
|
Polpaarzahl
|
6
|
6
|
14
|
14
|
14
|
14
|
24
|
24
|
24
|
24
|
32
|
32
|
|
|
Mechanische Eigenschaften
|
A-621.025A1
|
A-621.025B1
|
A-623.025A1
|
A-623.025B1
|
A-623.050A1
|
A-623.050B1
|
A-624.050A1
|
A-624.050B1
|
A-625.065A1
|
A-625.065B1
|
A-627.075A1
|
A-627.075B1
|
Toleranz
|
|
Steifigkeit in X
|
8 N/µm
|
8 N/µm
|
18 N/µm
|
18 N/µm
|
35 N/µm
|
35 N/µm
|
64 N/µm
|
64 N/µm
|
110 N/µm
|
110 N/µm
|
204 N/µm
|
204 N/µm
|
|
|
Steifigkeit in Y
|
8 N/µm
|
8 N/µm
|
18 N/µm
|
18 N/µm
|
35 N/µm
|
35 N/µm
|
64 N/µm
|
64 N/µm
|
110 N/µm
|
110 N/µm
|
204 N/µm
|
204 N/µm
|
|
|
Steifigkeit in Z
|
26 N/µm
|
26 N/µm
|
96 N/µm
|
96 N/µm
|
96 N/µm
|
96 N/µm
|
210 N/µm
|
210 N/µm
|
385 N/µm
|
385 N/µm
|
788 N/µm
|
788 N/µm
|
|
|
Zulässige Druckkraft in X
|
57 N
|
57 N
|
115 N
|
115 N
|
229 N
|
229 N
|
344 N
|
344 N
|
577 N
|
577 N
|
1203 N
|
1203 N
|
max.
|
|
Zulässige Druckkraft in Y
|
57 N
|
57 N
|
115 N
|
115 N
|
229 N
|
229 N
|
344 N
|
344 N
|
577 N
|
577 N
|
1203 N
|
1203 N
|
max.
|
|
Zulässige Druckkraft in Z
|
134 N
|
134 N
|
536 N
|
536 N
|
536 N
|
536 N
|
1206 N
|
1206 N
|
2144 N
|
2144 N
|
4244 N
|
4244 N
|
max.
|
|
Zulässige Zugkraft in X
|
57 N
|
57 N
|
115 N
|
115 N
|
229 N
|
229 N
|
344 N
|
344 N
|
577 N
|
577 N
|
1203 N
|
1203 N
|
max.
|
|
Zulässige Zugkraft in Y
|
57 N
|
57 N
|
115 N
|
115 N
|
229 N
|
229 N
|
344 N
|
344 N
|
577 N
|
577 N
|
1203 N
|
1203 N
|
max.
|
|
Zulässige Zugkraft in Z
|
134 N
|
134 N
|
536 N
|
536 N
|
536 N
|
536 N
|
1206 N
|
1206 N
|
2144 N
|
2144 N
|
4244 N
|
4244 N
|
max.
|
|
Zulässiges Moment in θX
|
0,57 N·m
|
0,57 N·m
|
1,7 N·m
|
1,7 N·m
|
4,52 N·m
|
4,52 N·m
|
22,6 N·m
|
22,6 N·m
|
39,6 N·m
|
39,6 N·m
|
141,3 N·m
|
141,3 N·m
|
max.
|
|
Zulässiges Moment in θY
|
0,57 N·m
|
0,57 N·m
|
1,7 N·m
|
1,7 N·m
|
4,52 N·m
|
4,52 N·m
|
22,6 N·m
|
22,6 N·m
|
39,6 N·m
|
39,6 N·m
|
141,3 N·m
|
141,3 N·m
|
max.
