V-857.566023E0
Hochgeschwindigkeits-Lineartisch; Eisenloser 3-Phasen-Linearmotor; 400 mm Stellweg; 1000 N Belastbarkeit; 5000 mm/s maximale Geschwindigkeit; Absoluter Linearencoder, 5 nm Sensorauflösung, BiSS-C, 32-Bit
V-857.576211E0
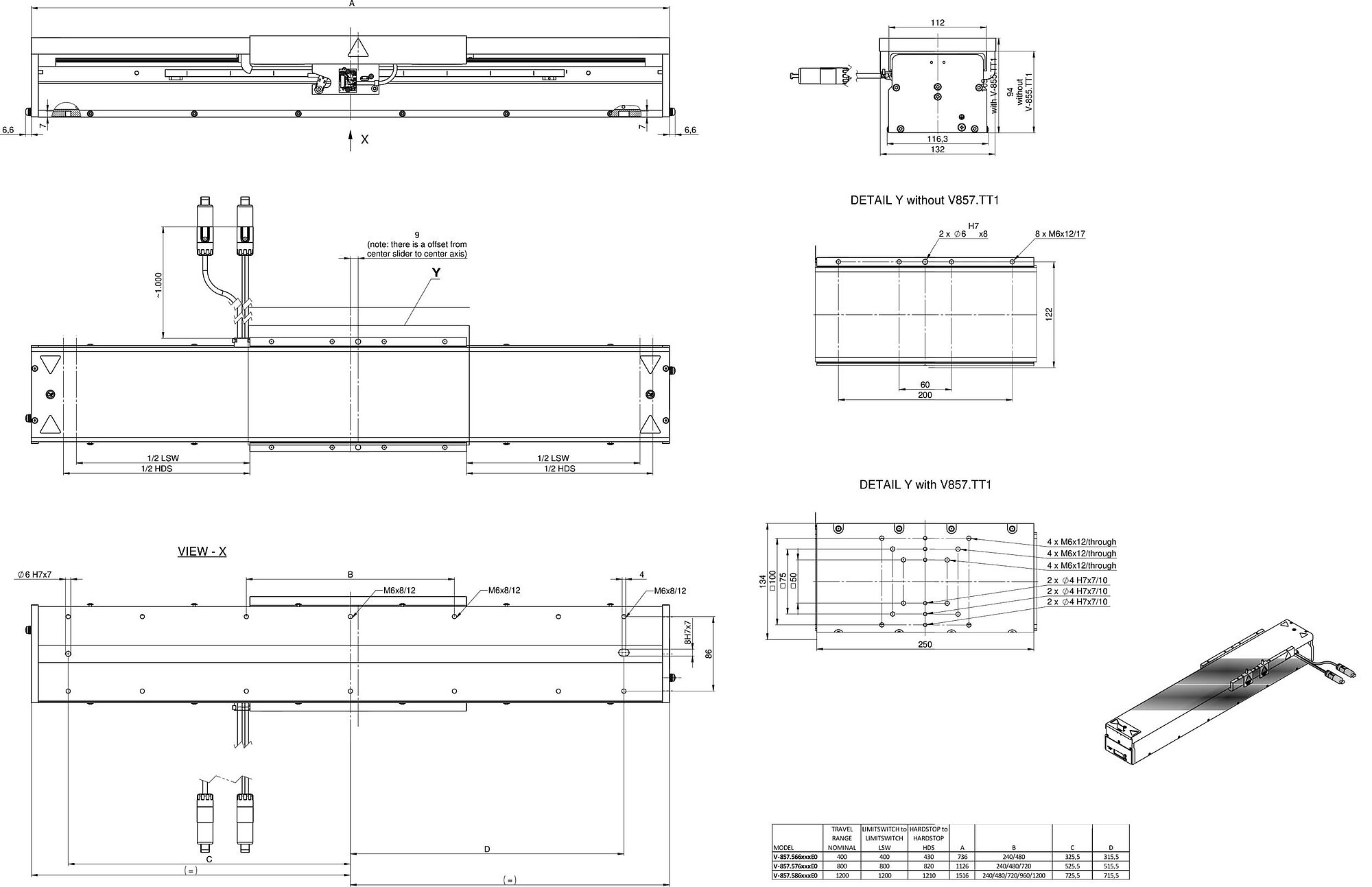
V-857, Abmessungen in mm


Industriedesign für hohe Leistung und hohe Last
Der V-857 ist ein hochbelastbarer und hochdynamischer Lineartisch für industrielle Anwendungen. Das Design ist konsequent auf anspruchsvolle Industriebedingungen ausgerichtet und zeichnet sich durch hohe Steifigkeit und den Einsatz hochwertiger Komponenten aus: Kugelumlaufführungen, 3-Phasen-Linearmotor, inkrementeller oder absoluter Linearencoder. Mit ihrer hohen Auflösung ermöglichen die Encoder eine hervorragende Bahntreue, kleine Folgefehler und kurze Einschwingzeiten. Industrietaugliche Stecker bieten ein schnelle und sichere Anschlussmöglichkeit. Die optionale Bewegungsplattform erlaubt vielseitige Montagemöglichkeiten mit einem dreifachen M6-Bohrraster.
