|
Aktive Achsen
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
X ǀ Y
|
|
|
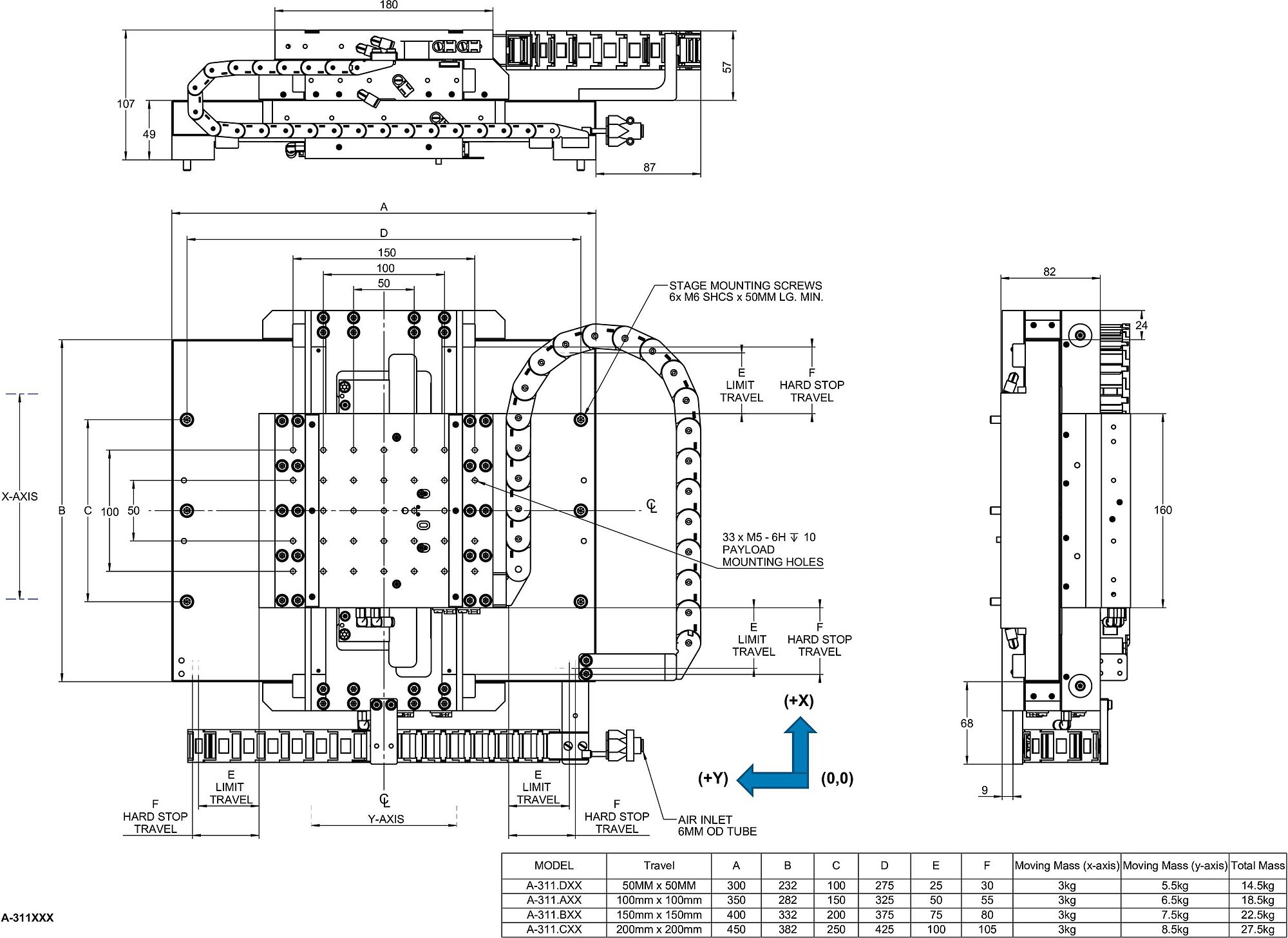
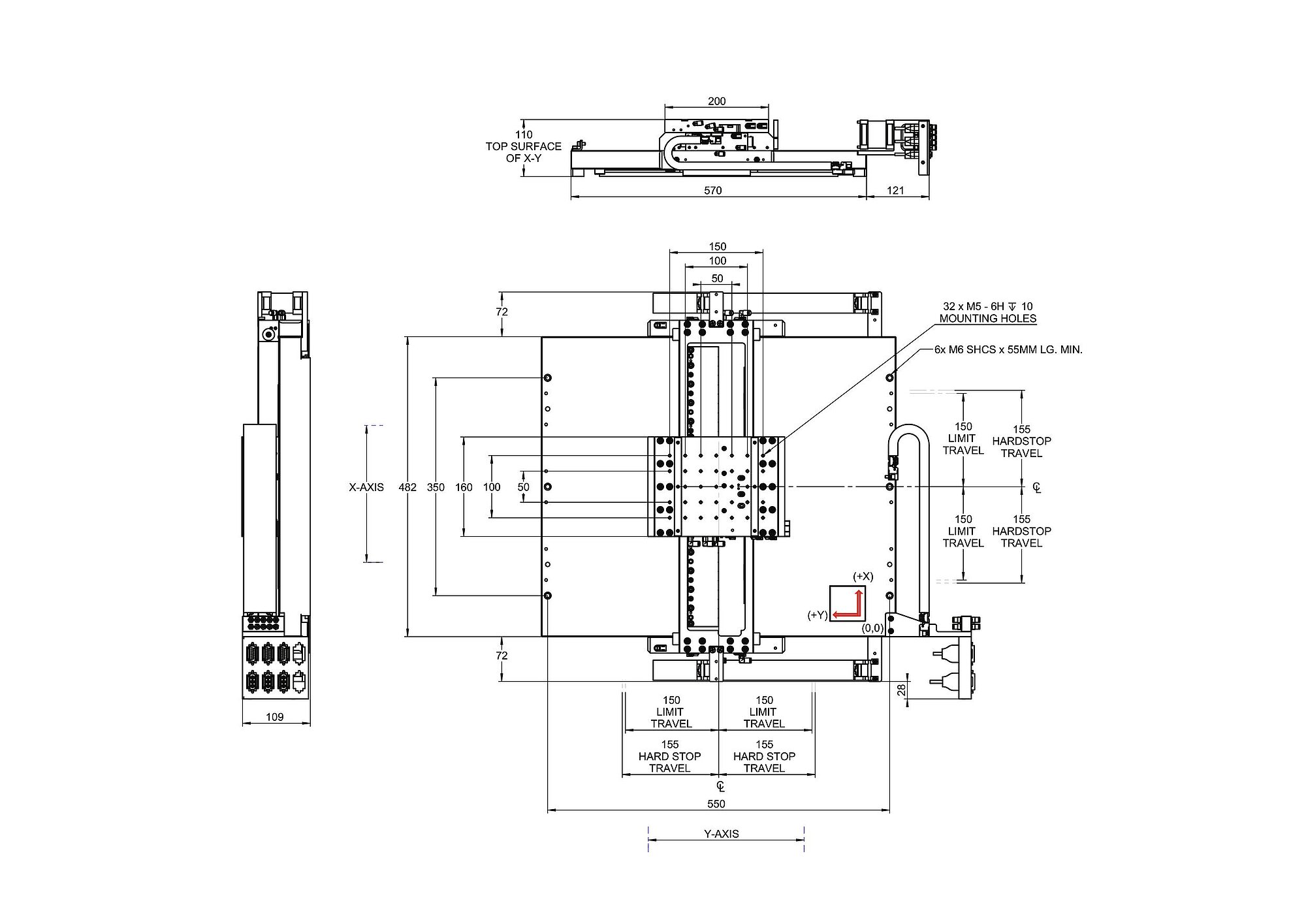
Stellweg in X
|
50 mm
|
50 mm
|
100 mm
|
100 mm
|
150 mm
|
150 mm
|
200 mm
|
200 mm
|
300 mm
|
300 mm
|
|
|
Stellweg in Y
|
50 mm
|
50 mm
|
100 mm
|
100 mm
|
150 mm
|
150 mm
|
200 mm
|
200 mm
|
300 mm
|
400 mm
|
|
|
Beschleunigung in X, unbelastet
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
27,5 m/s²
|
10 m/s²
|
10 m/s²
|
max.
