F-713.MA1 NEU!
Einseitiges Photonik-Alignmentsystem aus gestapelten XYZ-Linearpositionierern und NanoCube® Nanopositionierer; E-713 Digitalcontroller mit 4 Analogeingängen; Firmwareroutinen für extrem schnelle Alignmentaufgaben; Softwarepaket

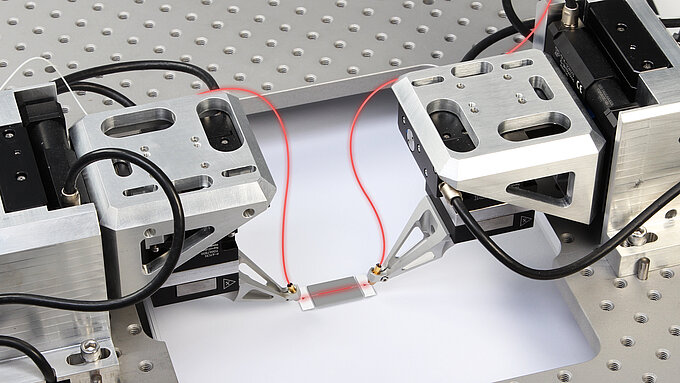
F-713.MA2 double-sided alignment system of stacked XYZ linear positioners and NanoCube® nano positioners
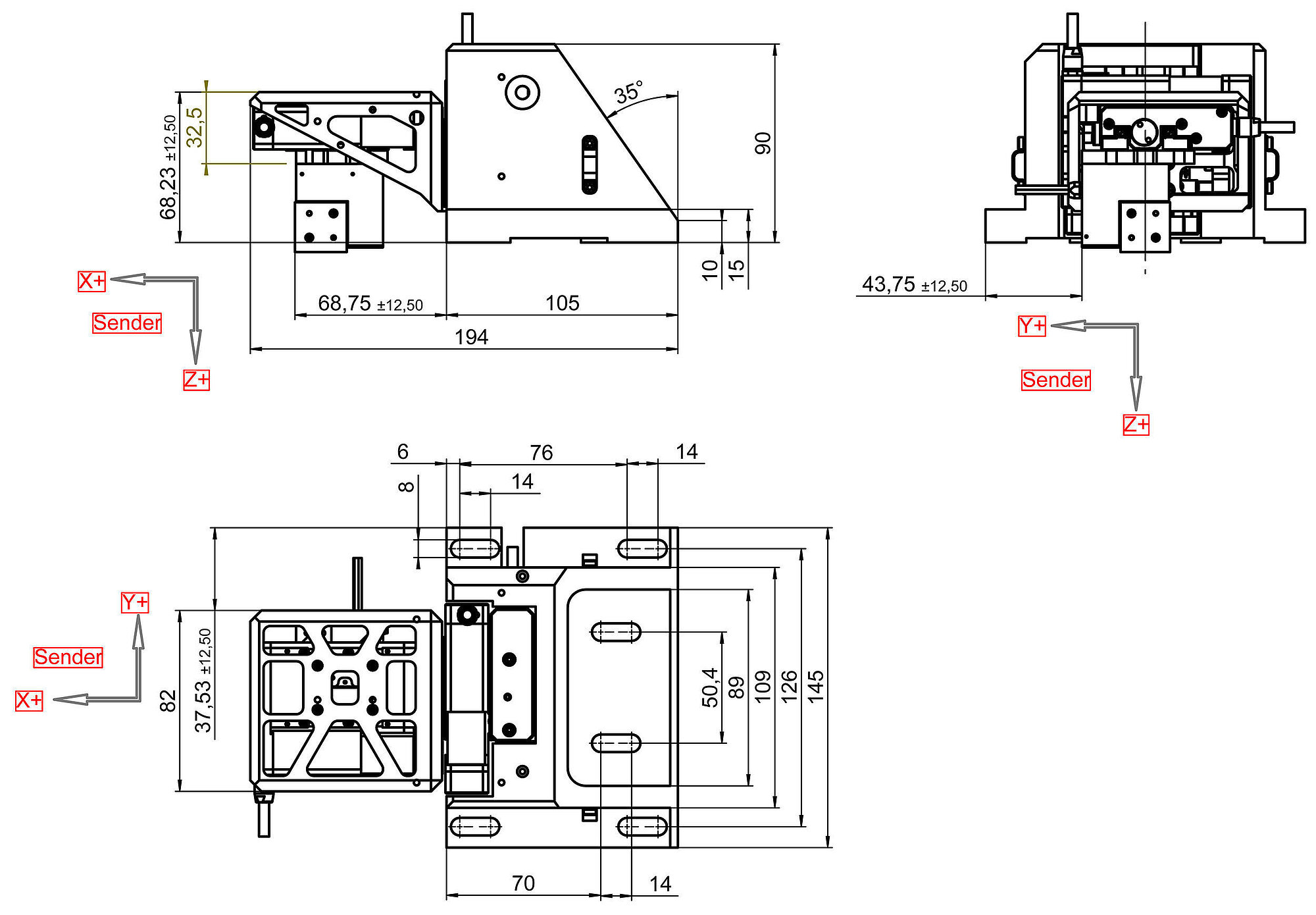
F-713.MA1, Abmessungen in mm

