Vorspannung und Belastbarkeit

Die Dauerzugfestigkeiten spröder Piezokeramik- und Einkristallaktoren sind mit Werten im Bereich von 5 bis 10 MPa relativ gering. Daher wird empfohlen, die Aktoren in der Anwendung mechanisch vorzuspannen. Die Vorspannung sollte so niedrig wie möglich gewählt werden. Erfahrungsgemäß genügen zur Kompensation von >> dynamischen Kräften 15 MPa, bei konstanter Belastung sollten 30 MPa nicht überschritten werden.
Querkräfte bewirken in kurzen Aktoren hauptsächlich Scherspannungen. Bei längeren Aktoren mit größerem Aspektverhältnis werden zusätzlich Biegespannungen erzeugt. Die Summe beider Spannungen ergeben maximale Querbelastbarkeiten, die für die >> PICA Shear Aktoren im Datenblatt angegeben sind. Die Werte können auf Aktoren mit ähnlicher Geometrie übertragen werden. Grundsätzlich wird jedoch empfohlen, die Aktoren durch Führungselemente vor Querkräften zu schützen.
Grenzen der Vorspannung
Bereits bei einigen 10 MPa beginnt der Aktor mechanisch zu depolarisieren. Eine Großsignalansteuerung repolarisiert den Aktor, wodurch einerseits zwar die induzierte Auslenkung zunimmt, andererseits aber die effektiven Kapazitäts- und Verlustwerte ansteigen, was nachteilig für die Lebensdauer des Bauelementes ist.
Eine Druckvorspannung erzeugt partiell auch >> Zugspannungen. Daher besteht bei sehr hohen Vorspannungen die Gefahr, dass die Zugspannungsfestigkeit lokal überschritten wird. Die Größe der möglichen Vorspannung wird nicht durch die Festigkeit des keramischen Materials bestimmt. Piezoaktoren erreichen Druckfestigkeiten von mehr als 250 MPa.
Die Aktorsteifigkeit kA ist ein wichtiger Parameter zur Berechnung von Krafterzeugung, Resonanzfrequenz und Systemverhalten. Piezokeramische Stapelaktoren zeichnen sich durch sehr hohe Steifigkeitswerte bis zu einigen Hundert Newton pro Mikrometer aus.
Zur Berechnung dient folgende Gleichung:
![[] Actuator Stiffness](/fileadmin/user_upload/pi_ceramic/IMG/PIC_Gleichung_13.png "[Translate to German:] Actuator Stiffness")
Biegeaktoren hingegen haben um mehrere Größenordnungen geringere Steifigkeiten von einigen Newton pro Millimeter. Neben der Geometrie hängt die Steifigkeit auch bei ihnen vom effektiven Elastizitätsmodul E* ab.
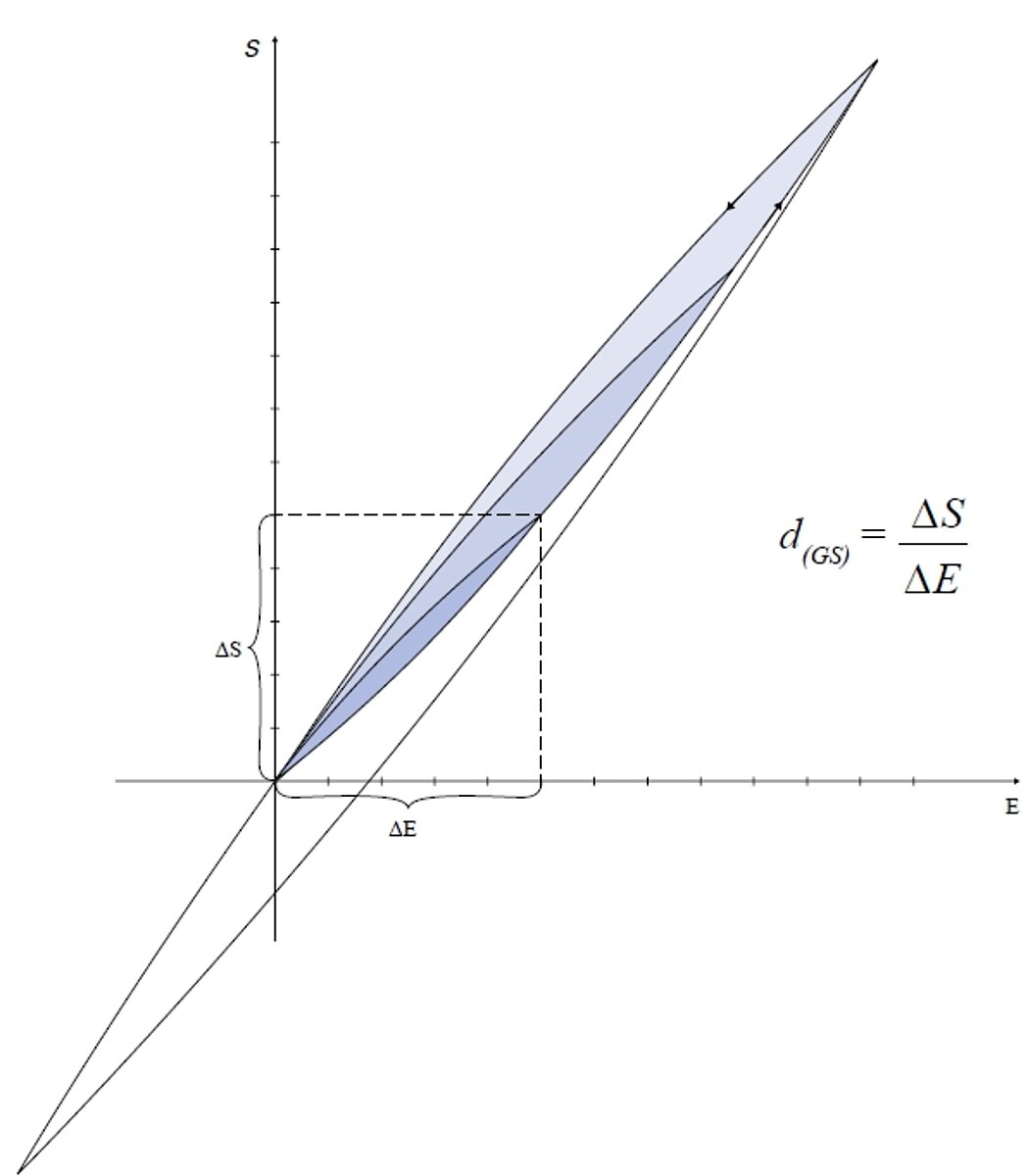
Die Form der Spannungs-Dehnungs-Kurven (Abb. 1) ist aufgrund mechanischer Depolarisationsvorgänge ähnlich nichtlinear und hysteresebehaftet wie die der elektromechanischen Kennlinien (Abb. 2). Darüber hinaus hängt die Kurvenform von den jeweiligen elektrischen Ansteuerbedingungen, der Ansteuerfrequenz und der mechanischen Vorspannung ab, so dass Werte in einem Bereich von 25 bis 60 GPa gemessen werden können. In der Folge ist es daher schwer, einen allgemeingültigen Steifigkeitswert zu definieren.

