V-522.1AA
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 5 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang in Bewegungsrichtung
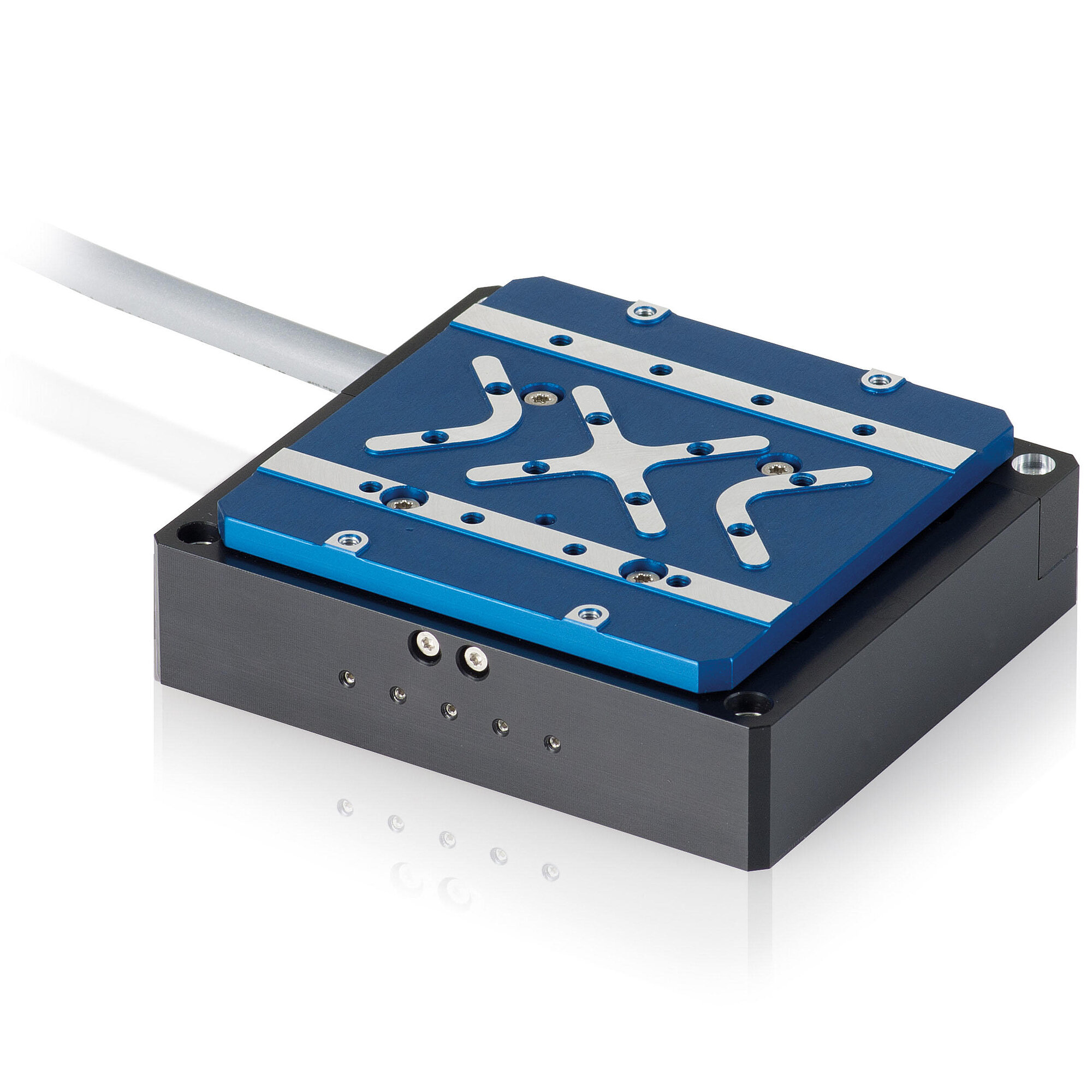








Lineartisch der Referenzklasse
Lineartische mit magnetischen Direktantrieben verzichten weitgehend auf mechanische Komponenten im Antriebsstrang, die Antriebskraft wirkt direkt auf die Bewegungsplattform. Zusammen mit den Präzisionslagern werden eine hohe Ablaufgenauigkeit und lange Lebensdauer erreicht. Die Lineartische eignen sich damit besonders gut für Scanning-Anwendungen.
