P-518.TCD
Piezo-Hub- und Kipptisch; 100 µm Stellweg; 1 mrad × 1 mrad Rotationswinkel (θX × θY); Kapazitiv, indirekte Positionsmessung; D-Sub 25W3 (m); 1,5 m Kabellänge

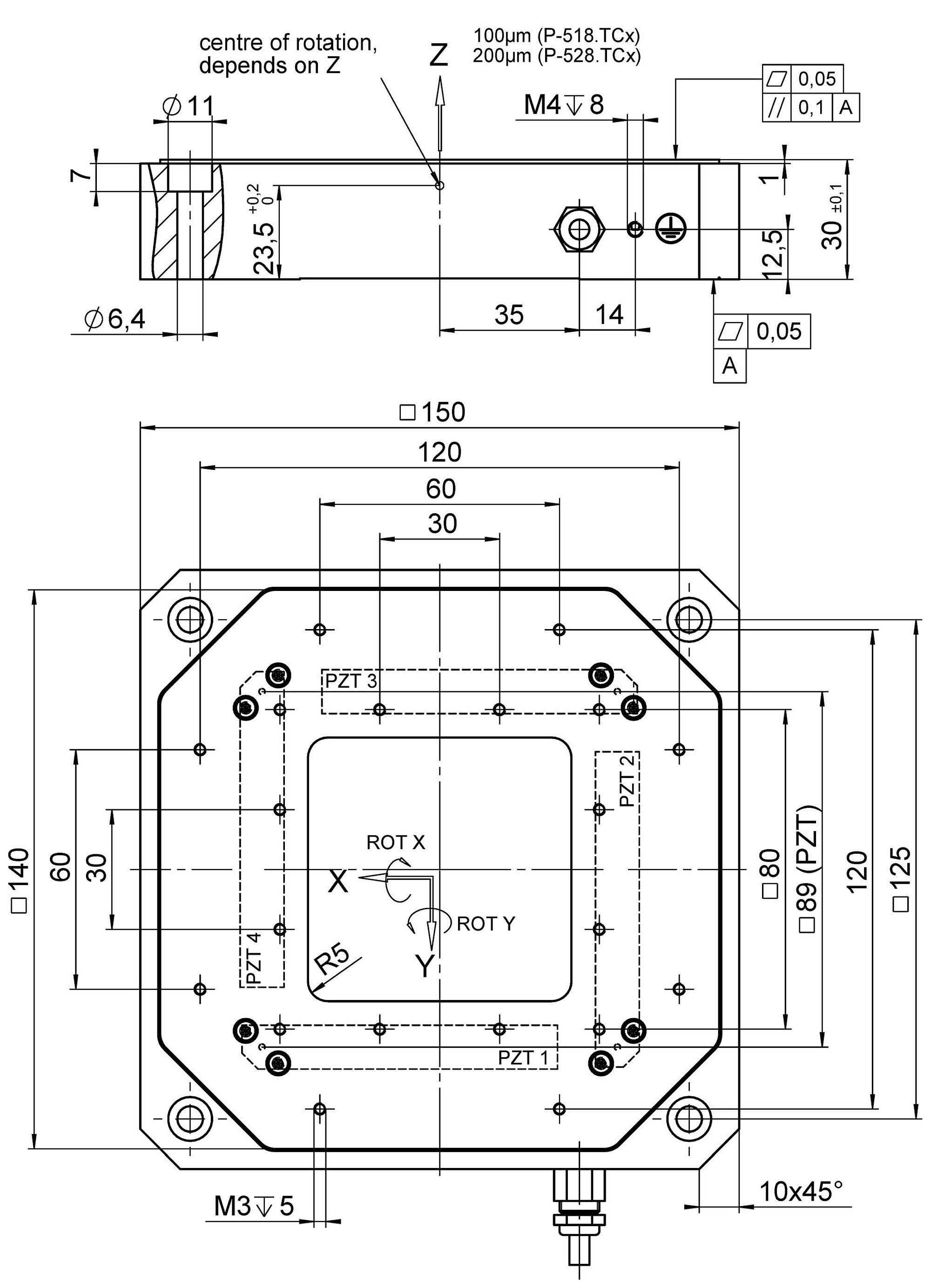
Hub- und Kipptisch P-518, P-528, Abmessungen in mm
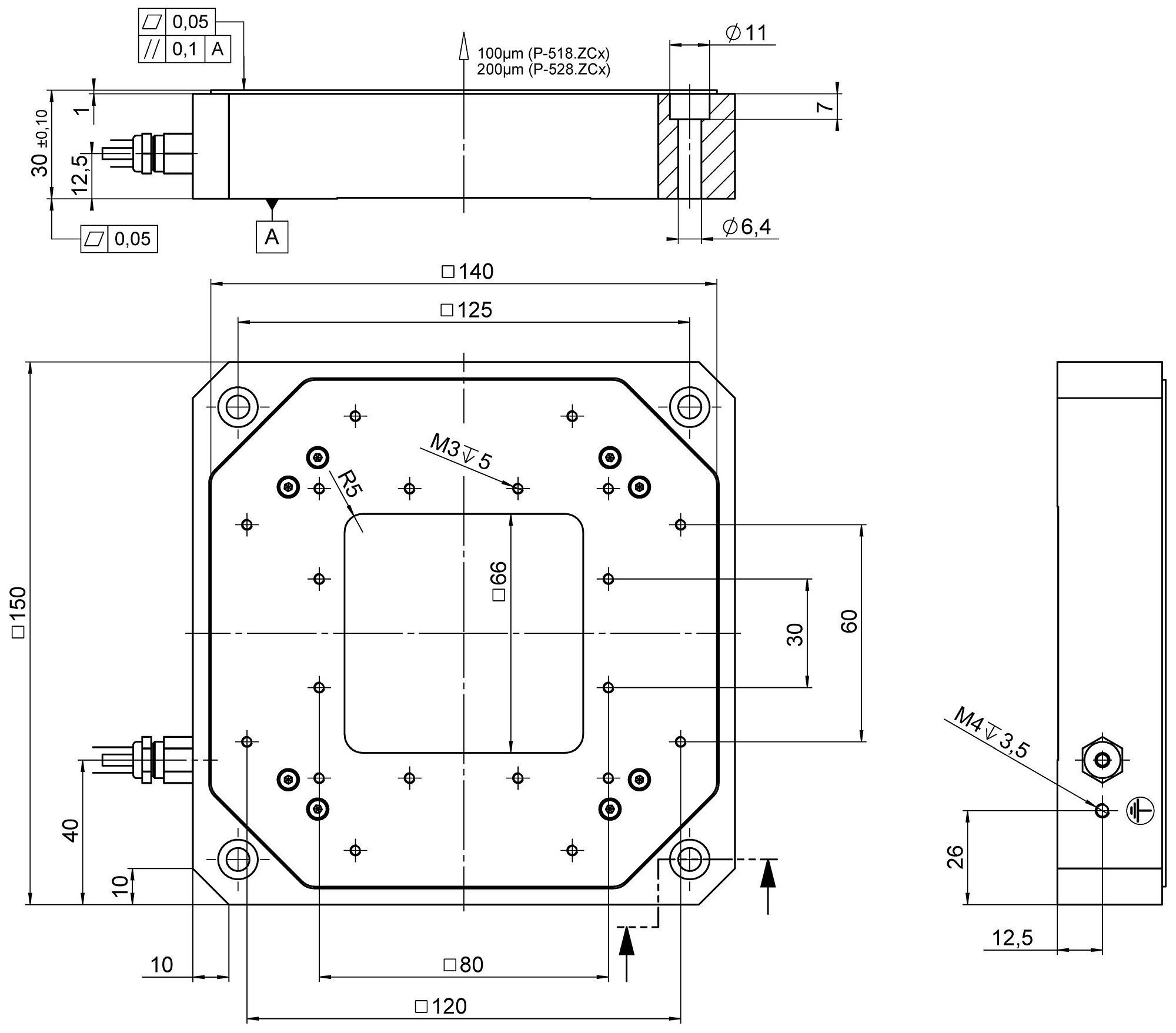
Hubtisch P-518, P-528, Abmessungen in mm



Einsatzgebiete
