L-306.011100
Kompakter Präzisionshubtisch; 2-Phasen-Schrittmotor; 13 mm Stellweg; 20 N Belastbarkeit; 5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; 0,5 m Kabellänge

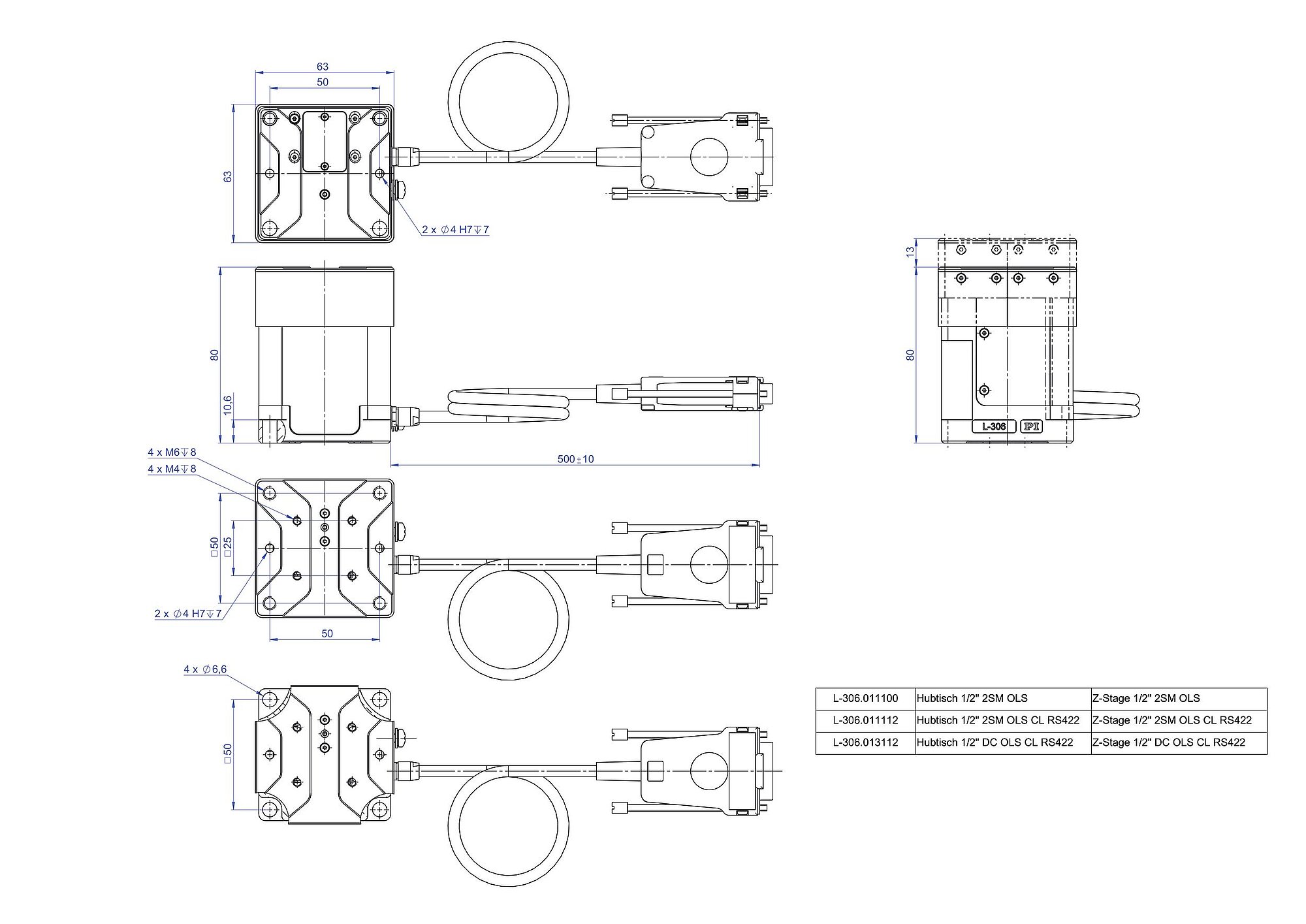
L-306, Abmessungen in mm


Kompakter Hubtisch, vielseitig einsetzbar
Hubtisch mit kompakter Baugröße durch gefalteten Antrieb mit Riemengetriebe. Passt auf Lineartische mit M6 50 mm × 50 mm Anschlussraster (z.B. L-406).
Antrieb
Positionsmessung
Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht.
Kreuzrollenführung
Bei Kreuzrollenführungen wird der Punktkontakt der Kugeln in Kugelführungen durch den Linienkontakt gehärteter Rollen ersetzt. Sie sind dadurch wesentlich steifer und kommen mit geringerer Vorspannung aus, was die Reibung reduziert und einen gleichmäßigeren Lauf ermöglicht. Kreuzrollenführungen zeichnen sich darüber hinaus durch hohe Führungsgenauigkeit und Tragfähigkeit aus. Zwangsgesteuerte Wälzkörperkäfige verhindern Käfigwandern.
