Für den Test der elektronischen Videostabilisierung eines Pixel-Smartphones nutzte Google beispielsweise einen Hexapod. Mit dem sechsachsigen parallelkinematischen System simuliert Google Vibrationen, die bei der Aufnahme von Videos entstehen können und durch Algorithmen zuverlässig korrigiert werden sollen. Software Ingenieure bewegen dabei den Hexapod inklusive Smartphone gemäß einer definierten Prüftrajektorie mit einer Frequenz, die dem Zittern der menschlichen Hand entspricht.
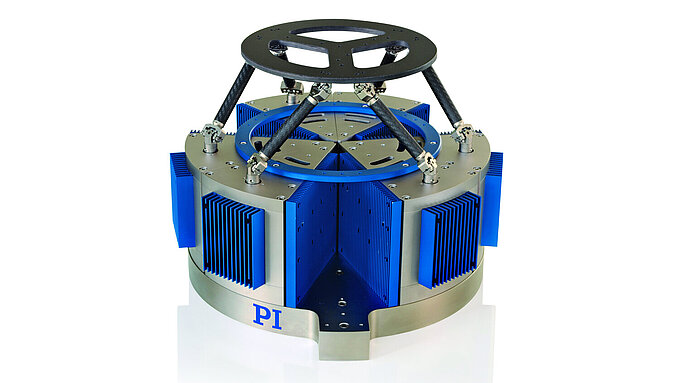
Da das Smartphone für Aufnahmen oft am langen Arm oder mit spitzen Fingern gehalten wird, muss die bewegte Plattform das Smartphone in mehreren Achsen „schütteln“. Gleichzeitig ist eine hohe Wiederholgenauigkeit der Bewegung gefordert, um zuverlässige Ergebnisse zu gewährleisten. Beim Test des Google Pixel 2 übernimmt diese Aufgabe ein Hexapod mit Voice-Coil Antrieben.
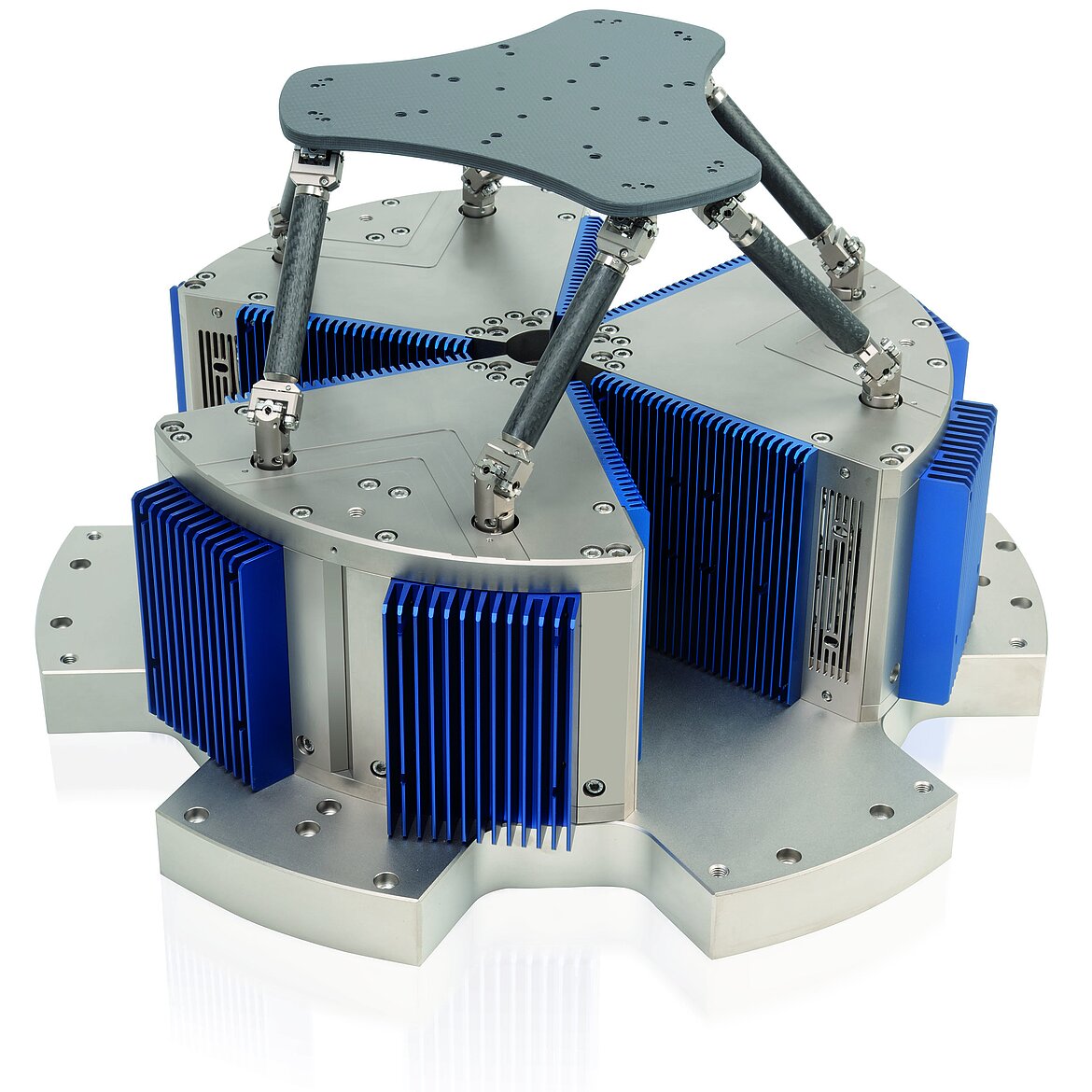
Mit dem Hexapod H-860 sind Simulationsfrequenzen von bis 30 Hz und Wiederholgenauigkeiten von ±0,5 µm in X,Y, Z und bis zu ±9 µrad in den rotatorischen Achsen möglich. Der Hexapod fährt vordefinierte Trajektorien, Sinuskurven und frei definierbare Bahnen mit hoher Bahntreue ab. Aufgrund der Leichtbauweise aus hochsteifen Carbon-Frästeilen mit geringen bewegten Massen lassen sich schnelle und präzise Bewegungen und hohe Beschleunigungen realisieren.
Parallelkinematischer Aufbau mit sechs Freiheitsgraden