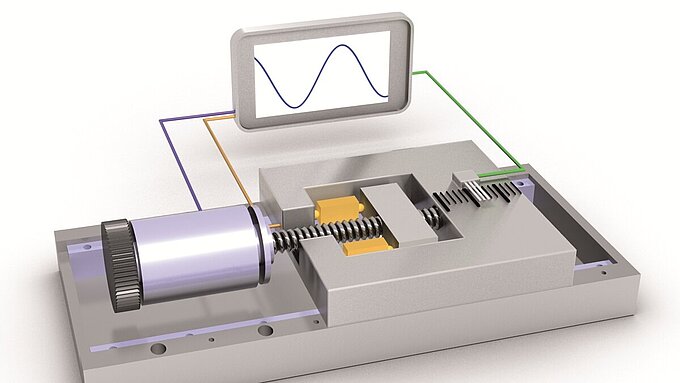
Linearmotor mit Direktantrieb
3-phasige magnetische Direktantriebe verzichten auf mechanische Bauteile im Antriebsstrang, sie übertragen die Antriebskraft direkt und reibungsfrei auf die Bewegungsplattform. Die Antriebe erreichen hohe Geschwindigkeiten und Beschleunigungen. Eisenlose Motoren eignen sich besonders für Positionieraufgaben mit höchsten Ansprüchen an Präzision, da es keine unerwünschten Wechselwirkungen mit den Permanentmagneten gibt. Dies ermöglicht einen gleichmäßigen Lauf auch bei niedrigsten Geschwindigkeiten, gleichzeitig treten keine Vibrationen bei hohen Geschwindigkeiten auf. Nichtlinearitäten im Regelverhalten werden vermieden und jede beliebige Position kann einfach geregelt werden. Die Antriebskraft ist frei einstellbar.
Optionen
Optionales Zubehör: Bewegungsplattform V-857.TT1
Einsatzgebiete
| Bewegen | V-857.566023E0 | V-857.576023E0 | V-857.566211E0 | V-857.576211E0 | Toleranz |
|---|---|---|---|---|---|
| Aktive Achsen | X | X | X | X | |
| Stellweg in X | 400 mm | 800 mm | 400 mm | 800 mm | |
| Beschleunigung in X, unbelastet | 50 m/s² | 50 m/s² | 50 m/s² | 50 m/s² | max. |
| Maximale Geschwindigkeit in X, unbelastet | 5000 mm/s | 5000 mm/s | 5000 mm/s | 5000 mm/s | |
| Geradheitsabweichung in Y (Geradheit) | ± 12 µm | ± 20 µm | ± 12 µm | ± 20 µm | max. |
| Geradheitsabweichung in Z (Ebenheit) | ± 10 µm | ± 10 µm | ± 10 µm | ± 10 µm | max. |
| Winkelabweichung um Y (Nicken) | ± 100 µrad | ± 150 µrad | ± 100 µrad | ± 150 µrad | max. |
| Winkelabweichung um Z (Gieren) | ± 150 µrad | ± 200 µrad | ± 150 µrad | ± 200 µrad | max. |
| Positionieren | V-857.566023E0 | V-857.576023E0 | V-857.566211E0 | V-857.576211E0 | Toleranz |
| Kleinste Schrittweite in X | 0,1 µm | 0,1 µm | 0,1 µm | 0,1 µm | max. |
| Positioniergenauigkeit in X, unkalibriert | ± 15 µm | ± 20 µm | ± 15 µm | ± 20 µm | max. |
| Bidirektionale Wiederholgenauigkeit in X | 1 µm | 1 µm | 1 µm | 1 µm | max. |
| Endschalter | — | — | Hall-Effekt, Öffner, 5 V, NPN | Hall-Effekt, Öffner, 5 V, NPN | |
| Integrierter Sensor | Absoluter Linearencoder | Absoluter Linearencoder | Inkrementeller Linearencoder | Inkrementeller Linearencoder | |
| Sensorsignal | BiSS-C | BiSS-C | Sin/Cos, 1 V Spitze-Spitze | Sin/Cos, 1 V Spitze-Spitze | |
| Sensorsignalperiode | — | — | 20 µm | 20 µm | |
| Systemauflösung in X | 1 nm | 1 nm | 0,3 nm | 0,3 nm | |
| Sensorauflösung | 5 nm | 5 nm | — | — | |
| Antriebseigenschaften | V-857.566023E0 | V-857.576023E0 | V-857.566211E0 | V-857.576211E0 | Toleranz |
| Antriebstyp | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | Eisenloser 3-Phasen-Linearmotor | |
| Nennspannung | 320 V | 320 V | 320 V | 320 V | |
