Problemlösung
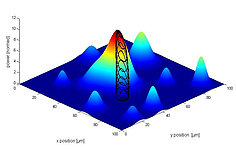
Die FMPA-Lösungen (Fast Multi-Channel Photonics Alignment) von PI kombinieren anwendungsoptimierte und sofort einsatzbereite, hochdynamische Ausrichtungsmechaniken mit ausgefeilten Controllern, auf denen die weltweit fortschrittlichsten und effektivsten Ausrichtungsalgorithmen zur First-Light-Suche sowie Profilierung und Leistungsoptimierung laufen.
Verringerung der Ausrichtungszeit um 99 %
Diese preisgekrönte Technologie zielt auf den größten Kostentreiber beim Testen und Verbinden in der Photonik ab: das für jedes Element und jeden Kanal erforderliche präzise Ausrichten. Ältere Ausrichtungsverfahren stammen aus den 1980er Jahren und können mehrere Minuten in Anspruch nehmen. Die schnellen optischen Ausrichtungslösungen von PI reduzieren den Zeitaufwand um 99 % und erledigen die Aufgabe in der Regel in weniger als einer Sekunde. Studien zeigen, dass bis zu 80 % der Kosten einer photonischen Komponente durch das Ausrichten verursacht werden – ohne FMPA. Daraus lässt sich leicht ableiten, wie sehr die Produktionswirtschaft von einer Reduzierung dieses 80-prozentigen Kostenanteils um 99 % profitiert. Angesichts der Prognosen, dass die Nachfrage nach photonischen Komponenten in naher Zukunft um drei Größenordnungen steigen wird, da neue Anwendungen und Komponenten entstehen, ist FMPA ein echter Wegbereiter.
Vielseitige, kompakte und bewährte Lösungen für die Herausforderungen der Ausrichtung in sechs Freiheitsgraden
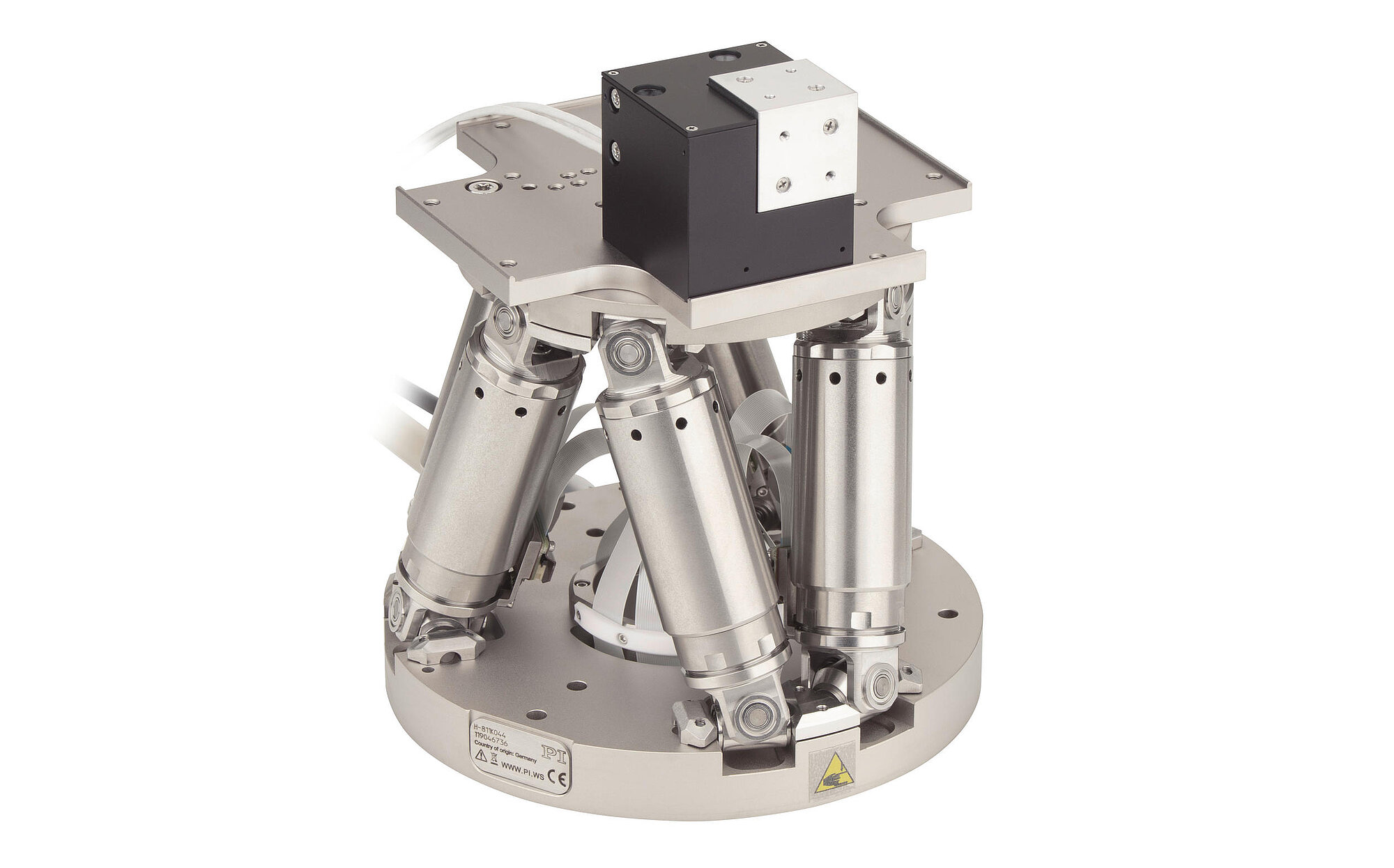