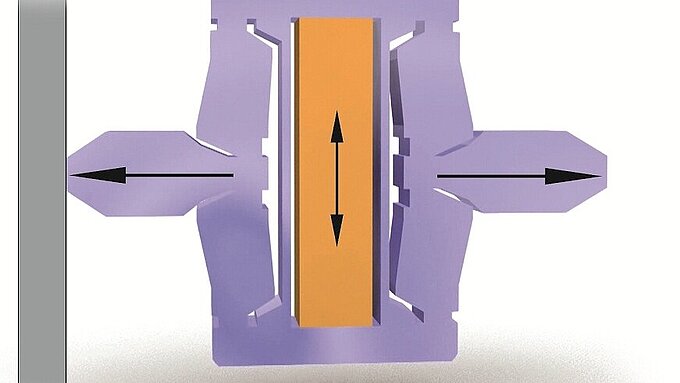
Überragende Lebensdauer dank PICMA® Piezoaktoren
Die PICMA® Piezoaktoren sind vollkeramisch isoliert. Dies schützt sie vor Luftfeuchtigkeit und Ausfällen durch erhöhten Leckstrom. PICMA® Aktoren bieten eine bis zu zehnmal höhere Lebensdauer als konventionelle polymerisolierte Aktoren. 100 Milliarden Zyklen ohne einen einzigen Ausfall sind erwiesen.
