
Bei Ansteuerung mit einem elektrischen Feld parallel zur Richtung der Polarisation findet im Piezoaktor neben der Verlängerung in Polarisationsrichtung, die bei Longitudinalaktoren genutzt wird, gleichzeitig immer eine Kontraktion orthogonal zur Polarisation statt.
Dieser sogenannte transversale piezoelektrische Effekt wird bei Kontraktoren, Piezorohren oder Biegeaktoren ausgenutzt.
Longitudinalaktoren


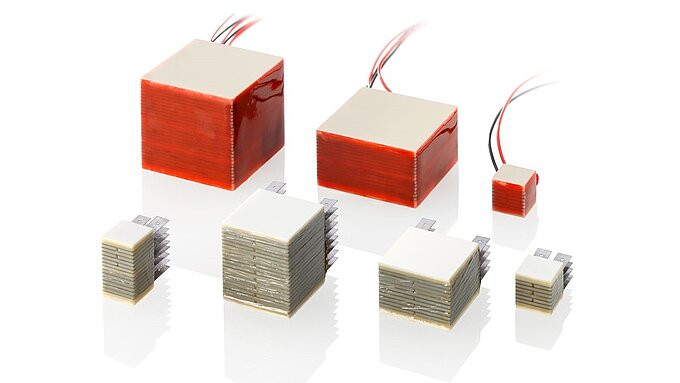
In longitudinalen Piezoaktoren wird das elektrische Feld in der Keramikschicht parallel zur Richtung der Polarisation angelegt. Dadurch wird eine Dehnung oder Auslenkung in Richtung der Polarisation induziert. Einzelne Schichten liefern relativ geringe Auslenkungen. Um technisch nutzbare Auslenkungswerte zu erreichen, werden Stapelaktoren aufgebaut, in denen viele Einzellagen mechanisch in Reihe und elektrisch parallel verschaltet sind (Abb. 1).
Die Wandlungseffizienz elektrischer in mechanische Energie ist für longitudinale Stapelaktoren hoch. Sie erzielen Nominalauslenkungen von etwa 0,1 bis 0,15 % der Aktorlänge.
Die Nominalblockierkräfte liegen in der Größenordnung von 30 N/mm2, bezogen auf die Aktorquerschnittsfläche. Im Aktor können damit Werte bis zu mehreren 10.000 Newton erreicht werden.
Longitudinale Stapelaktoren eignen sich durch ihre hohen Resonanzfrequenzen hervorragend für den hochdynamischen Betrieb. Eine mechanische Vorspannung des Aktors unterdrückt dynamisch induzierte Zugkräfte im spröden Keramikmaterial, sodass Ansprechzeiten im Mikrosekundenbereich und hohe mechanische Leistungen erzeugt werden können.
Abschätzung der longitudinalen Auslenkung mit:




Scheraktoren

In piezoelektrischen Scheraktoren wird das elektrische Feld in der Keramikschicht orthogonal zur Richtung der Polarisation angelegt und die Auslenkung in Richtung der Polarisation ausgenutzt. Auch hier summieren sich in gestapelten Aktoren die Auslenkungen der einzelnen Schichten auf (Abb. 2).
Die Scherdeformationskoeffizienten d15 sind in der Regel die größten der piezoelektrischen Koeffizienten. Bei Ansteuerung mit den nominalen Spannungen erreichen die Piezokeramiken d15(GS)-Werte bis 2000 pm/V. Die zulässige Ansteuerfeldstärke ist begrenzt, um ein Umpolen der senkrecht orientierten Polarisation zu vermeiden.
Wenn Querkräfte auf den Aktor wirken, wird die Scherbewegung zusätzlich durch eine Biegung überlagert. Derselbe Effekt tritt beim dynamischen Betrieb in der Nähe der Resonanzfrequenz auf.
Außerdem können Scherspannungen nicht durch eine mechanische Vorspannung kompensiert werden. Beides begrenzt die sinnvolle Aufbauhöhe von Scherstapeln. Scheraktoren kombiniert mit Longitudinalaktoren ergeben sehr kompakte XYZ-Stapel mit hohen Resonanzfrequenzen.
Ein typischer Einsatzfall für Scheraktoren sind Antriebselemente für Stick-Slip-Motoren.
Abschätzung der Auslenkung eines Scheraktors mit:

Rohraktoren sind radial polarisiert. Die Elektroden sind auf den Mantelflächen aufgebracht, so dass das Feld parallel zur Polarisation ebenfalls in radialer Richtung verläuft. Rohraktoren nutzen den transversalen piezoelektrischen Effekt, um Auslenkungen zu erzeugen. Möglich sind axiale Auslenkungen bzw. Längenänderungen (Abb. 3), laterale Bewegungen wie Änderungen des Radius (Abb. 4), sowie Biegungen (Abb. 5).
Um die Biegung eines Rohres zu erzeugen, wird die äußere Elektrode in mehrere Abschnitte segmentiert. Durch Ansteuerung der jeweils gegenüber liegenden Elektroden verbiegt sich das Rohr in lateraler Richtung.
Dabei auftretende unerwünschte Verkippungen oder axiale Bewegungen können durch komplexere Elektrodenanordnungen vermieden werden. So erzeugt eine 8-Elektrodenanordnung eine Gegenbiegung und erreicht insgesamt eine laterale Verschiebung ohne Verkippung.
Rohraktoren werden häufig in Rastersondenmikroskopen zur Erzeugung dynamischer Scan-Bewegungen im offenen Regelkreis sowie als Fiberstretcher angewendet. Weitere Anwendungsbeispiele finden sich in der Mikrodosierung zum Aufbau von Nanoliterpumpen oder Tintenstrahldruckern.
Alle Rohrabmessungen siehe Datenblatt >> PT120 – PT140.
| ΔLaxial | Axiale Rohrauslenkung [m] |
| ΔLradial | Radiale Rohrauslenkung [m] |
| ΔLlateral | Laterale Rohrauslenkung [m] |
| d31(GS) | Transversaler piezo-elektrischer Großsignal-Deformationskoeffizient [m/V] |
| l | Rohrlänge [m] |
| ID | Rohrinnendurchmesser [m] |
| t | Rohrwandstärke (=(OD-ID)/2) [m] |
| V | Betriebsspannung [V] |
| GND | Masse |
| P | Polarisationsrichtung |
| E | Elektrisches Feld |






Kontraktoren
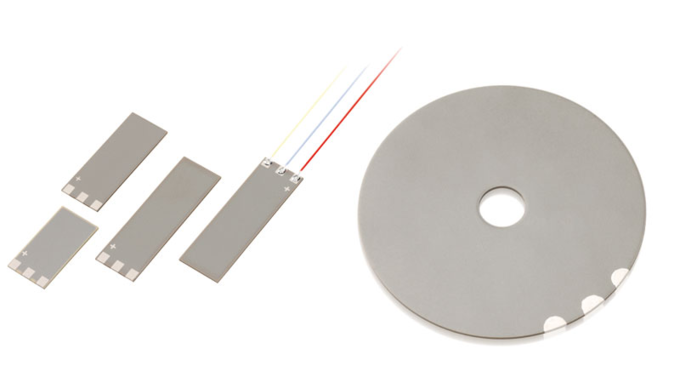
Piezokontraktoren sind typischerweise flache Bauelemente. Ihre Auslenkung erfolgt quer zur Polarisationsrichtung und zum elektrischen Feld. Die Auslenkung von Kontraktoren beruht auf dem transversalen piezoelektrischen Effekt, wobei nominal bis ca. 20 μm erreicht werden.
Multilayerelemente bieten gegenüber einschichtigen Piezoelementen entscheidende Vorteile für die technische Realisierung: Aufgrund der größeren Querschnittsfläche erzeugen sie höhere Kräfte bzw. können sie mit niedrigerer Ansteuerspannung betrieben werden (Abb. 6).
Durch die Kontraktion entstehen in der Piezokeramik Zugspannungen, die in der spröden Keramik Schäden verursachen können. Eine Vorspannung ist daher empfehlenswert.
Abschätzung der transversalen Auslenkung eines Kontraktors mit:




Aufgebracht auf ein Substrat wirken Kontraktoren als Biegeaktoren (Abb. 7). Für den Aufbau von Vollkeramikbiegern werden zwei aktive Piezokeramikelemente zusammengefügt und elektrisch angesteuert. Wird ein passives Substrat z. B. aus Metall oder Keramikmaterial verwendet, spricht man von Verbundbiegern. Die Piezokeramikelemente können sowohl als Einzelschichten als auch als Multilayer-Elemente ausgeführt sein.
Piezoelektrische Biegeaktoren funktionieren nach dem Prinzip von Thermobimetallen. Durch die Kopplung eines flächigen Piezokontraktors mit einer zweiten Schicht entsteht bei der Ansteuerung und Kontraktion der Keramik ein Biegemoment, welches die geringe transversale Längenänderung in eine große Biegeauslenkung senkrecht zur Kontraktion umwandelt. Je nach Geometrie sind Übersetzungsfaktoren von 30 bis 40 erreichbar, allerdings auf Kosten der Wandlungseffizienz und der Krafterzeugung.
Mit piezoelektrischen Biegeaktoren können Auslenkungen bis zu einigen Millimetern bei Ansprechzeiten im Millisekundenbereich erzielt werden. Die Blockierkräfte sind jedoch relativ gering. Sie liegen typischerweise im Bereich von Millinewton bis zu wenigen Newton.
| ΔLbend | Biegeauslenkung [m] |
| d31(GS) | Transversaler piezoelektrischer Großsignal-Deformationskoeffizient [m/V] |
| n | Anzahl der gestapelten Keramikschichten |
| V | Betriebsspannung [V] |
| lf | Freie Biegerlänge [m] |
| hp | Höhe Piezokeramikelement [m] |
| Rh | Verhältnis der Höhen von Substrat (hs) und Piezo-keramikelement (hp) in einem Verbundbieger (Rh=hs/hp) |
| RE | Verhältnis der Elastizitätsmodule von Substrat (Es) und Piezokeramikelement (Ep) in einem Verbundbieger (RE=Es/Ep) |
| VF | Festspannung zur Biegeransteuerung [V] (V und VF können mit einer Offset-Spannung überlagert werden) |
| GND | Masse |
| P | Polarisationsrichtung |
| E | Elektrisches Feld |
Abschätzung der Biegeauslenkung eines Vollkeramikbiegers (Parallelschaltung) mit:
![Biegeauslenkung [m] (Parallelschaltung)](/fileadmin/_processed_/6/6/csm_PIC_Gleichung_7_78a3ebc92d.png "Biegeauslenkung [m] (Parallelschaltung)")

Abschätzung der Biegeauslenkung eines Zweischicht-Verbundbieger (einseitige Auslenkung) mit:
![Biegeauslenkung [m] (Zweischicht-Verbundbieger)](/fileadmin/_processed_/9/d/csm_PIC_Gleichung_9_4d89731fa8.png "Biegeauslenkung [m] (Zweischicht-Verbundbieger)")


Abschätzung der Biegeauslenkung eines Vollkeramikbiegers (Reihenschaltung) mit:
![Biegeauslenkung [m] (Reihenschaltung)](/fileadmin/_processed_/5/8/csm_PIC_Gleichung_8_2d9224919a.png "Biegeauslenkung [m] (Reihenschaltung)")

![Biegeauslenkung [m] (Dreischicht-Verbundbieger)](/fileadmin/_processed_/a/3/csm_PIC_Gleichung_10_8cb0c6cf3b.png "Biegeauslenkung [m] (Dreischicht-Verbundbieger)")