PIMag® Voice-Coil-Motor
Voice-Coil-Motoren sind elektromagnetische Direktantriebe. Bei Direktantrieben wird die Kraft des Antriebselements ohne mechanische Übertragungselemente wie Kupplung, Spindel oder Getriebe direkt auf die zu bewegende Last übertragen. Voice-Coil-Antriebe bestehen aus einem Dauermagneten und einem Wicklungskörper, die sich im Luftspalt des Magnetfeldes befinden. Fließt ein Strom durch den Wicklungskörper, so bewegt sich der Wicklungskörper im Magnetfeld des Dauermagneten. Voice-Coil-Antriebe eignen sich durch ihr geringes Gewicht und das reibungsfreie Antriebsprinzip sehr gut für Anwendungen, die hohe Dynamik und hohe Geschwindigkeiten bei begrenzten Stellwegen erfordern. Hohe Scanfrequenzen und präzise Positionierung sind mit diesen Antrieben ebenfalls möglich, da sie frei von Hystereseeffekten sind.
PIMag®
PI entwickelt elektromagnetische Motoren auch selbst, wenn Positioniersysteme Leistungsmerkmale erreichen sollen, die mit am Markt verfügbaren Antriebskomponenten nicht möglich sind, z. B. um eine hohe Kraftdichte oder kompakte Bauweise zu erzielen. Die eigenentwickelten Motoren sind mit dem Markennamen PIMag® gekennzeichnet.
Kreuzrollenführung
Bei Kreuzrollenführungen wird der Punktkontakt der Kugeln in Kugelführungen durch den Linienkontakt gehärteter Rollen ersetzt. Sie sind dadurch wesentlich steifer und kommen mit geringerer Vorspannung aus, was die Reibung reduziert und einen gleichmäßigeren Lauf ermöglicht. Kreuzrollenführungen zeichnen sich darüber hinaus durch hohe Führungsgenauigkeit und Tragfähigkeit aus. Zwangsgesteuerte Wälzkörperkäfige verhindern Käfigwandern.
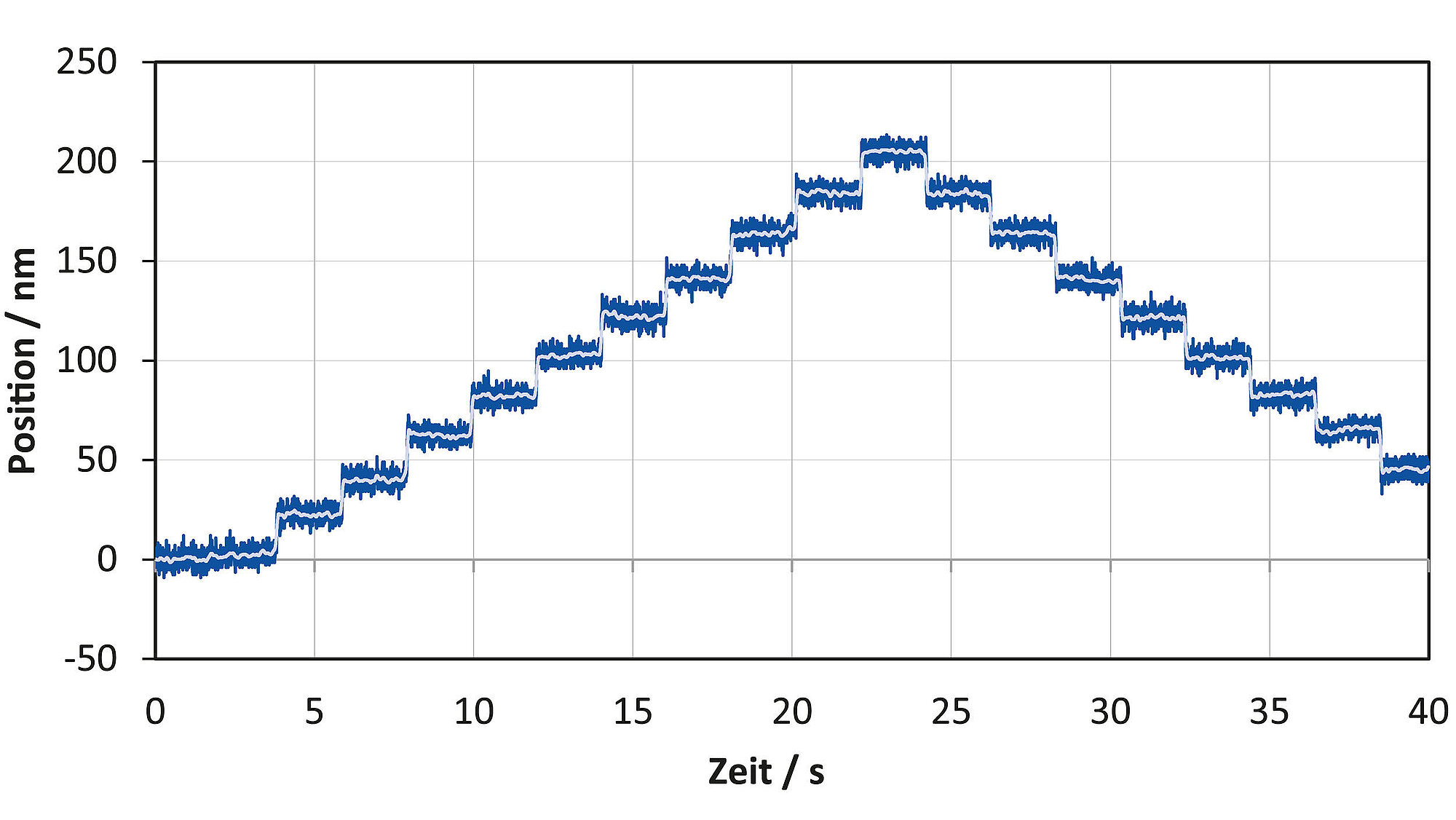
Hochgenaue Positionsmessung mit inkrementellem Linearencoder
Kontaktlose optische Linearencoder messen die Position mit höchster Genauigkeit direkt an der Plattform. Nichtlinearitäten, mechanisches Spiel oder elastische Deformation beeinflussen die Messung nicht.
Einsatzgebiete
Industrie und Forschung. Messtechnik. Photonik und Präzisionsscannen in der Halbleiter- oder Flachbildschirm-Herstellung.
| Bewegen | V-522.1AA | V-522.1AB | V-524.1AA | V-524.1AB | V-528.1AA | V-528.1AB | Toleranz |
|---|---|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | X | X | |
| Stellweg in X | 5 mm | 5 mm | 10 mm | 10 mm | 20 mm | 20 mm | |
| Maximale Geschwindigkeit in X, unbelastet | 250 mm/s | 250 mm/s | 250 mm/s | 250 mm/s | 250 mm/s | 250 mm/s | |