Sub-Nanometer-Auflösung mit kapazitiven Sensoren
Kapazitive Sensoren messen kontaktfrei mit Sub-Nanometer-Auflösung. Sie garantieren eine herausragende Linearität der Bewegung, eine hohe Langzeitstabilität und eine Bandbreite im kHz-Bereich.
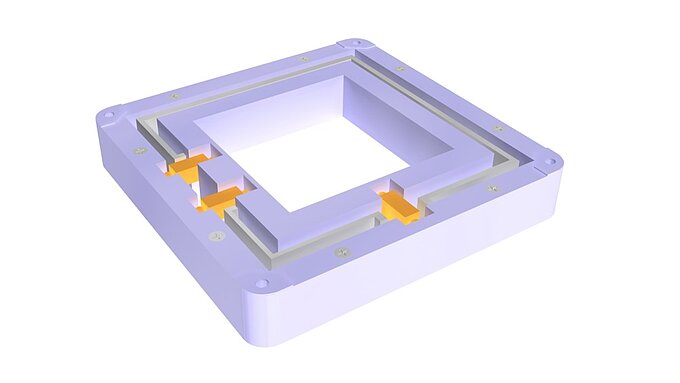
Hohe Führungsgenauigkeit durch spielfreie Festkörpergelenkführungen
Festkörpergelenkführungen sind wartungs-, reibungs- und verschleißfrei und benötigen keine Schmierstoffe. Ihre Steifigkeit macht sie hoch belastbar und unempfindlich gegen Schockbelastungen und Vibrationen. Sie arbeiten in einem weiten Temperaturbereich.
Automatische Konfiguration und schneller Komponentenaustausch
Mechanik und Controller können beliebig kombiniert und schnell ausgetauscht werden. Alle Servo- und Linearisierungsparameter sind im ID-Chip des D-Sub-Steckers der Mechanik gespeichert. Die Auto-Calibration-Funktion der Digitalcontroller verwendet diese Daten automatisch bei jedem Einschalten des Controllers.
Hohe Bahntreue im Nanometerbereich durch parallele Positionsmessung
Alle Freiheitsgrade werden gegen eine einzige feste Referenz vermessen. Ungewolltes Übersprechen der Bewegung in eine andere Achse kann in Echtzeit (abh. von der Bandbreite) ausgeregelt werden (aktive Führung). Auch im dynamischen Betrieb wird damit eine hohe Bahntreue im Nanometerbereich erreicht.