| Spitzenspannung | 320 V | 320 V | 320 V | 320 V | |
| Nennstrom, effektiv | 6 A | 6 A | 6 A | 6 A | typ. |
| Spitzenstrom, effektiv | 21 A | 21 A | 21 A | 21 A | typ. |
| Antriebskraft in X | 120 N | 120 N | 120 N | 120 N | typ. |
| Spitzenkraft in X | 420 N | 420 N | 420 N | 420 N | |
| Kraftkonstante | 20 N/A | 20 N/A | 20 N/A | 20 N/A | |
| Motorkonstante | 9,7 N/√W | 9,7 N/√W | 9,7 N/√W | 9,7 N/√W | typ. |
| Zeitkonstante | 0,35 ms | 0,35 ms | 0,35 ms | 0,35 ms | |
| Widerstand Phase-Phase | 2,8 Ω | 2,8 Ω | 2,8 Ω | 2,8 Ω | typ. |
| Induktivität Phase-Phase | 1 mH | 1 mH | 1 mH | 1 mH | |
| Gegen-EMK Phase-Phase | 16 V·s/m | 16 V·s/m | 16 V·s/m | 16 V·s/m | max. |
| Polteilung N-N | 30 mm | 30 mm | 30 mm | 30 mm | |
| Mechanische Eigenschaften | V-857.566023E0 | V-857.576023E0 | V-857.566211E0 | V-857.576211E0 | Toleranz |
| Zulässige Druckkraft in Y | 100 N | 100 N | 100 N | 100 N | max. |
| Zulässige Druckkraft in Z | 1000 N | 1000 N | 1000 N | 1000 N | max. |
| Bewegte Masse in X, unbelastet | 2300 g | 2300 g | 2300 g | 2300 g | |
| Führung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | Kugelumlaufführung | |
| Gesamtmasse | 11600 g | 16600 g | 11600 g | 16600 g | |
| Material | Aluminium, schwarz eloxiert; Stahl (Führungsschiene) | Aluminium, schwarz eloxiert; Stahl (Führungsschiene) | Aluminium, schwarz eloxiert; Stahl (Führungsschiene) | Aluminium, schwarz eloxiert; Stahl (Führungsschiene) | |
| Anschlüsse und Umgebung | V-857.566023E0 | V-857.576023E0 | V-857.566211E0 | V-857.576211E0 | Toleranz |
| Betriebstemperaturbereich | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | 5 bis 40 °C | |
| Anschluss | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | M15 9-polig (m) | |
| Sensoranschluss | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | M15 15-polig (m) | |
| Kabellänge | 1 m | 1 m | 1 m | 1 m | |
| Empfohlene Controller / Treiber | Sofort einsatzbereit, mit vollintegriertem Controller der Serie G-901: G-901.R519, G-901.R5199, G-901.R4199. Flexible Integration mit kompakten Modulen: ACS SPiiPlusEC und UDMpa. Auch mit anderen 3rd-Party-Controllern und Servo-Treibern kompatibel. | Sofort einsatzbereit, mit vollintegriertem Controller der Serie G-901: G-901.R519, G-901.R5199, G-901.R4199. Flexible Integration mit kompakten Modulen: ACS SPiiPlusEC und UDMpa. Auch mit anderen 3rd-Party-Controllern und Servo-Treibern kompatibel. | Sofort einsatzbereit, mit vollintegriertem Controller der Serie G-901: G-901.R519, G-901.R5199, G-901.R4199. Flexible Integration mit kompakten Modulen: ACS SPiiPlusEC und UDMpa. Auch mit anderen 3rd-Party-Controllern und Servo-Treibern kompatibel. | Sofort einsatzbereit, mit vollintegriertem Controller der Serie G-901: G-901.R519, G-901.R5199, G-901.R4199. Flexible Integration mit kompakten Modulen: ACS SPiiPlusEC und UDMpa. Auch mit anderen 3rd-Party-Controllern und Servo-Treibern kompatibel. |
