L-406.10DD10
Kompakter Lineartisch; DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung; optische Endschalter

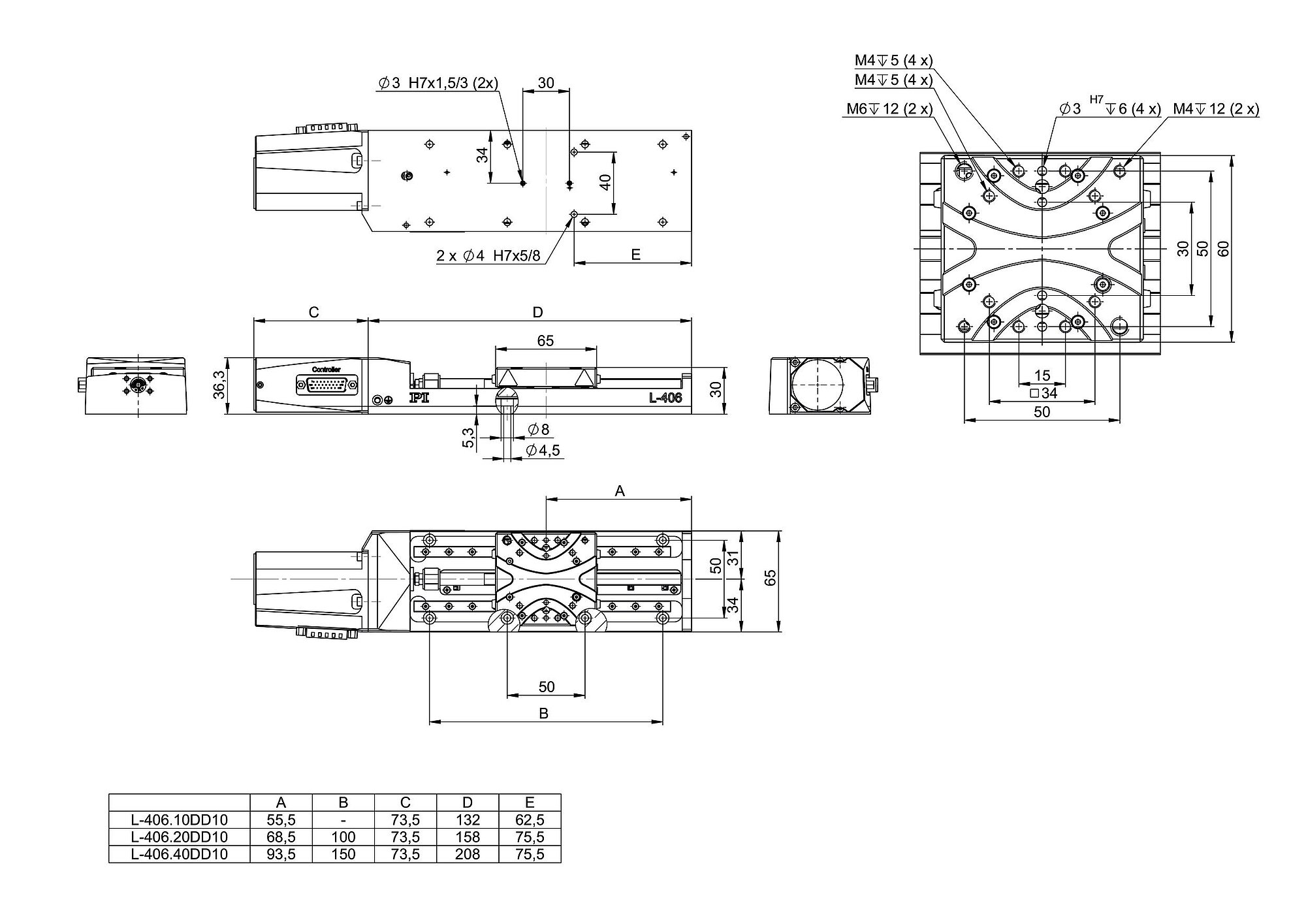
L-406 mit DC-Motor, Abmessungen in mm

L-406 mit DC-Getriebemotor, Abmessungen in mm
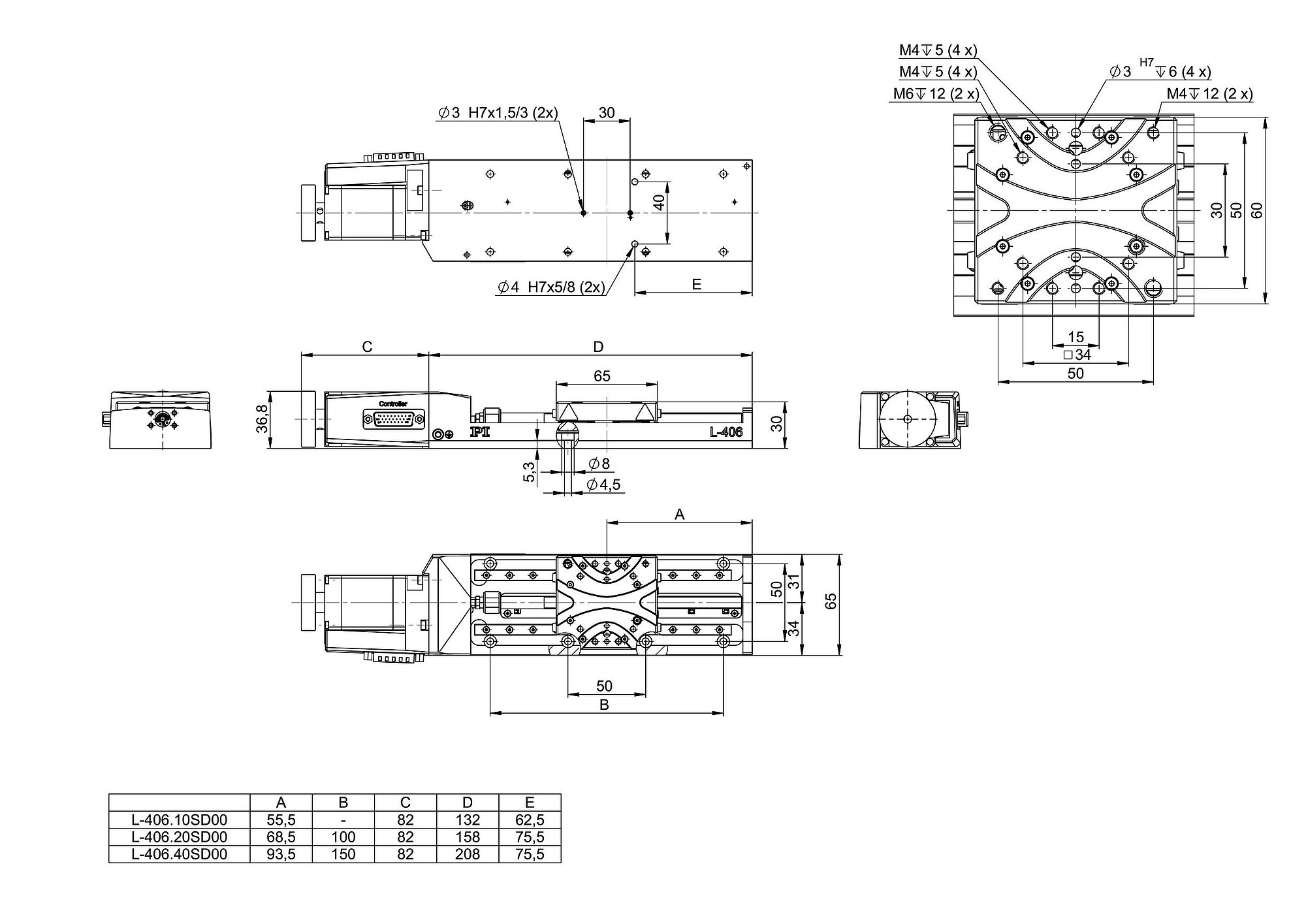
L-406 mit 2-Phasen-Schrittmotor, Abmessungen in mm

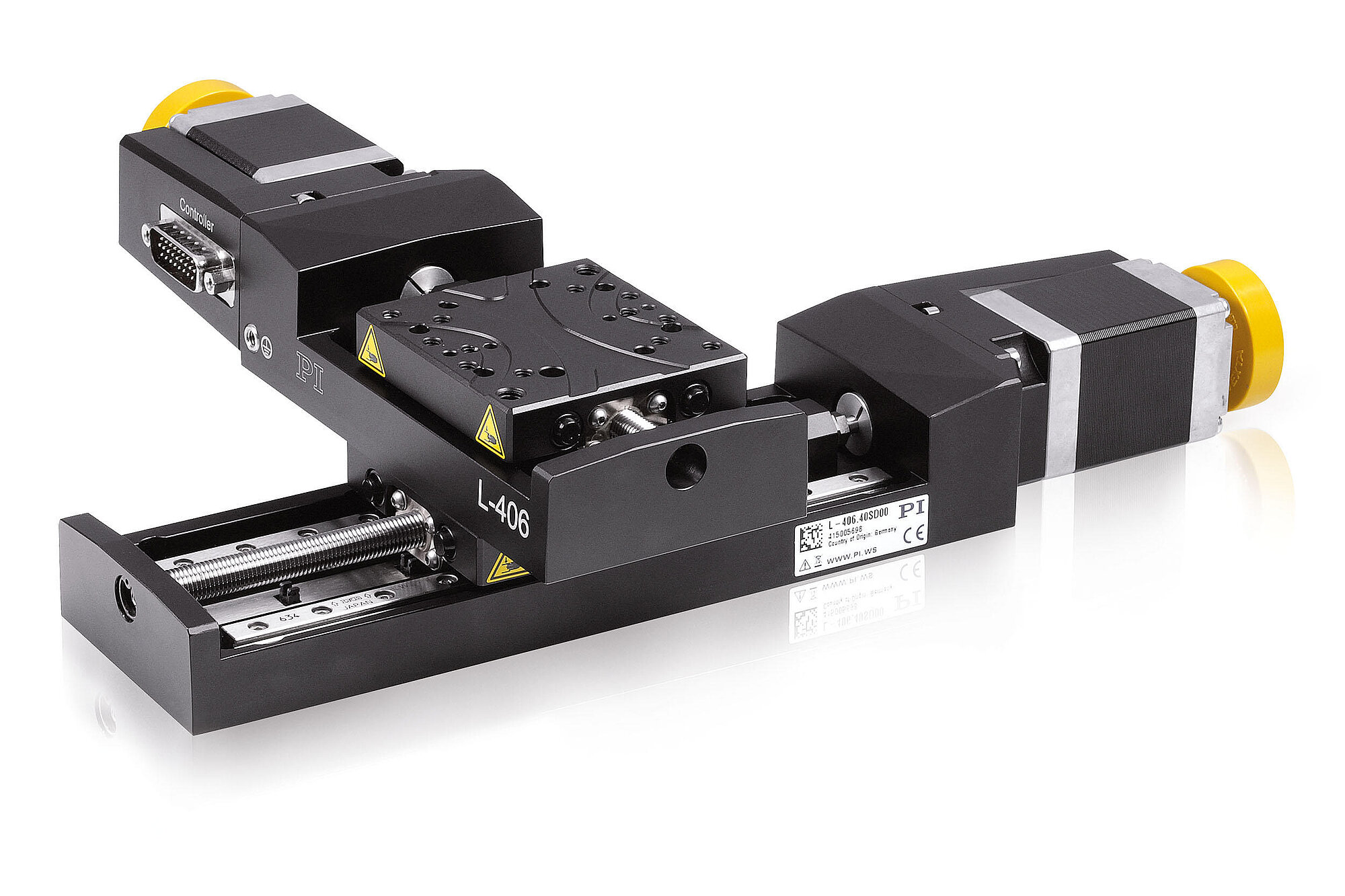
L-406 Lineartische können ohne Adapterplatten für Positionierung in mehreren Achsen kombiniert werden.






Lineartisch der Präzisionsklasse
Der Lineartisch verfügt über eine geschliffene Präzisionsgewindespindel, die für ruhigen und gleichmäßigen Lauf sorgt. In Kombination mit der Kugelumlaufführung und dem Grundprofil aus entspanntem Aluminium werden gute Leistungsdaten erzielt.
Antriebsarten
Kontaktlose optische Endschalter. Kontaktloser optischer Referenzschalter mit Richtungserkennung in der Mitte des Stellwegs. Integrierter Rotationsencoder auf der Motorwelle (Varianten mit DC-Servomotor).
Kugelumlaufführungen
Kugelumlaufführungen zeichnen sich bei entsprechend sorgfältiger Montage durch eine vorteilhafte Kombination aus hoher Belastbarkeit, Lebensdauer, Wartungsfreiheit und Führungsgenauigkeit aus. Der bewegliche Teil der Tische wird von vier vorgespannten Kugelumlaufschuhen, die auf zwei Führungsschienen laufen, getragen. Jeder Lagerschuh beinhaltet zwei unabhängige Reihen umlaufender Kugeln.
Einsatzgebiete
Präzisions-Mikromontage. Forschung. Automatisierung.