| Geradheit (Lineares Übersprechen in Y bei Bewegung in X) | ± 0,25 µm | ± 0,25 µm | ± 0,5 µm | ± 0,5 µm | ± 1,25 µm | ± 1,25 µm | typ. |
| Ebenheit (Lineares Übersprechen in Z bei Bewegung in X) | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,25 µm | ± 0,5 µm | ± 0,5 µm | typ. |
| Neigen (Rotatorisches Übersprechen in θY bei Bewegung in X) | ± 50 µrad | ± 50 µrad | ± 100 µrad | ± 100 µrad | ± 200 µrad | ± 200 µrad | typ. |
| Gieren (Rotatorisches Übersprechen in θZ bei Bewegung in X) | ± 50 µrad | ± 50 µrad | ± 100 µrad | ± 100 µrad | ± 200 µrad | ± 200 µrad | typ. |
| Positionieren | V-522.1AA | V-522.1AB | V-524.1AA | V-524.1AB | V-528.1AA | V-528.1AB | Toleranz |
| Kleinste Schrittweite in X | 0,02 µm | 0,02 µm | 0,02 µm | 0,02 µm | 0,02 µm | 0,02 µm | typ. |
| Bidirektionale Wiederholgenauigkeit in X | 0,24 µm | 0,24 µm | 0,24 µm | 0,24 µm | 0,24 µm | 0,24 µm | typ. |
| Referenzschalter | Optisch | Optisch | Optisch | Optisch | Optisch | Optisch | |
| Wiederholgenauigkeit des Referenzschalters | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | 1 µm | max. |
| Integrierter Sensor | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | |
| Sensorsignal | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | |
| Sensorauflösung | 10 nm | 10 nm | 10 nm | 10 nm | 10 nm | 10 nm | |
| Antriebseigenschaften | V-522.1AA | V-522.1AB | V-524.1AA | V-524.1AB | V-528.1AA | V-528.1AB | Toleranz |
| Antriebstyp | Voice-Coil | Voice-Coil | Voice-Coil | Voice-Coil | Voice-Coil | Voice-Coil | |
| Nennspannung | 24 V | 24 V | 24 V | 24 V | 24 V | 24 V | |
| Nennstrom, effektiv | 1 A | 1 A | 1 A | 1 A | 1 A | 1 A | typ. |
| Spitzenstrom, effektiv | 3 A | 3 A | 3 A | 3 A | 3 A | 3 A | typ. |
| Antriebskraft in X | 3,4 N | 3,4 N | 2,9 N | 2,9 N | 2,3 N | 2,3 N | typ. |
| Spitzenkraft in X | 10,2 N | 10,2 N | 8,7 N | 8,7 N | 6,9 N | 6,9 N | |
| Kraftkonstante | 3,4 N/A | 3,4 N/A | 2,9 N/A | 2,9 N/A | 2,3 N/A | 2,3 N/A | |
| Motorkonstante | 1,3 N/√W | 1,3 N/√W | 1,1 N/√W | 1,1 N/√W | 0,85 N/√W | 0,85 N/√W | typ. |
| Zeitkonstante | 0,32 ms | 0,32 ms | 0,32 ms | 0,32 ms | 0,32 ms | 0,32 ms | |
| Widerstand Phase-Phase | 7,2 Ω | 7,2 Ω | 7,2 Ω | 7,2 Ω | 7,2 Ω | 7,2 Ω | typ. |
| Induktivität Phase-Phase | 1,7 mH | 1,7 mH | 1,7 mH | 1,7 mH | 1,7 mH | 1,7 mH | |
| Gegen-EMK | 3,4 V·s/m | 3,4 V·s/m | 2,9 V·s/m | 2,9 V·s/m | 2,3 V·s/m | 2,3 V·s/m | max. |
| Maximal zulässige Temperatur von Antriebskomponenten | 75 °C | 75 °C | 75 °C | 75 °C | 75 °C | 75 °C | |