| Bewegen | P-518.TCD | P-518.ZCD | P-518.ZCL | P-528.TCD | P-528.ZCD | P-528.ZCL | Toleranz |
|---|---|---|---|---|---|---|---|
| Aktive Achsen | Z ǀ θX ǀ θY | Z | Z | Z ǀ θX ǀ θY | Z | Z | |
| Stellweg in Z | 100 µm | 100 µm | 100 µm | 200 µm | 200 µm | 200 µm | |
| Stellweg in Z, ungeregelt | 140 µm | 140 µm | 140 µm | 240 µm | 240 µm | 240 µm | ±20 % |
| Rotationsbereich in θX | 1 mrad | — | — | 2 mrad | — | — | |
| Rotationsbereich in θY | 1 mrad | — | — | 2 mrad | — | — | |
| Rotationsbereich in θX, ungeregelt | 1,4 mrad | — | — | 2,4 mrad | — | — | ±20 % |
| Rotationsbereich in θY, ungeregelt | 1,4 mrad | — | — | 2,4 mrad | — | — | ±20 % |
| Linearitätsabweichung in Z | 0,03 % | 0,03 % | 0,03 % | 0,03 % | 0,03 % | 0,03 % | typ. |
| Linearitätsabweichung in θX | 0,15 % | — | — | 0,15 % | — | — | typ. |
| Linearitätsabweichung in θY | 0,15 % | — | — | 0,15 % | — | — | typ. |
| Winkelabweichung E_AZ | ± 25 µrad | ± 25 µrad | ± 25 µrad | ± 50 µrad | ± 50 µrad | ± 50 µrad | max. |
| Winkelabweichung E_BZ | ± 25 µrad | ± 25 µrad | ± 25 µrad | ± 50 µrad | ± 50 µrad | ± 50 µrad | max. |
| Winkelabweichung E_CZ | ± 5 µrad | ± 5 µrad | ± 5 µrad | ± 10 µrad | ± 10 µrad | ± 10 µrad | max. |
| Positionieren | P-518.TCD | P-518.ZCD | P-518.ZCL | P-528.TCD | P-528.ZCD | P-528.ZCL | Toleranz |
| Bidirektionale Wiederholgenauigkeit in Z | 5 nm | 5 nm | 5 nm | 10 nm | 10 nm | 10 nm | typ. |
| Bidirektionale Wiederholgenauigkeit in θX | 0,05 µrad | — | — | 0,1 µrad | — | — | typ. |
| Bidirektionale Wiederholgenauigkeit in θY | 0,05 µrad | — | — | 0,1 µrad | — | — | typ. |
| Auflösung in Z, ungeregelt | 0,4 nm | 0,2 nm | 0,2 nm | 0,6 nm | 0,6 nm | 0,6 nm | typ. |
| Auflösung in θX, ungeregelt | 0,04 µrad | — | — | 0,06 µrad | — | — | typ. |
| Auflösung in θY, ungeregelt | 0,04 µrad | — | — | 0,06 µrad | — | — | typ. |
| Integrierter Sensor | Kapazitiv, indirekte Positionsmessung | Kapazitiv, direkte Positionsmessung | Kapazitiv, direkte Positionsmessung | Kapazitiv, indirekte Positionsmessung | Kapazitiv, direkte Positionsmessung | Kapazitiv, direkte Positionsmessung | |
| Systemauflösung in Z | 0,8 nm | 0,8 nm | 0,8 nm | 1 nm | 1 nm | 1 nm | |
| Systemauflösung in θX | 0,05 µrad | — | — | 0,1 µrad | — | — | |
| Systemauflösung in θY | 0,05 µrad | — | — | 0,1 µrad | — | — | |
| Antriebseigenschaften | P-518.TCD | P-518.ZCD | P-518.ZCL | P-528.TCD | P-528.ZCD | P-528.ZCL | Toleranz |
| Antriebstyp | PICMA® | PICMA® | PICMA® | PICMA® | PICMA® | PICMA® | |
| Elektrische Kapazität in Z | 2,1 µF | 8,4 µF | 8,4 µF | 3,7 µF | 14,8 µF | 14,8 µF | ±20 % |
| Mechanische Eigenschaften | P-518.TCD | P-518.ZCD | P-518.ZCL | P-528.TCD | P-528.ZCD | P-528.ZCL | Toleranz |
| Steifigkeit in Z | 2,7 N/µm | 2,7 N/µm | 2,7 N/µm | 1,5 N/µm | 1,5 N/µm | 1,5 N/µm | ±20 % |
| Resonanzfrequenz in Z, unbelastet | 500 Hz | 500 Hz | 500 Hz | 350 Hz | 350 Hz | 350 Hz | ±20 % |
| Resonanzfrequenz in Z, belastet mit 500 g | 350 Hz | 350 Hz | 350 Hz | 210 Hz | 210 Hz | 210 Hz | ±20 % |
| Resonanzfrequenz in Z, belastet mit 2500 g | 200 Hz | 200 Hz | 200 Hz | 130 Hz | 130 Hz | 130 Hz | ±20 % |
| Resonanzfrequenz in θX, unbelastet | 530 Hz | — | — | 390 Hz | — | — | ±20 % |
| Resonanzfrequenz in θX, belastet mit 500 g | 370 Hz | — | — | 250 Hz | — | — | ±20 % |
