P-611.20
XY-Nanopositionierer; 120 µm × 120 µm Stellweg (ungeregelt) (X × Y); LEMO-Stecker; 1,5 m Kabellänge


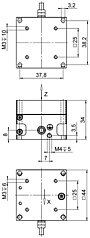
P-611.2S, Abmessungen in mm

P-611.XZS, Abmessungen in mm


Einsatzgebiete
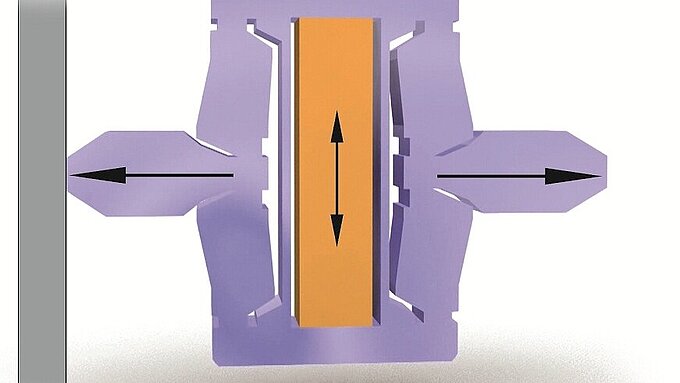
Überragende Lebensdauer dank PICMA® Piezoaktoren
Die PICMA® Piezoaktoren sind vollkeramisch isoliert. Dies schützt sie vor Luftfeuchtigkeit und Ausfällen durch erhöhten Leckstrom. PICMA® Aktoren bieten eine bis zu zehnmal höhere Lebensdauer als konventionelle polymerisolierte Aktoren. 100 Milliarden Zyklen ohne einen einzigen Ausfall sind erwiesen.
| Bewegen | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Toleranz |
|---|---|---|---|---|---|
| Aktive Achsen | X ǀ Y | X ǀ Y | X ǀ Z | X ǀ Z | |
| Stellweg in X, ungeregelt, bei -20 bis 120 V | 120 µm | 120 µm | 120 µm | 120 µm | +20 % / -0 % |
| Stellweg in Y, ungeregelt, bei -20 bis 120 V | 120 µm | 120 µm | — | — | +20 % / -0 % |
| Stellweg in Z, ungeregelt, bei -20 bis 120 V | — | — | 120 µm | 120 µm | +20 % / -0 % |
| Linearitätsabweichung | — | 0,1 % | — | 0,1 % | typ. |
| Winkelabweichung E_AY (Nicken) | ± 5 µrad | ± 5 µrad | ± 5 µrad | ± 5 µrad | typ. |
| Winkelabweichung E_BX (Nicken) | ± 5 µrad | ± 5 µrad | ± 5 µrad | ± 5 µrad | typ. |
| Winkelabweichung E_CX (Gieren) | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | typ. |
| Winkelabweichung E_CY (Gieren) | ± 10 µrad | ± 10 µrad | — | — | typ. |
| Stellweg in X | — | 100 µm | — | 100 µm | |
| Stellweg in Y | — | 100 µm | — | — | |
| Winkelabweichung E_AZ | — | — | ± 10 µrad | ± 10 µrad | typ. |
| Winkelabweichung E_BZ | — | — | ± 10 µrad | ± 10 µrad | typ. |
| Stellweg in Z | — | — | — | 100 µm | |
| Positionieren | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Toleranz |
| Unidirektionale Wiederholgenauigkeit in X | — | ± 10 nm | — | ± 10 nm | typ. |
| Unidirektionale Wiederholgenauigkeit in Y | — | ± 10 nm | — | — | typ. |
| Auflösung, ungeregelt | 0,2 nm | 0,2 nm | 0,2 nm | 0,2 nm | typ. |
| Integrierter Sensor | — | DMS, indirekte Positionsmessung | — | DMS, indirekte Positionsmessung | |
| Systemauflösung | — | 2 nm | — | 2 nm | typ. |
| Unidirektionale Wiederholgenauigkeit in Z | — | — | — | ± 10 nm | typ. |
| Antriebseigenschaften | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Toleranz |
| Antriebstyp | PICMA® | PICMA® | PICMA® | PICMA® | |
| Elektrische Kapazität | 1,5 µF | 1,5 µF | 1,5 µF | 1,5 µF | ±20 % |
| Mechanische Eigenschaften | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Toleranz |
| Steifigkeit in X | 0,2 N/µm | 0,2 N/µm | 0,2 N/µm | 0,2 N/µm | ±20 % |
| Steifigkeit in Y | 0,2 N/µm | 0,2 N/µm | — | — | ±20 % |