| Bewegen | L-406.10DD10 | L-406.20DD10 | L-406.40DD10 | L-406.10DG10 | L-406.20DG10 | L-406.40DG10 | L-406.10SD00 | L-406.20SD00 | L-406.40SD00 | Toleranz |
|---|---|---|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | X | X | X | |
| Stellweg in X | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | 26 mm | 52 mm | 102 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 20 mm/s | 20 mm/s | 20 mm/s | 3 mm/s | 3 mm/s | 3 mm/s | 20 mm/s | 20 mm/s | 20 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 2 µm | ± 4 µm | ± 6 µm | ± 2 µm | ± 4 µm | ± 6 µm | ± 2 µm | ± 4 µm | ± 6 µm | typ. |
| Geradheitsabweichung in Z (Ebenheit) | ± 2 µm | ± 4 µm | ± 6 µm | ± 2 µm | ± 4 µm | ± 6 µm | ± 2 µm | ± 4 µm | ± 6 µm | typ. |
| Winkelabweichung um Y (Nicken) | ± 70 µrad | ± 90 µrad | ± 100 µrad | ± 70 µrad | ± 90 µrad | ± 100 µrad | ± 70 µrad | ± 90 µrad | ± 100 µrad | typ. |
| Winkelabweichung um Z (Gieren) | ± 70 µrad | ± 90 µrad | ± 100 µrad | ± 70 µrad | ± 90 µrad | ± 100 µrad | ± 70 µrad | ± 90 µrad | ± 100 µrad | typ. |
| Positionieren | L-406.10DD10 | L-406.20DD10 | L-406.40DD10 | L-406.10DG10 | L-406.20DG10 | L-406.40DG10 | L-406.10SD00 | L-406.20SD00 | L-406.40SD00 | Toleranz |
| Kleinste Schrittweite in X | 0,5 µm | 0,5 µm | 0,5 µm | 0,2 µm | 0,2 µm | 0,2 µm | 0,2 µm | 0,2 µm | 0,2 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in X | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | 10 µm | typ. |
| Referenzschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Endschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Integrierter Sensor | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | Inkrementeller Rotationsencoder | — | — | — | |
| Systemauflösung in X | 244 nm | 244 nm | 244 nm | 16,4726 nm | 16,4726 nm | 16,4726 nm | 312,5 nm | 312,5 nm | 312,5 nm | |
| Sensorauflösung | 4096 Impulse/U | 4096 Impulse/U | 4096 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | 2048 Impulse/U | — | — | — | |
| Antriebseigenschaften | L-406.10DD10 | L-406.20DD10 | L-406.40DD10 | L-406.10DG10 | L-406.20DG10 | L-406.40DG10 | L-406.10SD00 | L-406.20SD00 | L-406.40SD00 | Toleranz |
| Antriebstyp | DC-Motor | DC-Motor | DC-Motor | DC-Getriebemotor | DC-Getriebemotor | DC-Getriebemotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | |
| Betriebsspannung | 24 V | 24 V | 24 V | 12 V | 12 V | 12 V | 24 V | 24 V | 24 V | |
| Antriebskraft in X | 15 N | 15 N | 15 N | 100 N | 100 N | 100 N | 50 N | 50 N | 50 N | typ. |
| Motorauflösung | — | — | — | — | — | — | 200 Vollschritte/U | 200 Vollschritte/U | 200 Vollschritte/U | |
| Mechanische Eigenschaften | L-406.10DD10 | L-406.20DD10 | L-406.40DD10 | L-406.10DG10 | L-406.20DG10 | L-406.40DG10 | L-406.10SD00 | L-406.20SD00 | L-406.40SD00 | Toleranz |
| Zulässige Druckkraft in Y | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | max. |
| Zulässige Druckkraft in Z | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| Zulässiges Moment in θX | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | max. |
| Zulässiges Moment in θY | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | max. |
| Zulässiges Moment in θZ | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | 7,5 N·m | max. |
| Haltekraft in X, passiv | 15 N | 15 N | 15 N | 100 N | 100 N | 100 N | 50 N | 50 N | 50 N | |
| Bewegte Masse in X, unbelastet | 160 g | 160 g | 160 g | 160 g | 160 g | 160 g | 160 g | 160 g | 160 g | |
| Spindeltyp | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | Trapezgewindespindel | |
| Spindelsteigung | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | 1 mm | |
| Führung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | |
| Gesamtmasse | 800 g | 900 g | 1000 g | 800 g | 900 g | 1000 g | 800 g | 900 g | 1000 g | |
| Material | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | |
| Getriebeuntersetzung i | — | — | — | 2401 : 81 | 2401 : 81 | 2401 : 81 | — | — | — | |
| Anschlüsse und Umgebung | L-406.10DD10 | L-406.20DD10 | L-406.40DD10 | L-406.10DG10 | L-406.20DG10 | L-406.40DG10 | L-406.10SD00 | L-406.20SD00 | L-406.40SD00 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | |
| Empfohlene Controller/Treiber | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-863.12 C-885 mit C-863.20C885 C-884.4DC, C-884.6DC Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS-Controller |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
L-406 Kompakter Linearversteller
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Kompakter Lineartisch; DC-Motor; 26 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; DC-Motor; 52 mm Stellweg; 1000 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; DC-Motor; 102 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 4096 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; DC-Getriebemotor; 26 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; DC-Getriebemotor; 52 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; DC-Getriebemotor; 102 mm Stellweg; 100 N Belastbarkeit; 3 mm/s maximale Geschwindigkeit; Trapezgewindespindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Sensorauflösung; optische Endschalter
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 26 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; optische Endschalter
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 52 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; optische Endschalter
Kompakter Lineartisch; 2-Phasen-Schrittmotor; 102 mm Stellweg; 100 N Belastbarkeit; 20 mm/s maximale Geschwindigkeit; Trapezgewindespindel; optische Endschalter
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.