| Resonanzfrequenz in θX, belastet mit 2500 g | 190 Hz | — | — | 115 Hz | — | — | ±20 % |
| Resonanzfrequenz in θY, unbelastet | 530 Hz | — | — | 390 Hz | — | — | ±20 % |
| Resonanzfrequenz in θY, belastet mit 500 g | 370 Hz | — | — | 250 Hz | — | — | ±20 % |
| Resonanzfrequenz in θY, belastet mit 2500 g | 190 Hz | — | — | 115 Hz | — | — | ±20 % |
| Zulässige Druckkraft in Z | 50 N | 50 N | 50 N | 50 N | 50 N | 50 N | max. |
| Zulässige Zugkraft in Z | 40 N | 40 N | 40 N | 40 N | 40 N | 40 N | max. |
| Führung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | Festkörpergelenksführung mit Hebelübersetzung | |
| Gesamtmasse | 1400 g | 1400 g | 1400 g | 1420 g | 1420 g | 1420 g | |
| Material | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | |
| Anschlüsse und Umgebung | P-518.TCD | P-518.ZCD | P-518.ZCL | P-528.TCD | P-528.ZCD | P-528.ZCL | Toleranz |
| Betriebstemperaturbereich | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | |
| Anschluss | D-Sub 25W3 (m) | D-Sub 7W2 (m) | LEMO LVPZT | D-Sub 25W3 (m) | D-Sub 7W2 (m) | LEMO LVPZT | |
| Kabellänge | 1,5 m | 1,5 m | 1,5 m | 1,5 m | 1,5 m | 1,5 m | |
| Empfohlene Controller/Treiber | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 | E-503, E-505, E-610, E-621, E-625, E-713, E-727, E-754 |
Zulässige Druck-/Zugkraft in Z: Bei horizontaler Einbaulage (auf Oberfläche stehend, nicht hängend).
Elektrische Kapazität: Angabe pro Kanal (siehe Pinbelegung im Benutzerhandbuch).
Die Auflösung des Systems wird nur vom Rauschen des Verstärkers und der Messtechnik begrenzt, da PI-Piezo-Nanopositioniersysteme reibungsfrei arbeiten.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
Unpacking and Packing P-5xx Positioners
P-517, P-518, P-527, P-528, P-558 Präzise Piezo-Nanopositioniersysteme mit kapazitiven Sensoren
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Piezo-Hub- und Kipptisch; 100 µm Stellweg; 1 mrad × 1 mrad Rotationswinkel (θX × θY); Kapazitiv, indirekte Positionsmessung; D-Sub 25W3 (m); 1,5 m Kabellänge
Piezo-Hubtisch; 100 µm Stellweg; Kapazitiv, direkte Positionsmessung; D-Sub 7W2 (m); 1,5 m Kabellänge
Piezo-Hubtisch; 100 µm Stellweg; Kapazitiv, direkte Positionsmessung; LEMO LVPZT; 1,5 m Kabellänge
Piezo-Hub- und Kipptisch; 200 µm Stellweg; 2 mrad × 2 mrad Rotationswinkel (θX × θY); Kapazitiv, indirekte Positionsmessung; D-Sub 25W3 (m); 1,5 m Kabellänge
Piezo-Hubtisch; 200 µm Stellweg; Kapazitiv, direkte Positionsmessung; D-Sub 7W2 (m); 1,5 m Kabellänge
Piezo-Hubtisch; 200 µm Stellweg; Kapazitiv, direkte Positionsmessung; LEMO LVPZT; 1,5 m Kabellänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Hohe Zuverlässigkeit und überlegene Lebensdauer durch das patentierte Herstellungsverfahren für Multilayer-Aktoren.
Festkörpergelenksführungen von PI führen den Piezoaktor und dienen der geradlinigen Bewegung ohne Verkippung oder seitlichen Versatz.

Digitale Controller haben gegenüber analogen Verstärkerelektroniken Vorteile, die vor allem bei hochpräzisen Positionieraufgaben zum Tragen kommen.

Präzision und Reproduzierbarkeit sind undenkbar ohne Einsätze höchstauflösender Messverfahren. Hier bieten kapazitive Sensoren die besten Ergebnisse.
Der Vorteil eines Parallelkinematik-Mehrachsensystem ist, dass es kompakter gebaut werden kann, da nur es nur eine bewegte Plattform gibt.













