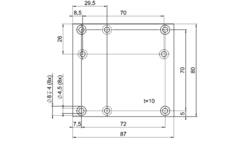
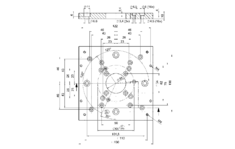
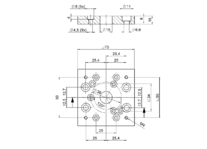
M-414.1PD
Präziser Hochlast-Lineartisch; DC-Motor mit ActiveDrive; 100 mm Stellweg; 500 N Belastbarkeit; 100 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 4000 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422