Für die Angabe der technischen Daten für Piezoaktoren wird die quasistatische Großsignalsteifigkeit bei gleichzeitiger Ansteuerung mit einer hohen Feldstärke bzw. Spannung und geringer mechanischer Vorspannung bestimmt. Damit wird ein ungünstiger Betriebsfall betrachtet, d. h. in einer Anwendung ist die reale Aktorsteifigkeit häufig höher.
Die Klebeschichten in den PICA Aktoren reduzieren die Steifigkeiten nur wenig. Durch den Einsatz optimierter Technologien sind die Klebespalte nur wenige Mikrometer hoch, so dass die Großsignalsteifigkeit gegenüber Multilayeraktoren ohne Klebstoffschichten nur um ca. 10 bis 20 % geringer ist. Einen weit stärkeren Einfluss auf die Gesamtsteifigkeit hat das Aktordesign, z. B. ballige Kopfstücke mit einem relativ nachgiebigen Punktkontakt zur Gegenfläche.
Die Erzeugung von Kraft oder Auslenkung im Piezoaktor lässt sich am besten aus dem Arbeitsdiagramm entnehmen (Abb. 3). Jede Kennlinie wird durch zwei Werte bestimmt: die Nominalauslenkung und die Blockierkraft.
Nominalauslenkung
Die Nominalauslenkung ΔL0 ist in den technischen Daten eines Aktors spezifiziert. Zur Ermittlung des Wertes wird der Aktor frei, d. h. ohne Vorspannung durch eine Feder, betrieben, so dass bei der Auslenkung keine Kraft erzeugt werden muss. Nach dem Anlegen der entsprechenden Spannung wird die Auslenkung gemessen.
Blockierkraft
Die Blockierkraft Fmax ist die maximal vom Aktor erzeugte Kraft. Diese Kraft wird erzielt, wenn man die Auslenkung des Aktors vollständig blockiert, d. h. er arbeitet gegen eine Last mit unendlich hoher Steifigkeit. Da eine solche Steifigkeit real nicht existiert, wird die Blockierkraft folgendermaßen gemessen: Die Aktorlänge vor Ansteuerung wird erfasst. Anschließend wird der Aktor ohne Last bis zur Nominalauslenkung ausgelenkt und mit einer ansteigenden externen Kraft bis auf die Ausgangsposition zurückgedrückt. Die dafür notwendige Kraft ist die Blockierkraft.