Bewegungen in mehreren Achsen können mithilfe seriellkinematischer, also gestapelter Systeme, oder parallelkinematischer Aufbauten erreicht werden. In einem seriellkinematischen Mehrachsensystem ist jeder Aktor genau einem Bewegungsfreiheitsgrad zugeordnet. Werden Positionssensoren integriert, sind diese ebenfalls jeweils einem Antrieb zugeordnet und messen nur die Bewegung in dem Freiheitsgrad der entsprechenden Stellachse. Alle unerwünschten Bewegungen in den anderen fünf Freiheitsgraden, die zum Beispiel durch Führungsfehler der einzelnen Achsen entstehen, können nicht erkannt und ausgeregelt werden. Bei Hexapoden wirken alle sechs Aktoren unmittelbar auf die gleiche Plattform. So können sich keine Führungsfehler addieren.
Zu der erheblich präziseren Bewegung kommen weitere Vorteile wie die geringere bewegte Masse, da nur die Plattform bewegt wird und nicht die Positioniersysteme für andere Achsen. Daraus ergibt sich eine höhere Dynamik, eine deutlich bessere Bahntreue und Wiederhol- und Ablaufgenauigkeit für alle Bewegungsachsen. Weil es keine geschleppten Kabel gibt, ist die Präzision nicht durch Reibung oder Momente eingeschränkt.

Eine wesentliche Eigenschaft der Hexapoden ist der frei definierbare Rotations- oder Pivotpunkt. Damit kann die Bewegung der Hexapod-Plattform gezielt auf die Lage der Kamera abgestimmt werden.
Bildstabilisierung im Test
Soll die Qualität der Bildstabilisierung geprüft werden, setzen beispielsweise Drohnenhersteller Hexapoden ein, um die Flugbewegung der Drohne zu simulieren und so die Qualität der Kameraaufnahmen zu testen.
Diese Aufgabe kann ein CIPA-zertifizierter Hexapod mit bürstenlosen DC- Motoren übernehmen.