|
|
Beschleunigung in Y, unbelastet
|
15 m/s²
|
15 m/s²
|
13 m/s²
|
13 m/s²
|
11 m/s²
|
11 m/s²
|
10 m/s²
|
10 m/s²
|
10 m/s²
|
10 m/s²
|
max.
|
|
Maximale Geschwindigkeit in X, unbelastet
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
1000 mm/s
|
1000 mm/s
|
|
|
Maximale Geschwindigkeit in Y, unbelastet
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
2000 mm/s
|
1000 mm/s
|
1000 mm/s
|
|
|
Orthogonalität
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 10 µrad
|
± 25 µrad
|
typ.
|
|
Geradheitsabweichung E_XY (Geradheit)
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,5 µm
|
± 0,5 µm
|
± 1 µm
|
± 1 µm
|
max.
|
|
Geradheitsabweichung E_YX (Geradheit)
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,5 µm
|
± 0,5 µm
|
± 1 µm
|
± 1 µm
|
max.
|
|
Geradheitsabweichung E_ZX (Ebenheit)
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,5 µm
|
± 0,5 µm
|
± 0,75 µm
|
± 0,75 µm
|
± 1,5 µm
|
± 1,5 µm
|
max.
|
|
Geradheitsabweichung E_ZY (Ebenheit)
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,25 µm
|
± 0,5 µm
|
± 0,5 µm
|
± 0,75 µm
|
± 0,75 µm
|
± 1,5 µm
|
± 1,5 µm
|
max.
|
|
Winkelabweichung E_AY (Nicken)
|
± 10 µrad
|
± 10 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 17,5 µrad
|
± 17,5 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
max.
|
|
Winkelabweichung E_BX (Nicken)
|
± 10 µrad
|
± 10 µrad
|
± 12,5 µrad
|
± 12,5 µrad
|
± 17,5 µrad
|
± 17,5 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
± 20 µrad
|
max.
|
|
Winkelabweichung E_CX (Gieren)
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 7,5 µrad
|
± 7,5 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
max.
|
|
Winkelabweichung E_CY (Gieren)
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 5 µrad
|
± 7,5 µrad
|
± 7,5 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
± 10 µrad
|
max.
|
|
Positionieren
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Toleranz
|
|
Positioniergenauigkeit in X, kalibriert
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
typ.
|
|
Positioniergenauigkeit in X, unkalibriert
|
± 1 µm
|
± 1 µm
|
± 1,5 µm
|
± 1,5 µm
|
± 2 µm
|
± 2 µm
|
± 2,5 µm
|
± 2,5 µm
|
—
|
—
|
typ.
|
|
Positioniergenauigkeit in Y, kalibriert
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
± 0,2 µm
|
typ.
|
|
Positioniergenauigkeit in Y, unkalibriert
|
± 1 µm
|
± 1 µm
|
± 1,5 µm
|
± 1,5 µm
|
± 2 µm
|
± 2 µm
|
± 2,5 µm
|
± 2,5 µm
|
—
|
—
|
typ.
|
|
Bidirektionale Wiederholgenauigkeit in X
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
max.
|
|
Bidirektionale Wiederholgenauigkeit in Y
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
0,1 µm
|
max.