F-713.MA2, Abmessungen in mm

F-713.MA1 einseitiges Alignmentsystem aus gestapelten XYZ-Linearpositionierern und NanoCube® Nanopositionierer




Problemlösung
Die FMPA-Lösungen (Fast Multi-Channel Photonics Alignment) von PI kombinieren anwendungsoptimierte und sofort einsatzbereite, hochdynamische Ausrichtungsmechaniken mit ausgefeilten Controllern, auf denen die weltweit fortschrittlichsten und effektivsten Ausrichtungsalgorithmen zur First-Light-Suche sowie Profilierung und Leistungsoptimierung laufen.
Verringerung der Ausrichtungszeit um 99 %
Diese preisgekrönte Technologie zielt auf den größten Kostentreiber beim Testen und Verbinden in der Photonik ab: das für jedes Element und jeden Kanal erforderliche präzise Ausrichten. Ältere Ausrichtungsverfahren stammen aus den 1980er Jahren und können mehrere Minuten in Anspruch nehmen. Die schnellen optischen Ausrichtungslösungen von PI reduzieren den Zeitaufwand um 99 % und erledigen die Aufgabe in der Regel in weniger als einer Sekunde. Studien zeigen, dass bis zu 80 % der Kosten einer photonischen Komponente durch das Ausrichten verursacht werden – ohne FMPA. Daraus lässt sich leicht ableiten, wie sehr die Produktionswirtschaft von einer Reduzierung dieses 80-prozentigen Kostenanteils um 99 % profitiert. Und da davon auszugehen ist, dass die Nachfrage nach photonischen Strukturen in naher Zukunft um drei Größenordnungen steigen wird, da immer neue Anwendungen und Geräte auf den Markt kommen, nimmt FMPA eine Vorreiterrolle ein.
Kompakte Lösung für die Herausforderungen der Ausrichtung in XYZ
Diese kompakte Lösung integriert einen hochpräzisen XYZ-Tisch (basierend auf dem Modell M-122) für große Stellwege mit einem XYZ-Piezonanopositionierer (basierend auf dem Modell P-616), der eine außergewöhnliche Geschwindigkeit und Auflösung bietet. Ein einziger Controller steuert jeweils alle Achsen in einseitigen und doppelseitigen Konfigurationen: F-713.MA1 bzw. F-713.MA2. Vier hochauflösende Analogeingänge ermöglichen den Anschluss von Leistungsmessgeräten wie dem optischen Leistungsmesser F-712.PM1 von PI mit hoher Bandbreite zur Optimierung und Profilerstellung für eine effiziente und schnelle automatische Faserausrichtung. Zur Gewährleistung der Prozesssicherheit werden Verfahrbereichsgrenzen unterstützt. Ausgehend von diesen hochentwickelten Plattformen ist es einfach, weitere Ausrichtungslösungen mit beispielloser Geschwindigkeit zu konfigurieren, die zum Beispiel für die Wafer-Proximity-Automatisierung im Submikrometerbereich verwendet werden können.
Einsatzgebiete
PIC-Produktion; Ausrichtung in der Photonik; Ausrichtung optischer Komponenten und Linsen; Wafer-Probing in der Siliziumphotonik; Prüfungs-, Aufbau- und Verbindungslösungen für photonische Komponenten und Faseroptiken
| Bewegen und Positionieren | F-713.MA1 | F-713.MA2 | Toleranz |
|---|---|---|---|
| Anzahl aktiver Achsen | 6 | 12 | |
| Aktive Achsen, Grobpositionierung | X ǀ Y ǀ Z | X ǀ Y ǀ Z | |
| Stellweg in X, Grobpositionierung | 25 mm | 25 mm | |
| Stellweg in Y, Grobpositionierung | 25 mm | 25 mm | |
| Stellweg in Z, Grobpositionierung | 25 mm | 25 mm | |
| Kleinste Schrittweite in X, Grobpositionierung | 3 µm | 3 µm | |
| Kleinste Schrittweite in Y, Grobpositionierung | 3 µm | 3 µm | |
| Kleinste Schrittweite in Z, Grobpositionierung | 3 µm | 3 µm | |
| Maximale Geschwindigkeit in X, Grobpositionierung, unbelastet | 20 mm/s | 20 mm/s | |
| Maximale Geschwindigkeit in Y, Grobpositionierung, unbelastet | 20 mm/s | 20 mm/s | |
| Maximale Geschwindigkeit in Z, Grobpositionierung, unbelastet | 20 mm/s | 20 mm/s | |
| Antriebstyp, Grobpositionierung | DC-Motor | DC-Motor | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | |
| Sensortyp, Grobpositionierung | Rotationsencoder | Rotationsencoder | |
| Aktive Achsen, Feinpositionierung | X ǀ Y ǀ Z | X ǀ Y ǀ Z | |
| Stellweg in X, Feinpositionierung | 100 µm | 100 µm | |
| Stellweg in Y, Feinpositionierung | 100 µm | 100 µm | |
| Stellweg in Z, Feinpositionierung | 100 µm | 100 µm | |
| Kleinste Schrittweite in X, ungeregelt, Feinpositionierung | 0,3 nm | 0,3 nm | |
| Kleinste Schrittweite in Y, ungeregelt, Feinpositionierung | 0,3 nm | 0,3 nm | |
| Kleinste Schrittweite in Z, ungeregelt, Feinpositionierung | 0,3 nm | 0,3 nm | |
| Kleinste Schrittweite in X, geregelt, Feinpositionierung | 2,5 nm | 2,5 nm | |
| Kleinste Schrittweite in Y, geregelt, Feinpositionierung | 2,5 nm | 2,5 nm | |
| Kleinste Schrittweite in Z, geregelt, Feinpositionierung | 2,5 nm | 2,5 nm | |
| Linearitätsabweichung im nominalen Messbereich | 2 % | — | max. |
| Bidirektionale Wiederholgenauigkeit in X, 10 % Stellweg | 2 nm | 2 nm | typ. |
| Bidirektionale Wiederholgenauigkeit in Y, 10 % Stellweg | 2 nm | 2 nm | typ. |
| Bidirektionale Wiederholgenauigkeit in Z, 10 % Stellweg | 2 nm | 2 nm | typ. |
| Antriebstyp, Feinpositionierung | PICMA® | PICMA® | |
| Sensortyp Feinpositionierung | Inkrementeller Linearencoder | Inkrementeller Linearencoder | |
| Justage | F-713.MA1 | F-713.MA2 | Toleranz |
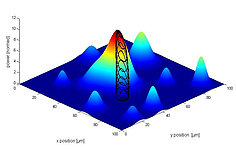
| Scanzeit spiralförmiger Flächenscan 10 μm Ø | < 0,2 s | < 0,5 s | typ. |
| Scanzeit spiralförmiger Flächenscan 100 μm Ø | < 0,3 s | < 1 s | typ. |
| Scanzeit spiralförmiger Flächenscan 500 μm Ø | < 3 s | < 6 s | typ. |
| Signaloptimierung mit Gradientensuche, randomisiert mit ±5 μm (Wiederholbarkeit < 0,01 dB) | 0,3 s | 0,3 s | |
| Anforderungen an den verwendeten Powermeter | F-713.MA1 | F-713.MA2 | Toleranz |
| Ausgangssignal | Analoger Ausgang, idealerweise gewandelt von linear zu logarithmisch | Analoger Ausgang, idealerweise gewandelt von linear zu logarithmisch | |
| Maximaler Ausgangsspannungsbereich | -5 bis 5 V | -5 bis 5 V | max. |
| Minimale Bandbreite | 1 kHz | 1 kHz | min. |
| Maximaler Rauschpegel | -60 dBm | -60 dBm | max. |
Hinweis zu Linearitätsabweichung: ohne polynomiale Linearisierung
Scanzeit: typische Zeitspanne, um den gesamten Bereich zu scannen und sich zur höchsten Intensität zu bewegen
Signaloptimierung mit Gradientensuche: Erreichen des globalen Maximums, nachdem First-Light gefunden wurde
Hinweis zu Betriebstemperaturbereich: Angabe gilt für Mechanik; Betriebstemperaturbereich Controller: 5 bis 40 °C
Sonderausführungen auf Anfrage
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
Schnelles optisches Ausrichten von Siliziumphotonik-Komponenten mit F-713 Alignment-Systemen und Hexapoden von PI. PILightning-Option für First-Light-Suche
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Einseitiges Photonik-Alignmentsystem aus gestapelten XYZ-Linearpositionierern und NanoCube® Nanopositionierer; E-713 Digitalcontroller mit 4 Analogeingängen; Firmwareroutinen für extrem schnelle Alignmentaufgaben; Softwarepaket
Doppelseitiges Photonik-Alignmentsystem aus gestapelten XYZ-Linearpositionierern und 2 NanoCube® Nanopositionierern; E-713 Digitalcontroller mit 4 Analogeingängen; Firmwareroutinen für extrem schnelle Alignmentaufgaben; Softwarepaket
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.
In vielen Anwendungsfeldern gibt es die Anforderung, Komponenten bis auf Nanometer genau auszurichten. Optische Komponenten wie z.B. die Linsen oder Linsenbaugruppen in kleinen Kameras, ebenso wie der CCD Chip selbst, müssen mit zunehmender Genauigkeit positioniert werden.

Hexapoden sind Systeme für die Bewegung und Positionierung von Lasten in sechs Freiheitsgraden – in drei translatorischen Achsen und drei rotatorischen Achsen.