Für diese integrierten Lösungen werden kompakte Hexapoden von PI mit einem hochdynamischen, hochauflösenden NanoCube® Piezoscantisch kombiniert, um das Positionieren, Scannen und Optimieren in sechs Freiheitsgraden zu ermöglichen. Seit ihrer Einführung im Jahr 2016 haben diese einzigartigen mikrorobotischen Lösungen eine Vielzahl von Anwendungen ermöglicht, vom Testen von Siliziumphotonikwafern über die Arrayausrichtung bis hin zur automatisierten Montage photonischer Komponenten. Sie stellen die erste Wahl vieler führender OEMs und interner Integrationsteams dar. Die Anwendungen sind komplex, aber die Gründe für die Wahl sind einfach: die bahnbrechende Ausrichtungsgeschwindigkeit, die den Produktionsdurchsatz um zwei Größenordnungen steigert, der leicht zu beherrschende Befehlssatz kombiniert mit einer umfassenden Softwareunterstützung sowie globale Anwendungskompetenz und -unterstützung.
Synergien für höhere Leistung
Das koordinierte Zusammenspiel der Kombination aus Hexapod und NanoCube® ermöglicht die gleichzeitige Optimierung über mehrere Kanäle, Ein- und Ausgänge sowie Freiheitsgrade hinweg, parallel für alle Ein- und Ausgänge und in allen Freiheitsgraden. So ist der NanoCube® dank seiner Festkörpergelenkführungen und der PICMA-Piezoantriebe extrem schnell und langlebig, während der Hexapod große Stellwege inklusive Rotationen um X, Y und Z bietet und damit gerade auch die Ausrichtung von Wellenleiterarrays optimal unterstützt. Hochauflösende Analogeingänge ermöglichen den Anschluss von Leistungsmessgeräten, z. B. dem optischen Leistungsmesser F-712.PM1 von PI mit hoher Bandbreite, zur Optimierung und Datenerfassung für eine effiziente und schnelle automatisierte Ausrichtung faseroptischer Elemente. Zur Gewährleistung der Prozesssicherheit werden Verfahrbereichsgrenzen unterstützt.
