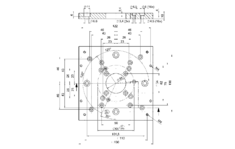
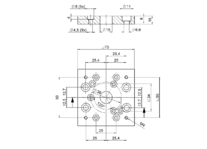
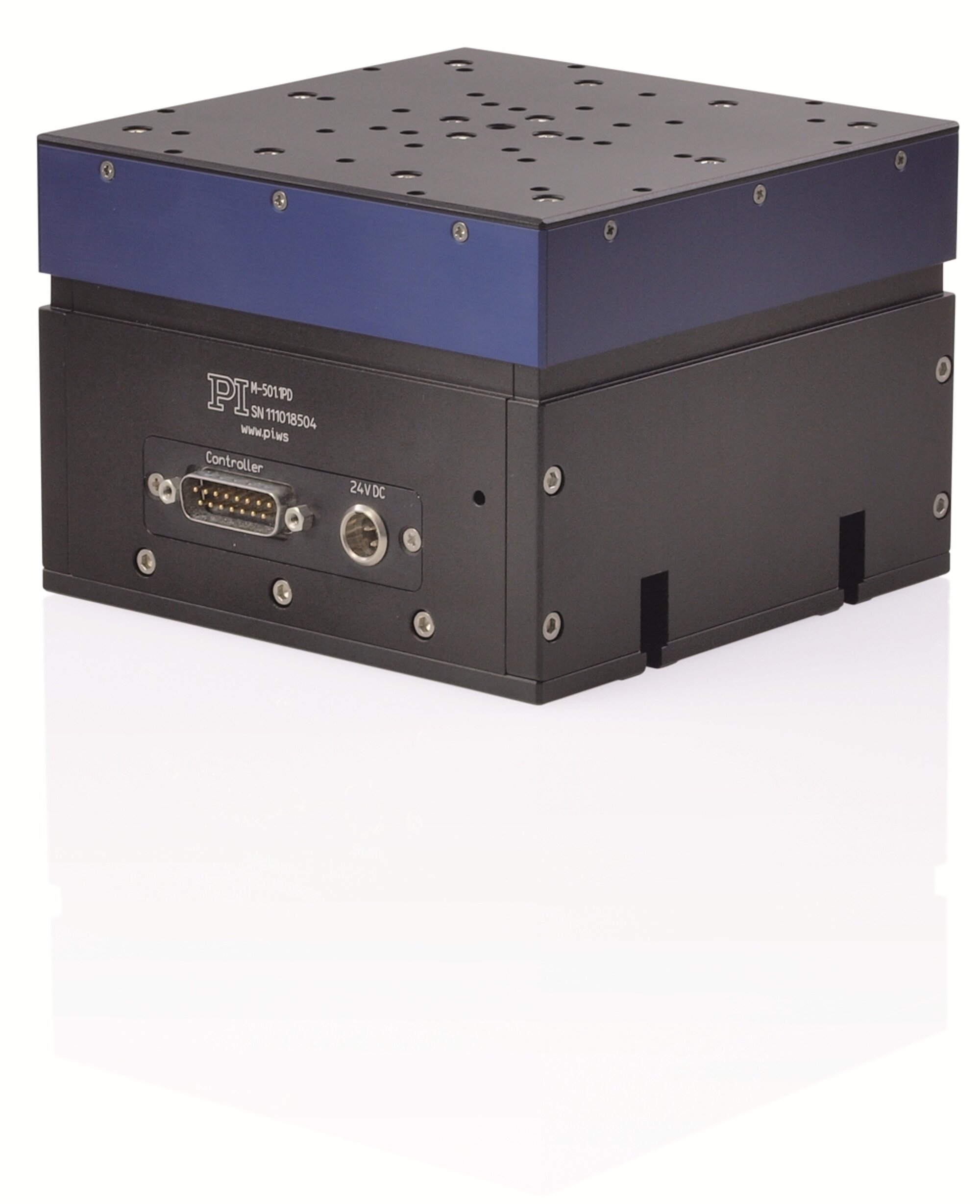
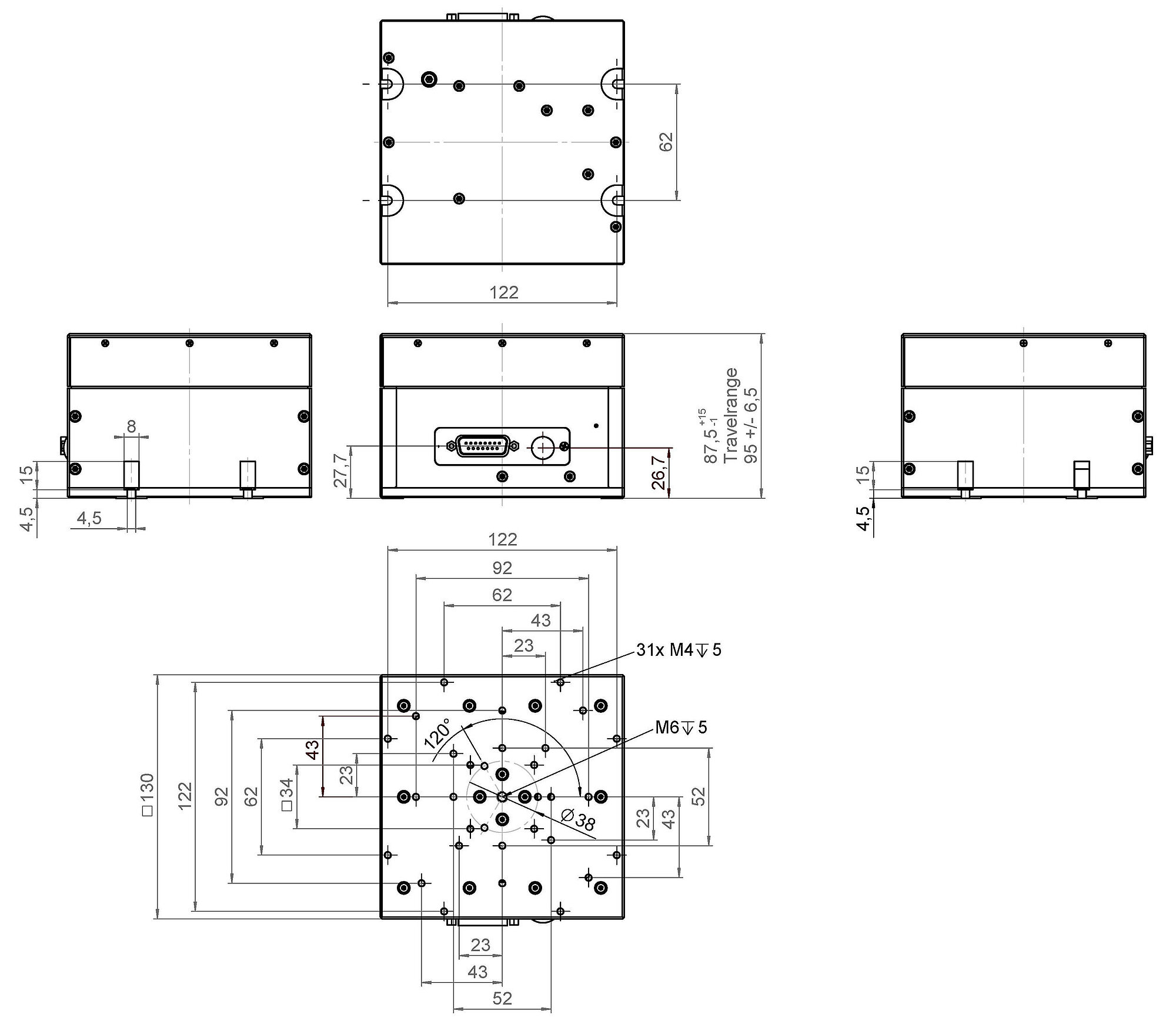
M-501.1DG
Präzisionshubtisch; DC-Getriebemotor; 12,5 mm Stellweg; 100 N Belastbarkeit; 1 mm/s maximale Geschwindigkeit; Kugelumlaufspindel; Inkrementeller Rotationsencoder, 2048 Impulse/U Sensorauflösung, A/B-Quadratur, RS-422




Erhalten Sie innerhalb kürzester Zeit per E-Mail oder Telefon eine Rückmeldung zu Ihren Fragen von einem PI Vertriebsingenieur.