Absolutencoder
Absolutencoder werden zur Positionserfassung eingesetzt und liefern eine Information über die absolute Position einer bewegten Plattform. Dies kann z.B. optisch durch die Verwendung einer zusätzlichen Pseudo Random Code (PRC) Skala realisiert werden.
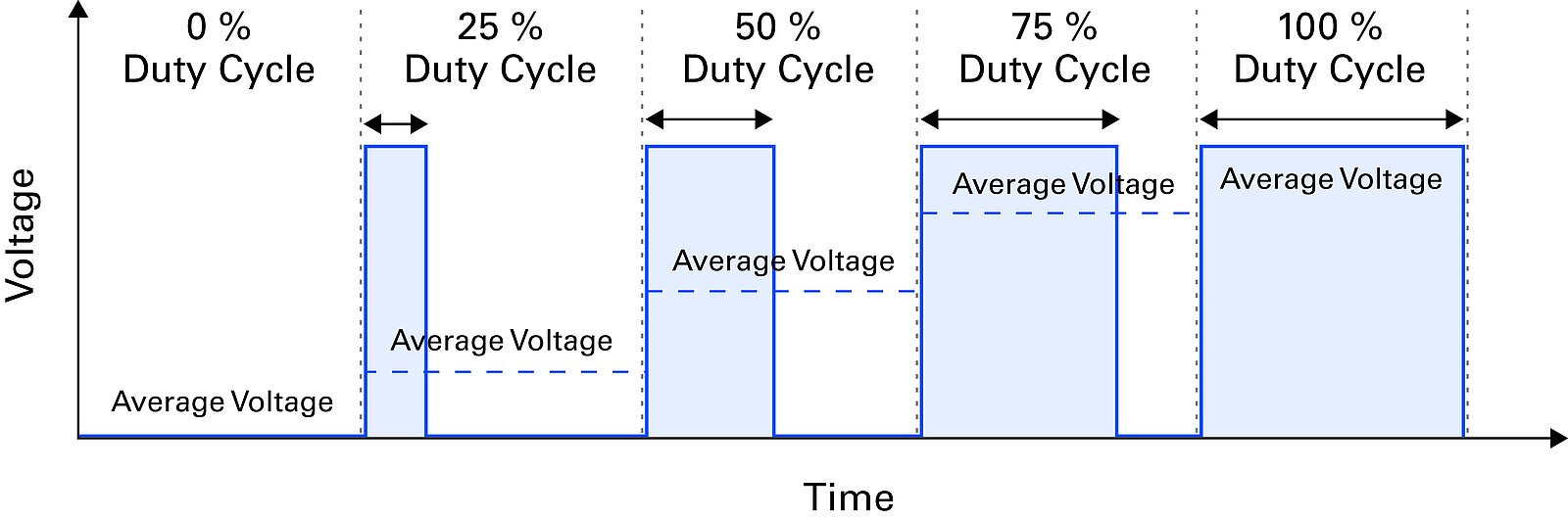
DC-Motor mit ActiveDrive (PWM)
Um höhere Geschwindigkeiten zu ermöglichen, hat PI die ActiveDrive-Technologie zur Steuerung von Motoren entwickelt, deren Nennleistung die Ausgangsleistung des Controllers übersteigt. Dabei wird ein Verstärker zusammen mit dem Motor in einem abgeschirmten Gehäuse integriert. Der integrierte Verstärker wird vom Controller mit einer Pulsweitenmodulation (PWM) angesteuert. Wie in unten dargestellt, wird die Motorleistung über das Verhältnis der Ein-und Ausschaltdauer geregelt. Dies erfordert ein separates Netzteil zur Verstärkerversorgung und eine optimierte Wärmeabfuhr zur Präzisionserhaltung.
Anstiegszeit
Zeitkonstante des Controllers/Verstärkers: Die Zeit, die benötigt wird, um von 10 % auf 90 % des maximalen Spannungshubs zu kommen.
Antriebstyp
Gibt an, welche Antriebsarten durch den Controller/Treiber unterstützt werden, z. B. DC-Motoren, Piezoschreitantriebe, Piezoaktoren oder Linearmotoren.
Arbeitsraum
Die Gesamtheit aller Kombinationen von Übersetzungen und Rotationen, die der Hexapod von der aktuellen Position aus erreichen kann, wird als "Arbeitsraum" bezeichnet.
Auflösung
Auflösung in der Positionierung bezeichnet die kleinste Abstandsänderung, die vom System unterschieden werden kann. Die Auflösung von piezobasierten Positioniersystemen und Piezoaktoren ist im Prinzip unbegrenzt, weil sie nicht durch Haft- oder Gleitreibung beeinflusst wird. Stattdessen wird dort das Äquivalent zum Elektronikrauschen spezifiziert. Werte sind typische Ergebnisse (RMS, 1 σ).