Arbeitet der Piezoaktor gegen eine Federkraft, verringert sich seine induzierte Auslenkung, da sich bei der Stauchung der Feder eine Gegenkraft aufbaut. Bei den meisten Anwendungen von Piezoaktoren ist die effektive Steifigkeit der Last kL deutlich geringer als die des Aktors kA. Die resultierende Auslenkung ΔL liegt daher nahe an der Nominalauslenkung ΔL0:


![[] Effective force](/fileadmin/_processed_/2/b/csm_PIC_Gleichung_16_783e972bec.png "[Translate to German:] Effective force")
Wenn große Kräfte erzeugt werden sollen, muss die Laststeifigkeit kL größer als die des Aktors kA sein (Abb. 5):

Die sorgfältige Krafteinleitung ist bei diesem Lastfall besonders wichtig, da im Aktor große mechanische Spannungen entstehen. Um eine hohe Lebensdauer zu erreichen, müssen lokale Zugspannungen unbedingt vermieden werden.
Feff | Effektive Kraft |
Fmax | Blockierkraft |
kL | Laststeifigkeit |
kA | Aktorsteifigkeit |
ΔL0 | Nominalauslenkung |
ΔL | Auslenkung |
V | Betriebsspannung |
V0 | Nominalspannung |

Als Beispiel eines Lastfalls, bei dem eine nichtlineare Arbeitskennlinie entsteht, ist in Abb. 6 eine Ventilsteuerung skizziert. Der Start der Auslenkung entspricht dem Betrieb ohne Last. In der Nähe des Ventilschlusses wirkt eine stärkere Gegenkraft durch die Fluidströmung. Beim Erreichen des Ventilsitzes wird die Auslenkung nahezu vollständig blockiert, so dass sich nur die Kraft erhöht.
Feff | Effektive Kraft |
| Fmax | Blockierkraft |
kL | Laststeifigkeit |
kA | Aktorsteifigkeit |
ΔL0 | Nominalauslenkung |
ΔL | Auslenkung |
V | Betriebsspannung |
V0 | Nominalspannung |

Wird auf den Aktor eine Masse gelegt, führt die Gewichtskraft FV zu einer Stauchung des Aktors. Die Nullposition bei Beginn der darauffolgenden Ansteuerung verschiebt sich entlang der Steifigkeitskennlinie des Aktors. Während der darauffolgenden Ansteuerung entsteht keine zusätzliche Kraft, so dass die Arbeitskennlinie näherungsweise dem Verlauf ohne Vorspannung entspricht (Abb. 7).
Ein Beispiel für eine solche Anwendung ist die Dämpfung von Schwingungen einer Maschine mit großer Masse.
Feff | Effektive Kraft |
Fmax | Blockierkraft |
kL | Laststeifigkeit |
kA | Aktorsteifigkeit |
ΔL0 | Nominalauslenkung |
ΔL | Auslenkung |
V | Betriebsspannung |
V0 | Nominalspannung |
Federvorspannung

Federvorspannung
Wird die mechanische Vorspannung durch eine relativ weiche Feder in einem Gehäuse aufgebracht, findet die gleiche Verschiebung auf der Steifigkeitskennlinie wie beim Auflegen der Masse statt (Abb. 8). Bei elektrischer Ansteuerung erzeugt der Aktor jedoch eine kleine zusätzliche Kraft und die Auslenkung wird durch die Vorspannfeder gegenüber dem Fall ohne Last etwas reduziert. Die Steifigkeit der Vorspannfeder sollte daher mindestens eine Größenordnung unter der des Aktors liegen.
Bei longitudinalen Stapelaktoren ist die Aktorlänge die bestimmende Größe für die Auslenkung ΔL0. Bei Nominalfeldstärken von 2 kV/mm sind Auslenkungen von etwa 0,10 bis 0,15 % der Länge erzielbar. Die Querschnittsfläche bestimmt die Blockierkraft Fmax. Hier können etwa 30 N/mm² erreicht werden.
Für die erzielbare mechanische Energie Emech=(ΔL0 F max)/2 ist demzufolge das Aktorvolumen der bestimmende Parameter.
Die Energiemenge Emech, die beim Betrieb eines Aktors von elektrischer in mechanische Energie umgewandelt wird, entspricht der Fläche unter der Kennlinie in Abb. 9. Von dieser Gesamtmenge kann jedoch nur ein Bruchteil Eoutan die mechanische Last abgegeben werden. Das mechanische System ist energetisch optimiert, wenn die Fläche ihr Maximum erreicht. Dieser Fall tritt ein, wenn die Laststeifigkeit und die Aktorsteifigkeit gleich sind. Die im Arbeitsdiagramm hellblau dargestellte Fläche entspricht diesem Betrag. Ein longitudinaler Piezoaktor kann ca. 2 bis 5 mJ/cm³ mechanische Arbeit verrichten, ein Biegeaktor erreicht etwa
10-fach geringere Werte.
Wirkungsgrad und Energiebilanz eines piezoaktorischen Systems
Die Berechnung und Optimierung des Gesamtwirkungsgrades eines piezoaktorischen Systems hängt von der Effizienz der Verstärkerelektronik, der elektromechanischen Wandlung, des mechanischen Energietransfers und der möglichen Energierückgewinnung ab. Grundsätzlich handelt es sich bei dem Großteil der elektrischen und mechanischen Energien um Blindenergien, die unter Abzug der Verluste, z. B. durch Wärmeentwicklung, wieder zurückgewonnen werden können. Damit können, vor allem in dynamischen Anwendungen, sehr effiziente Piezosysteme aufgebaut werden.