Technische Daten werden bei PI bei 22 ±3 °C spezifiziert. Die angegebenen Werte gelten im unbelasteten Zustand, wenn nicht anders angegeben. Teilweise sind Eigenschaften voneinander abhängig. Die Angabe "typ." kennzeichnet einen statistischen Mittelwert für eine Eigenschaft; sie gibt keinen garantierten Wert für jedes ausgelieferte Produkt an. Bei der Ausgangsprüfung eines Produkts werden nicht alle, sondern nur ausgewählte Eigenschaften geprüft. Beachten Sie, dass sich einige Produkteigenschaften mit zunehmender Betriebsdauer verschlechtern können.
V-857.5x6023E0 Hochgeschwindigkeits-Lineartisch
V-857.5x6211E0 Hochgeschwindigkeits-Lineartisch
Fordern Sie ein unverbindliches Angebot über gewünschte Stückzahlen, Preise und Lieferzeiten an oder beschreiben Sie Ihre gewünschte Modifikation.
Hochgeschwindigkeits-Lineartisch; Eisenloser 3-Phasen-Linearmotor; 400 mm Stellweg; 1000 N Belastbarkeit; 5000 mm/s maximale Geschwindigkeit; Absoluter Linearencoder, 5 nm Sensorauflösung, BiSS-C, 32-Bit
Hochgeschwindigkeits-Lineartisch; Eisenloser 3-Phasen-Linearmotor; 800 mm Stellweg; 1000 N Belastbarkeit; 5000 mm/s maximale Geschwindigkeit; Absoluter Linearencoder, 5 nm Sensorauflösung, BiSS-C, 32-Bit
Hochgeschwindigkeits-Lineartisch; Eisenloser 3-Phasen-Linearmotor; 400 mm Stellweg; 1000 N Belastbarkeit; 5000 mm/s maximale Geschwindigkeit; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Hochgeschwindigkeits-Lineartisch; Eisenloser 3-Phasen-Linearmotor; 800 mm Stellweg; 1000 N Belastbarkeit; 5000 mm/s maximale Geschwindigkeit; Inkrementeller Linearencoder, 20 µm Sensorsignalperiode, Sin/Cos, 1 V Spitze-Spitze
Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.

Drehende Elektromotoren wie DC- oder Schrittmotoren werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt. Dabei sind Schrittmotorlösungen mit hochauflösenden Encodern in der Lage, kleinste Schrittweiten von 10 Nanometern zuverlässig und wiederholbar auszuführen.
Beim Hybridkonzept von PI werden DC-Servomotor (Vorteil: große Stellwege) und Piezoantrieb (Vorteil: Nanometer-Genauigkeit) kombiniert.

Inspektions- und Fertigungssysteme der Halbleiterindustrie: mechanische Präzisionsführungen oder Luftlagertechnik mit magnetischen Linearmotoren.

Magnetische Direktantriebe bieten vor allem hinsichtlich Verschleiß und Dynamik Vorteile gegenüber klassischen spindelbasierten Lösungen.

Die drehenden Elektromotoren, wie zum Beispiel DC- oder Schrittmotoren, werden in Verbindung mit Spindel- oder Schneckenantrieb eingesetzt.