| Resonanzfrequenz in X, unbelastet | 345 Hz | 345 Hz | 365 Hz | 365 Hz | ±20 % |
| Resonanzfrequenz in X, belastet mit 30 g | 270 Hz | 270 Hz | 280 Hz | 280 Hz | ±20 % |
| Resonanzfrequenz in X, belastet mit 100 g | 180 Hz | 180 Hz | 185 Hz | 185 Hz | ±20 % |
| Resonanzfrequenz in Y, unbelastet | 270 Hz | 270 Hz | — | — | ±20 % |
| Resonanzfrequenz in Y, belastet mit 30 g | 225 Hz | 225 Hz | — | — | ±20 % |
| Resonanzfrequenz in Y, belastet mit 100 g | 165 Hz | 165 Hz | — | — | ±20 % |
| Zulässige Druckkraft in X | 15 N | 15 N | 15 N | 15 N | max. |
| Zulässige Druckkraft in Y | 15 N | 15 N | — | — | max. |
| Zulässige Druckkraft in Z | 15 N | 15 N | 15 N | 15 N | max. |
| Zulässige Zugkraft in X | 10 N | 10 N | 10 N | 10 N | max. |
| Zulässige Zugkraft in Y | 10 N | 10 N | — | — | max. |
| Gesamtmasse | 235 g | 235 g | 270 g | 270 g | ±5 % |
| Material | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | Aluminium, Stahl | |
| Steifigkeit in Z | — | — | 0,35 N/µm | 0,35 N/µm | ±20 % |
| Resonanzfrequenz in Z, unbelastet | — | — | 340 Hz | 340 Hz | ±20 % |
| Resonanzfrequenz in Z, belastet mit 30 g | — | — | 295 Hz | 295 Hz | ±20 % |
| Resonanzfrequenz in Z, belastet mit 100 g | — | — | 230 Hz | 230 Hz | ±20 % |
| Zulässige Zugkraft in Z | — | — | 10 N | 10 N | max. |
| Anschlüsse und Umgebung | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Toleranz |
| Betriebstemperaturbereich | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | -20 bis 80 °C | |
| Anschluss | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | |
| Kabellänge | 1,5 m | 1,5 m | 1,5 m | 1,5 m | ±10 mm |
| Empfohlene Controller/Treiber | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | |
| Sensoranschluss | — | LEMO FFA.0S.304.CLAC32 | — | LEMO FFA.0S.304.CLAC32 |
Die Auflösung des Systems wird nur vom Rauschen des Verstärkers und der Messtechnik begrenzt, da PI-Piezo-Nanopositioniersysteme reibungsfrei arbeiten.
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
P-611 Nanopositioniersysteme mit DMS-Sensor / ohne Sensor
Auspacken und Handhabung von P-611 Positionierern
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
XY-Nanopositionierer; 120 µm × 120 µm Stellweg (ungeregelt) (X × Y); LEMO-Stecker; 1,5 m Kabellänge
XY-Nanopositionierer; 100 µm × 100 µm Stellweg (X × Y); DMS, indirekte Positionsmessung; LEMO-Stecker; 1,5 m Kabellänge
XZ-Nanopositionierer; 120 µm × 120 µm Stellweg (ungeregelt) (X × Z); LEMO-Stecker; 1,5 m Kabellänge
XZ-Nanopositionierer; 100 µm × 100 µm Stellweg (X × Z); DMS, indirekte Positionsmessung; LEMO-Stecker; 1,5 m Kabellänge
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.