Einsatzgebiete
Forschung. Halbleitertechnik. Photonik. Automatisierung.
| Bewegen | L-306.011100 | L-306.011112 | L-306.013112 | Toleranz |
|---|---|---|---|---|
| Aktive Achsen | Z | Z | Z | |
| Stellweg in Z | 13 mm | 13 mm | 13 mm | |
| Maximale Geschwindigkeit in Z, unbelastet | 5 mm/s | 5 mm/s | 5 mm/s | |
| Geradheitsabweichung in X | ± 3 µm | ± 3 µm | ± 3 µm | typ. |
| Geradheitsabweichung in Y | ± 3 µm | ± 3 µm | ± 3 µm | typ. |
| Winkelabweichung um X | ± 150 µrad | ± 150 µrad | ± 150 µrad | typ. |
| Winkelabweichung um Y | ± 175 µrad | ± 175 µrad | ± 175 µrad | typ. |
| Positionieren | L-306.011100 | L-306.011112 | L-306.013112 | Toleranz |
| Kleinste Schrittweite in Z | 2,5 µm | 0,1 µm | 0,1 µm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | ± 0,25 µm | ± 0,05 µm | ± 0,05 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in Z | 4 µm | 1 µm | 1 µm | typ. |
| Referenzschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Endschalter | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | Gabellichtschranke, Öffner, 5 V, NPN | |
| Integrierter Sensor | — | Inkrementeller Linearencoder | Inkrementeller Linearencoder | |
| Sensorsignal | — | A/B-Quadratur, RS-422 | A/B-Quadratur, RS-422 | |
| Sensorauflösung | — | 5 nm | 50 nm | |
| Antriebseigenschaften | L-306.011100 | L-306.011112 | L-306.013112 | Toleranz |
| Antriebstyp | 2-Phasen-Schrittmotor | 2-Phasen-Schrittmotor | DC-Motor | |
| Antriebskraft in positiver Bewegungsrichtung in Z | 20 N | 20 N | 20 N | typ. |
| Antriebskraft in negativer Bewegungsrichtung in Z | 20 N | 20 N | 20 N | typ. |
| Mechanische Eigenschaften | L-306.011100 | L-306.011112 | L-306.013112 | Toleranz |
| Zulässige Druckkraft in Y | 10 N | 10 N | 10 N | max. |
| Zulässige Druckkraft in Z | 20 N | 20 N | 20 N | max. |
| Zulässiges Moment in θX | 1 N·m | 1 N·m | 1 N·m | max. |
| Zulässiges Moment in θY | 1 N·m | 1 N·m | 1 N·m | max. |
| Zulässiges Moment in θZ | 2 N·m | 2 N·m | 2 N·m | max. |
| Haltekraft in Z, passiv | 20 N | 20 N | — | |
| Bewegte Masse in Z, unbelastet | 180 g | 180 g | 180 g | |
| Spindeltyp | Kugelumlaufspindel | Kugelumlaufspindel | Kugelumlaufspindel | |
| Spindelsteigung | 0,5 mm | 0,5 mm | 0,5 mm | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | |
| Gesamtmasse | 600 g | 600 g | 600 g | |
| Material | Aluminium eloxiert, Stahl | Aluminium eloxiert, Stahl | Aluminium eloxiert, Stahl | |
| Anschlüsse und Umgebung | L-306.011100 | L-306.011112 | L-306.013112 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | HD D-Sub 26 (m) | HD D-Sub 26 (m) | HD D-Sub 26 (m) | |
| Kabellänge | 0,5 m | 0,5 m | 0,5 m | |
| Empfohlene Controller / Treiber | C-663.12 C-885 mit C-663.12C885 Modularer ACS Controller | C-663.12 C-885 mit C-663.12C885 Modularer ACS Controller | C-863.12 C-885 mit C-863.20C885 Modularer ACS Controller |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
Compact Z positioner L-306.011100 / 011112 / 013112
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Kompakter Präzisionshubtisch; 2-Phasen-Schrittmotor; 13 mm Stellweg; 20 N Belastbarkeit; 5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; 0,5 m Kabellänge
Kompakter Präzisionshubtisch; 2-Phasen-Schrittmotor; 13 mm Stellweg; 20 N Belastbarkeit; 5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 5 nm Sensorauflösung, A/B-Quadratur, RS-422; 0,5 m Kabellänge
Kompakter Präzisionshubtisch; DC-Motor; 13 mm Stellweg; 20 N Belastbarkeit; 5 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Linearencoder, 50 nm Sensorauflösung, A/B-Quadratur, RS-422; 0,5 m Kabellänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.