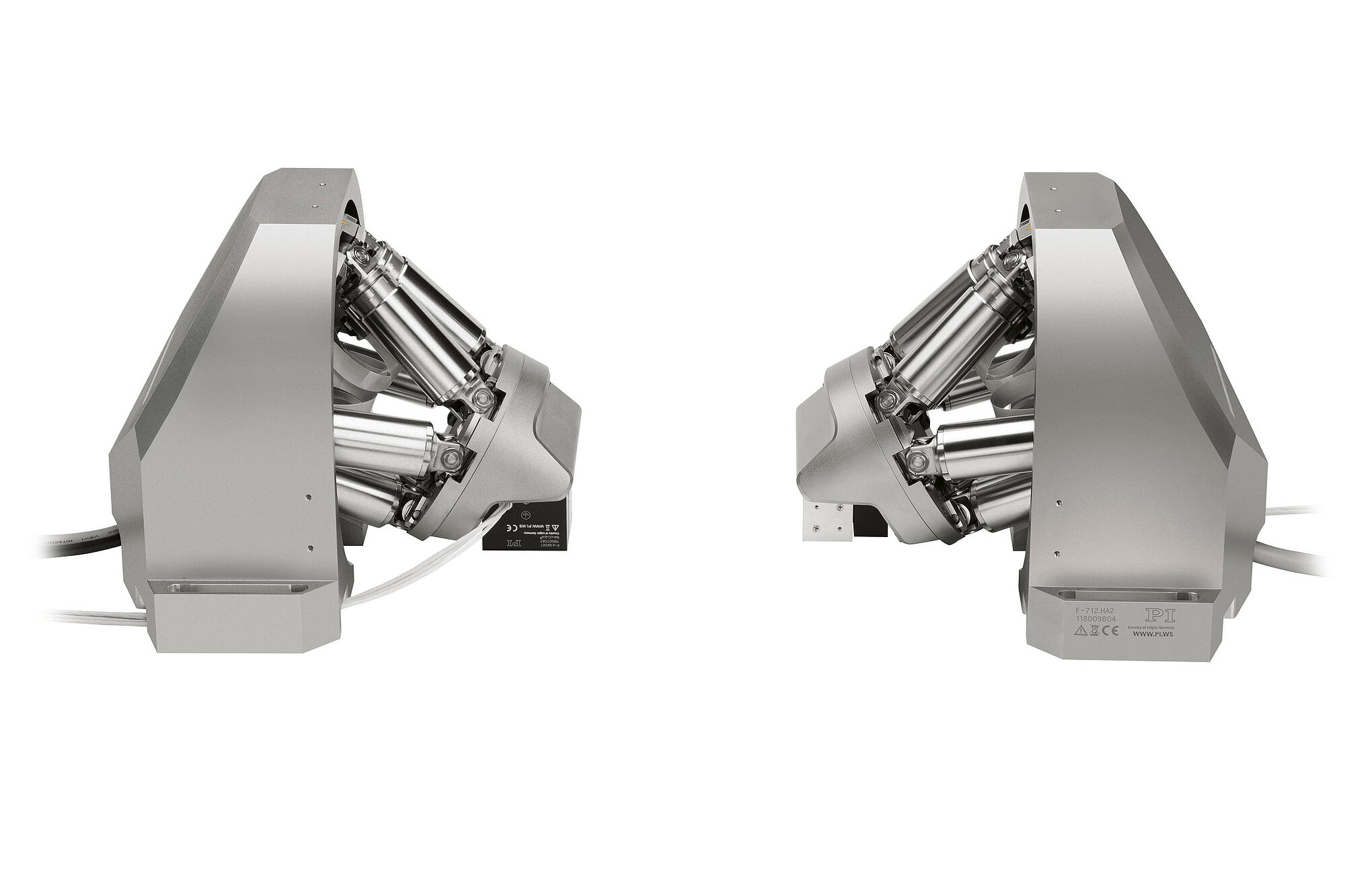
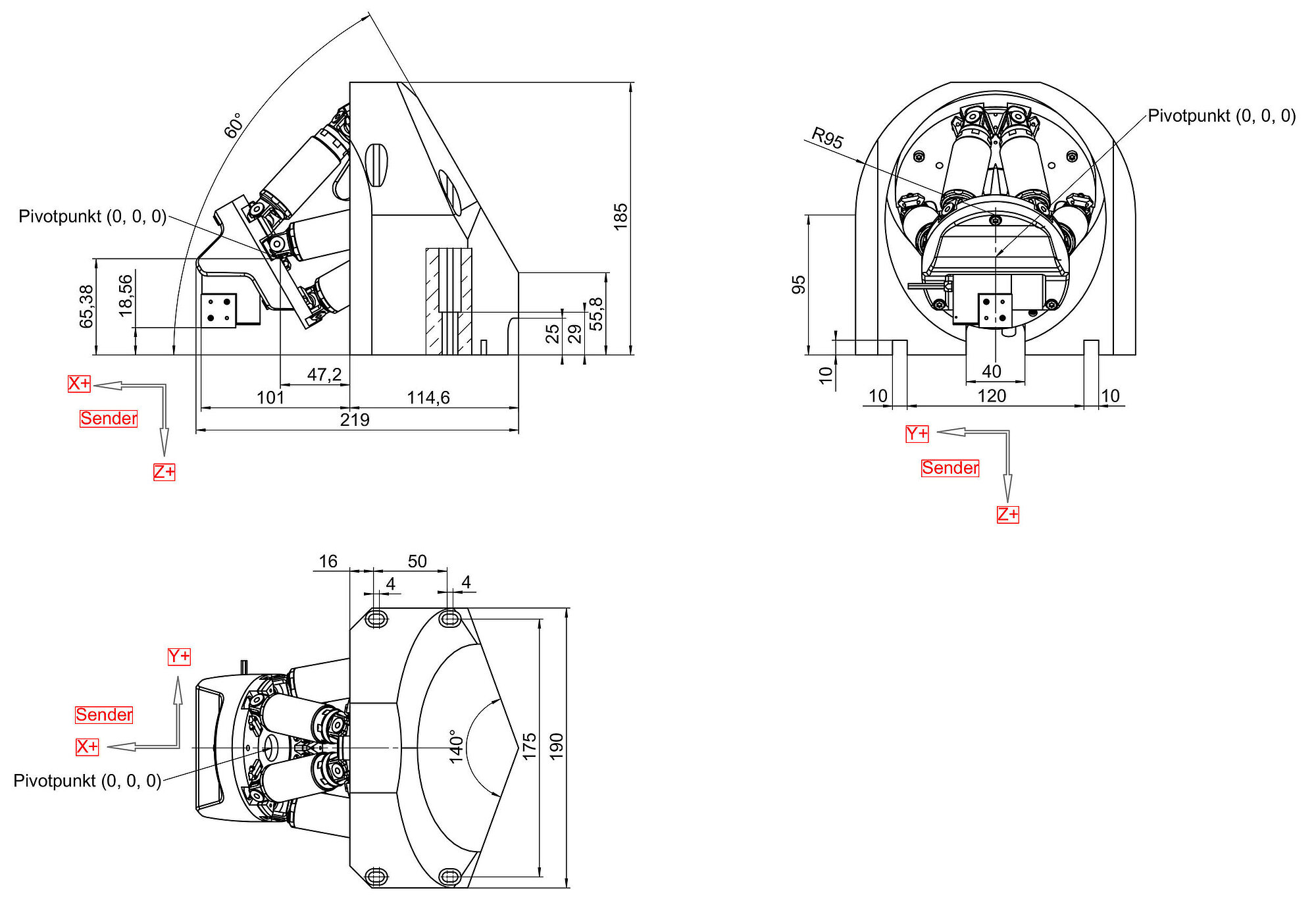
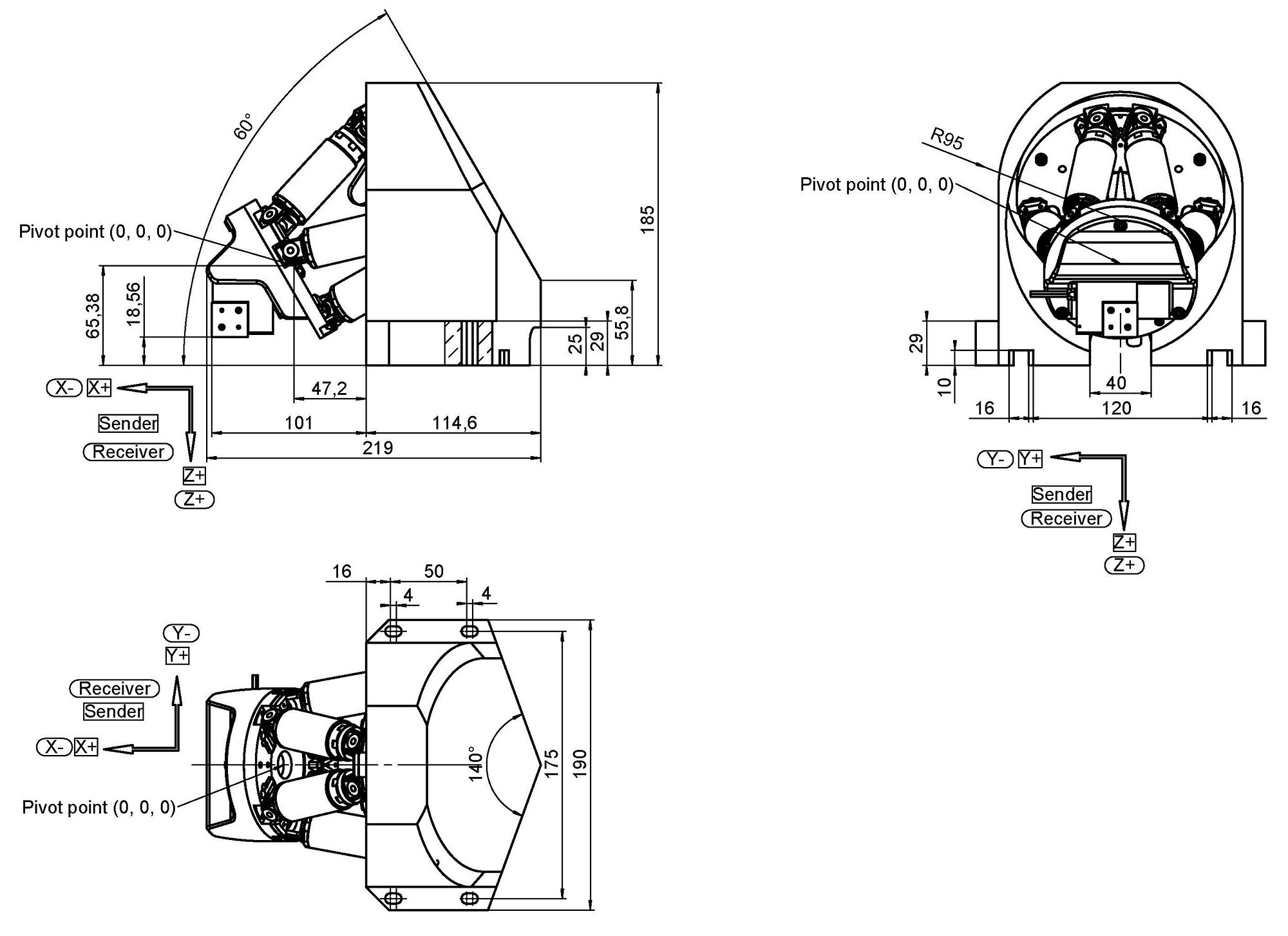
Flache und aufrechte Bauformen
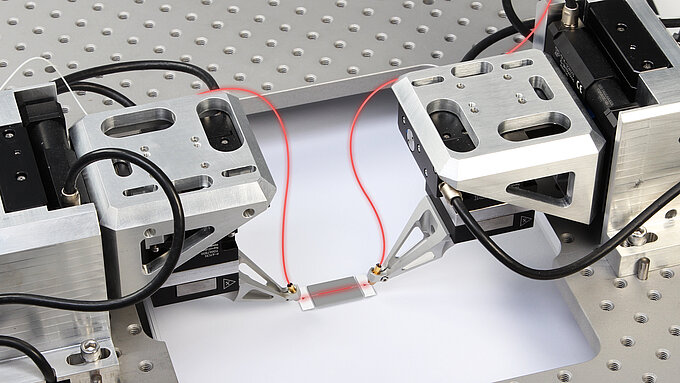
Zu den 6-DOF-Faserausrichtsystemen von PI gehören die Standardkonfigurationen F-713.HA1, F-713.HA2 und F-713.HU1.
Das einseitige System F-713.HA1 und das doppelseitige System F-713.HA2 weisen durch ihre gewinkelte Konfiguration eine flache Bauform auf. Durch die abgewinkelte Montage des Hexapods ist die Ausrichtung nahe (oder sogar unterhalb) der Montagefläche möglich. Damit sind die Systeme ideal für Wafer-Probing-Anwendungen in der Siliziumphotonik geeignet.
Das einseitige System F-713.HU1 ist in der aufrechten Konfiguration optimal für die Charakterisierung von Geräten und auch für Konfektionierungsprozesse geeignet. Darüber hinaus sind auch zwei- oder sogar mehrseitige Systeme in aufrechter Konfiguration auf Anfrage erhältlich.
Ausgehend von diesen hochentwickelten Plattformen ist es einfach, weitere Ausrichtungslösungen mit beispielloser Geschwindigkeit zu konfigurieren, die z. B. für die Wafer-Proximity-Automatisierung im Submikrometerbereich verwendet werden können.
Einsatzgebiete
PIC-Produktion; Ausrichtung von Faserarrays; Kollimatoren; optische Komponenten oder Linsen; Wafer-Probing in der Siliziumphotonik; Prüfungs-, Aufbau- und Verbindungslösungen für photonische Komponenten und Faseroptiken