| Mechanische Eigenschaften | V-522.1AA | V-522.1AB | V-524.1AA | V-524.1AB | V-528.1AA | V-528.1AB | Toleranz |
| Zulässige Druckkraft in Z | 100 N | 100 N | 100 N | 100 N | 100 N | 100 N | max. |
| Bewegte Masse in X, unbelastet | 131 g | 131 g | 137 g | 137 g | 150 g | 150 g | |
| Führung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | Kreuzrollenführung | |
| Gesamtmasse | 460 g | 460 g | 500 g | 500 g | 580 g | 580 g | |
| Material | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | Aluminium | |
| Anschlüsse und Umgebung | V-522.1AA | V-522.1AB | V-524.1AA | V-524.1AB | V-528.1AA | V-528.1AB | Toleranz |
| Betriebstemperaturbereich | 18 bis 45 °C | 18 bis 45 °C | 18 bis 45 °C | 18 bis 45 °C | 18 bis 45 °C | 18 bis 45 °C | |
| Anschluss | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | D-Sub 15 (m) | |
| Kabellänge | 2 m | 2 m | 2 m | 2 m | 2 m | 2 m | |
| Kabelabgang | Kabelabgang in X | Kabelabgang in Y | Kabelabgang in X | Kabelabgang in Y | Kabelabgang in X | Kabelabgang in Y | |
| Empfohlene Controller / Treiber | C-413.2G(A), C-413.20(A) | C-413.2G(A), C-413.20(A) | C-413.2G(A), C-413.20(A) | C-413.2G(A), C-413.20(A) | C-413.2G(A), C-413.20(A) | C-413.2G(A), C-413.20(A) |
Hinweis zu Sensorauflösung: Mit C-413 Controller
Sonderausführungen auf Anfrage.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
V-522 / V-524 / V-528 PIMag® Voice Coil Lineartische für 5 mm / 10 mm / 20 mm Stellweg
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 5 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang in Bewegungsrichtung
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 5 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang orthogonal zur Bewegungsrichtung
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 10 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang in Bewegungsrichtung
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 10 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang orthogonal zur Bewegungsrichtung
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 20 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang in Bewegungsrichtung
PIMag® Voice-Coil-Lineartisch, Direktantrieb, Geschwindigkeit 250 mm/s, 20 mm Stellweg, direkte Positionsmessung mit inkrementellem Encoder, Kabelabgang orthogonal zur Bewegungsrichtung
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.