|
|
Referenzschalter
|
Encoder-Index
|
—
|
Encoder-Index
|
—
|
Encoder-Index
|
—
|
Encoder-Index
|
—
|
—
|
—
|
|
|
Endschalter
|
Hall-Effekt, Schließer, 5 V bis 24 V, Open Collector
|
—
|
Hall-Effekt, Schließer, 5 V bis 24 V, Open Collector
|
—
|
Hall-Effekt, Schließer, 5 V bis 24 V, Open Collector
|
—
|
Hall-Effekt, Schließer, 5 V bis 24 V, Open Collector
|
—
|
—
|
—
|
|
|
Integrierter Sensor
|
Inkrementeller Linearencoder
|
Absoluter Linearencoder
|
Inkrementeller Linearencoder
|
Absoluter Linearencoder
|
Inkrementeller Linearencoder
|
Absoluter Linearencoder
|
Inkrementeller Linearencoder
|
Absoluter Linearencoder
|
Absoluter Linearencoder
|
Absoluter Linearencoder
|
|
|
Sensorsignal
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
Sin/Cos, 1 V Spitze-Spitze
|
BiSS-C
|
BiSS-C
|
BiSS-C
|
|
|
Sensorsignalperiode
|
20 µm
|
—
|
20 µm
|
—
|
20 µm
|
—
|
20 µm
|
—
|
—
|
—
|
|
|
Sensorauflösung
|
1,2 nm
|
1 nm
|
1,2 nm
|
1 nm
|
1,2 nm
|
1 nm
|
1,2 nm
|
1 nm
|
1 nm
|
1 nm
|
|
|
Antriebseigenschaften
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Toleranz
|
|
Antriebstyp
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
Eisenloser 3-Phasen-Linearmotor
|
|
|
Nennspannung
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
48 V
|
|
|
Spitzenspannung
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
80 V
|
|
|
Nennstrom, effektiv
|
3,2 A
|
3,2 A
|
3,2 A
|
3,2 A
|
3,2 A
|
3,2 A
|
3,2 A
|
3,2 A
|
2,9 A
|
2,9 A
|
typ.
|
|
Spitzenstrom, effektiv
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
6,9 A
|
10 A
|
10 A
|
typ.
|
|
Antriebskraft in X
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
58 N
|
58 N
|
typ.
|
|
Antriebskraft in Y
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
39 N
|
58 N
|
58 N
|
typ.
|
|
Spitzenkraft in X
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
200 N
|
200 N
|
|
|
Spitzenkraft in Y
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
85 N
|
200 N
|
200 N
|
|
|
Kraftkonstante
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
12,3 N/A
|
19,9 N/A
|
19,9 N/A
|
|
|
Widerstand Phase-Phase
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
3,6 Ω
|
5,6 Ω
|
5,6 Ω
|
typ.
|
|
Induktivität Phase-Phase
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,24 mH
|
1,8 mH
|
1,8 mH
|
|
|
Gegen-EMK Phase-Phase
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
10,1 V·s/m
|
16 V·s/m
|
16 V·s/m
|
max.
|
|
Polteilung N-N
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
30 mm
|
|
|
Mechanische Eigenschaften
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Toleranz
|
|
Zulässige Druckkraft in Z
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
147 N
|
max.
|
|
Bewegte Masse in X, unbelastet
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
3000 g
|
4000 g
|
4000 g
|
|
|
Bewegte Masse in Y, unbelastet
|
5500 g
|
5500 g
|
6500 g
|
6500 g
|
7500 g
|
7500 g
|
8500 g
|
8500 g
|
12500 g
|
15000 g
|
|
|
Führung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Luftvorspannung
|
Luftlager mit Vakuum-Vorspannung
|
Luftlager mit Vakuum-Vorspannung
|
|
|
Gesamtmasse
|
14500 g
|
14500 g
|
18500 g
|
18500 g
|
22500 g
|
22500 g
|
27500 g
|
27500 g
|
48000 g
|
55000 g
|
|
|
Material
| Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl | Hartbeschichtetes Aluminium, Befestigungsmaterial aus Edelstahl |
|
|
Anschlüsse und Umgebung
|
A-311.DA1
|
A-311.DB1
|
A-311.AA1
|
A-311.AB1
|
A-311.BA1
|
A-311.BB1
|
A-311.CA1
|
A-311.CB1
|
A-311.FB1
|
A-311.GB1
|
Toleranz
|
|
Betriebstemperaturbereich
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
+15 bis +25 °C
|
|
|
Anschluss
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 9W4 (m)
|
D-Sub 3W3 (m)
|
D-Sub 3W3 (m)
|
|
|
Sensoranschluss
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
D-Sub 15 (m)
|
|
|
Betriebsdruck
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
415 bis 485 (60 bis 70 psi) kPa
|
|
|
Luftdurchsatz
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
56 L/min
|
max.
|
|
Luftqualität
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
Rein (gefiltert bis zu 1,0 μm oder besser) - ISO 8573–1 Klasse 1 ǀ Ölfrei - ISO 8573–1 Klasse 1 ǀ Trocken (-15 °C Taupunkt) - ISO 8573–1 Klasse 3
|
|
|
Empfohlene Controller/Treiber
| A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x | A-81x, A-82x |
|