|
|
Trägheitsmoment in θZ, unbelastet
|
290 kg·mm²
|
290 kg·mm²
|
1530 kg·mm²
|
1530 kg·mm²
|
2450 kg·mm²
|
2450 kg·mm²
|
10450 kg·mm²
|
10450 kg·mm²
|
32240 kg·mm²
|
32240 kg·mm²
|
196020 kg·mm²
|
196020 kg·mm²
|
±20 %
|
|
Bewegte Masse in θZ, unbelastet
|
400 g
|
400 g
|
1200 g
|
1200 g
|
1400 g
|
1400 g
|
3200 g
|
3200 g
|
6900 g
|
6900 g
|
21500 g
|
21500 g
|
±5 %
|
|
Lagertyp
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
Luftlager mit Luft-Vorspannung
|
|
|
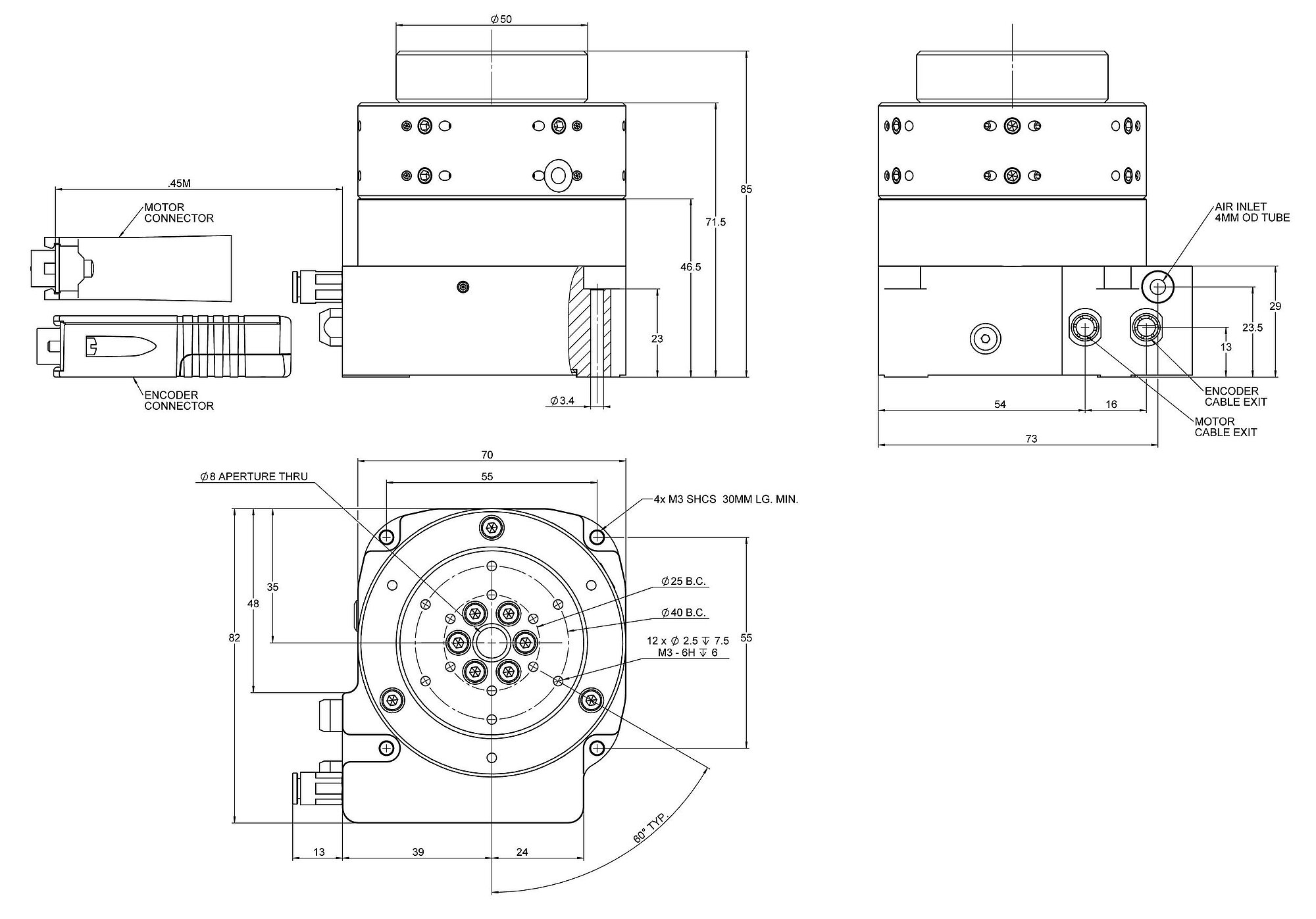
Länge des Lagersitzes
|
25 mm
|
25 mm
|
25 mm
|
25 mm
|
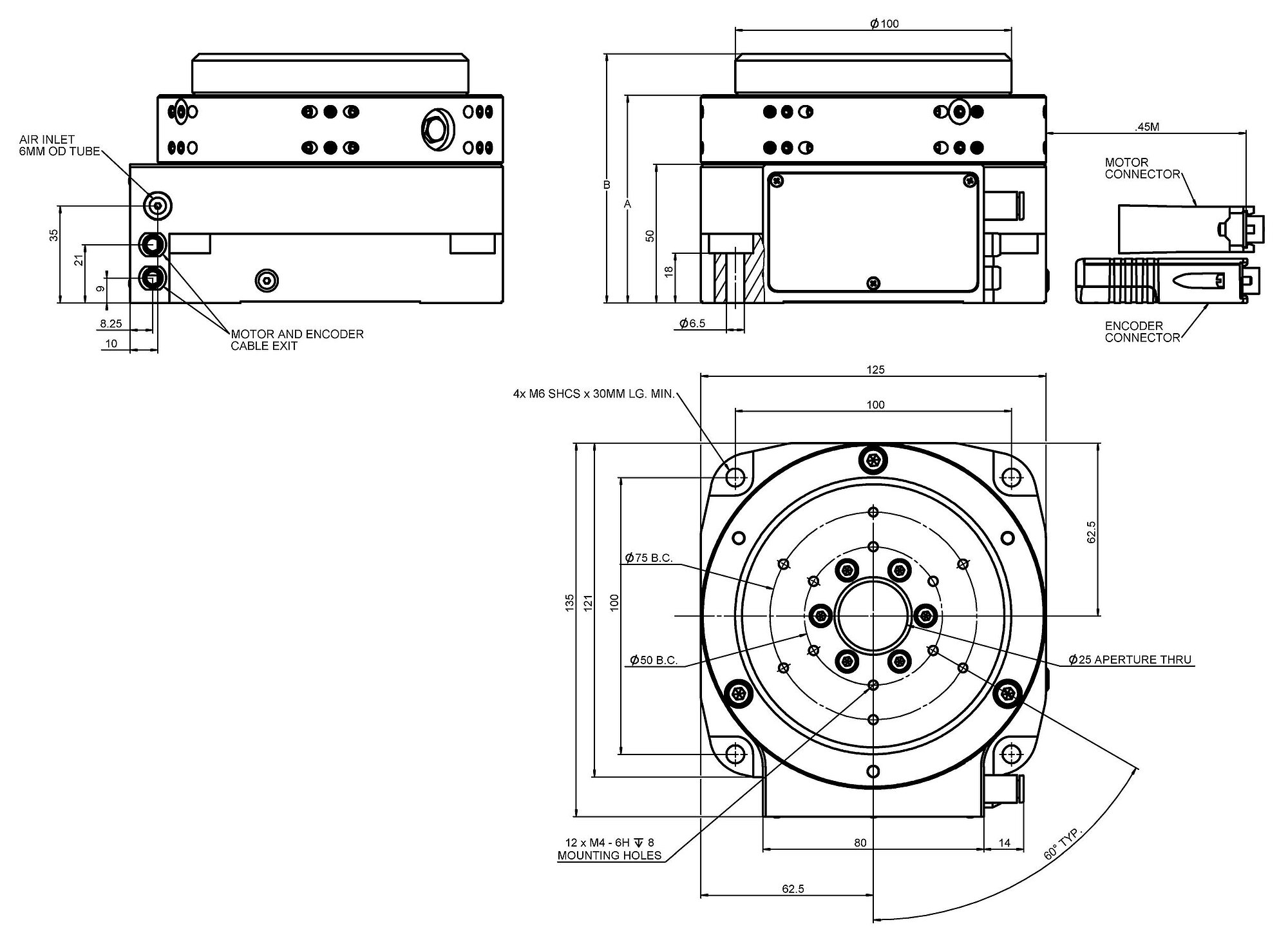
50 mm
|
50 mm
|
50 mm
|
50 mm
|
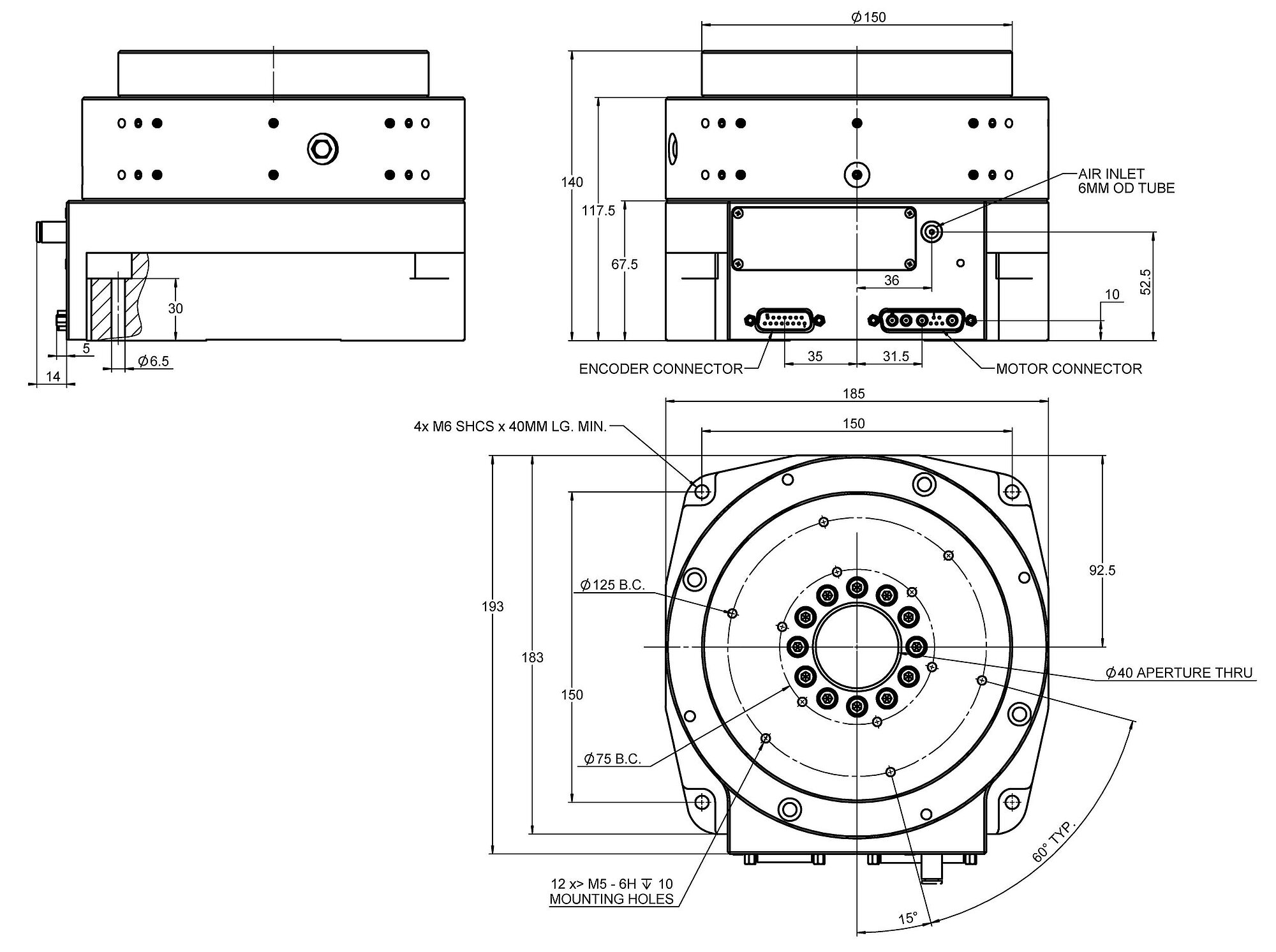
65 mm
|
65 mm
|
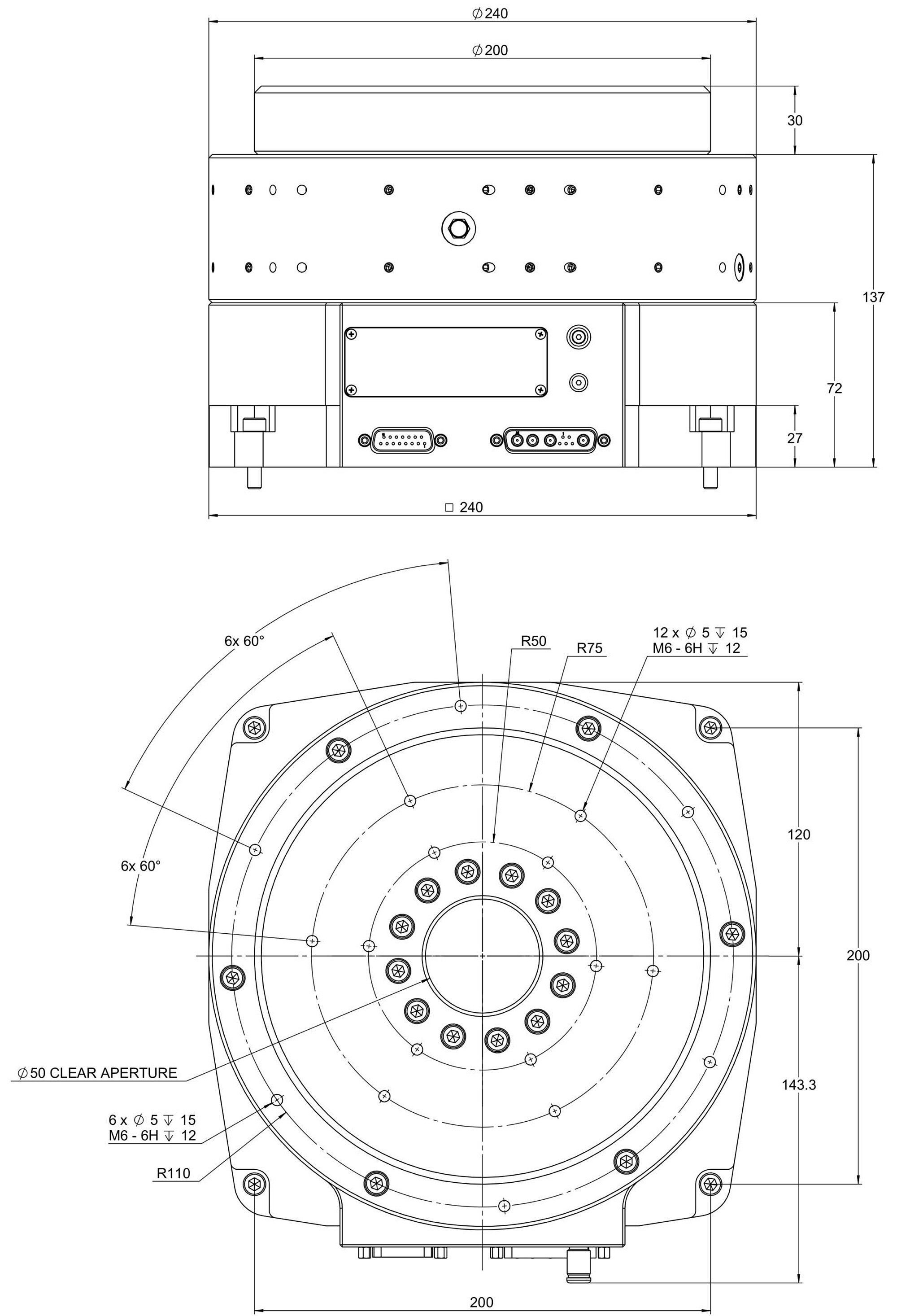
75 mm
|
75 mm
|
|
|
Gesamtmasse
|
1200 g
|
1200 g
|
3100 g
|
3100 g
|
4500 g
|
4500 g
|
8600 g
|
8600 g
|
14000 g
|
14000 g
|
50000 g
|
50000 g
|
±5 %
|
|
Material
| Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl | Aluminium, Edelstahl |
|
|
Durchmesser Bewegungsplattform
|
50 mm
|
50 mm
|
100 mm
|
100 mm
|
100 mm
|
100 mm
|
150 mm
|
150 mm
|
200 mm
|
200 mm
|
300 mm
|
300 mm
|
|
|
Anschlüsse und Umgebung
|
A-621.025A1
|
A-621.025B1
|
A-623.025A1
|
A-623.025B1
|
A-623.050A1
|
A-623.050B1
|
A-624.050A1
|
A-624.050B1
|
A-625.065A1
|
A-625.065B1
|
A-627.075A1
|
A-627.075B1
|
Toleranz
|
|
Betriebstemperaturbereich
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
15 bis 25 °C
|
|
|
Anschluss
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
|
|
Sensoranschluss
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
|
|
Betriebsdruck
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
515 bis 585 kPa
|
|
|
Luftdurchsatz
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
max.
|
|
Luftqualität
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
|
|
Empfohlene Controller/Treiber
| A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
|